
一种轮毂码垛机器人.pdf

春景****23

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮毂码垛机器人.pdf
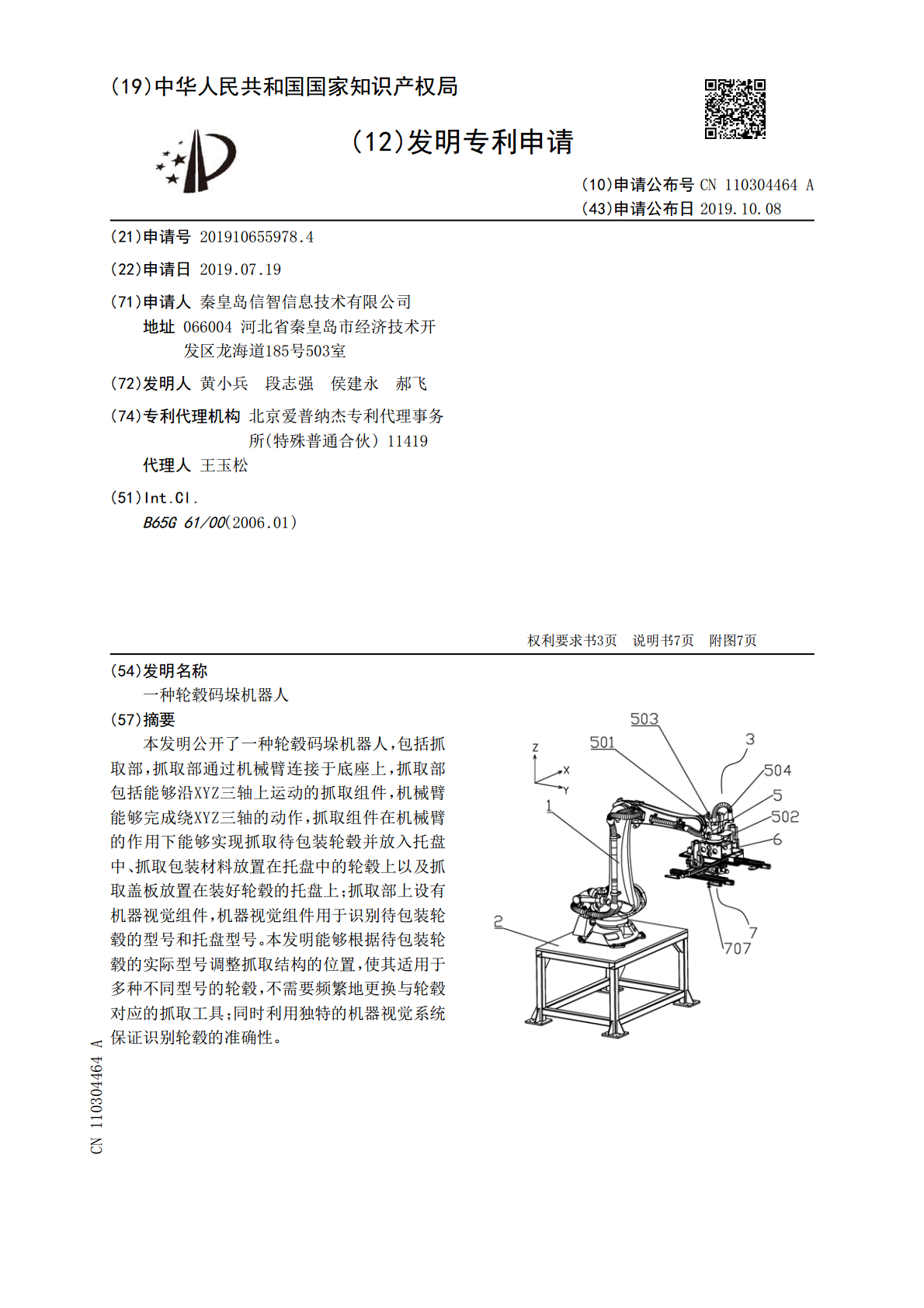
本发明公开了一种轮毂码垛机器人,包括抓取部,抓取部通过机械臂连接于底座上,抓取部包括能够沿XYZ三轴上运动的抓取组件,机械臂能够完成绕XYZ三轴的动作,抓取组件在机械臂的作用下能够实现抓取待包装轮毂并放入托盘中、抓取包装材料放置在托盘中的轮毂上以及抓取盖板放置在装好轮毂的托盘上;抓取部上设有机器视觉组件,机器视觉组件用于识别待包装轮毂的型号和托盘型号。本发明能够根据待包装轮毂的实际型号调整抓取结构的位置,使其适用于多种不同型号的轮毂,不需要频繁地更换与轮毂对应的抓取工具;同时利用独特的机器视觉系统保证识别
一种汽车轮毂码垛机器人.pdf
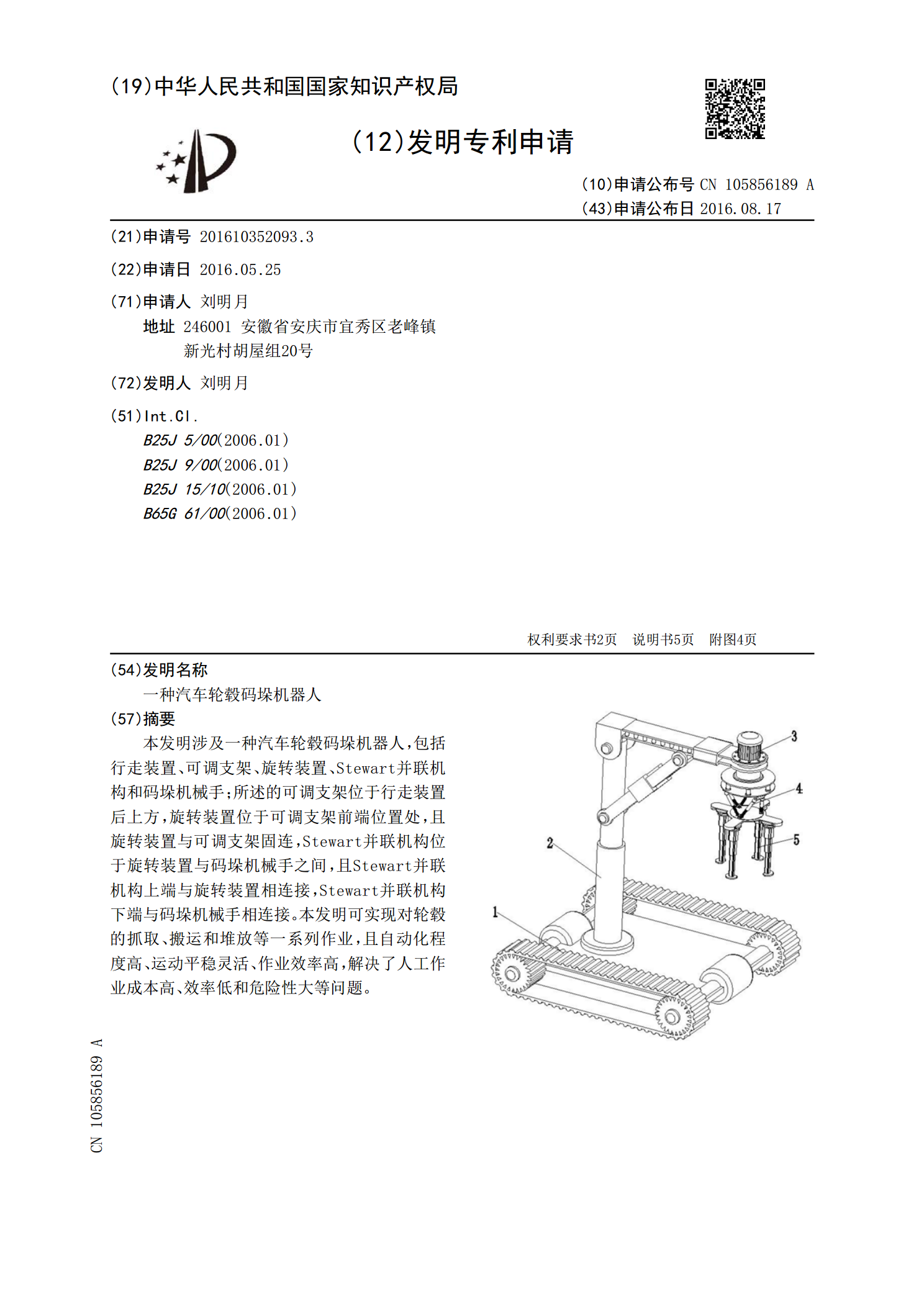
本发明涉及一种汽车轮毂码垛机器人,包括行走装置、可调支架、旋转装置、Stewart并联机构和码垛机械手;所述的可调支架位于行走装置后上方,旋转装置位于可调支架前端位置处,且旋转装置与可调支架固连,Stewart并联机构位于旋转装置与码垛机械手之间,且Stewart并联机构上端与旋转装置相连接,Stewart并联机构下端与码垛机械手相连接。本发明可实现对轮毂的抓取、搬运和堆放等一系列作业,且自动化程度高、运动平稳灵活、作业效率高,解决了人工作业成本高、效率低和危险性大等问题。

一种汽车轮毂码垛机器人用码垛机械手.pdf
本发明涉及一种汽车轮毂码垛机器人用码垛机械手,包括码垛台架、电动滑轨、移动滑块、电动转盘、液压缸、卡盘和锁紧螺栓,且电动滑轨、移动滑块、电动转盘、液压缸、卡盘和锁紧螺栓的数量均为四;所述的码垛台架中部设置有安装盘,电动滑轨固定在码垛台架的支脚底端面上,移动滑块安装在电动滑轨上,电动转盘位于移动滑块正下方,且电动转盘上端与移动滑块相连接,电动转盘下端与液压缸上端相连接,液压缸下端与卡盘之间采用锁紧螺栓进行连接固定。本发明可进行两平移一转动共三个自由度方向的运动,其径向间距可调,便于对不同直径大小的轮毂进行抓

一种汽车轮毂机器人码垛单元.pdf
本发明提供一种汽车轮毂机器人码垛单元,包括轮毂输送辊筒线、托盘上料设备、隔板库、码垛机器人和包装辊筒输送线。本发明的目的在于提供一种制造成本低、码垛效率高、适用范围广的汽车轮毂机器人码垛单元,能够完成15吋和24吋轮毂的自动化码垛;本发明人工参与度低、打包效率高,能够自动识别不同的轮毂并选择与之相匹配的打包方式,满足企业实际生产需要。
一种汽车轮毂码垛机器人用移动支撑装置.pdf
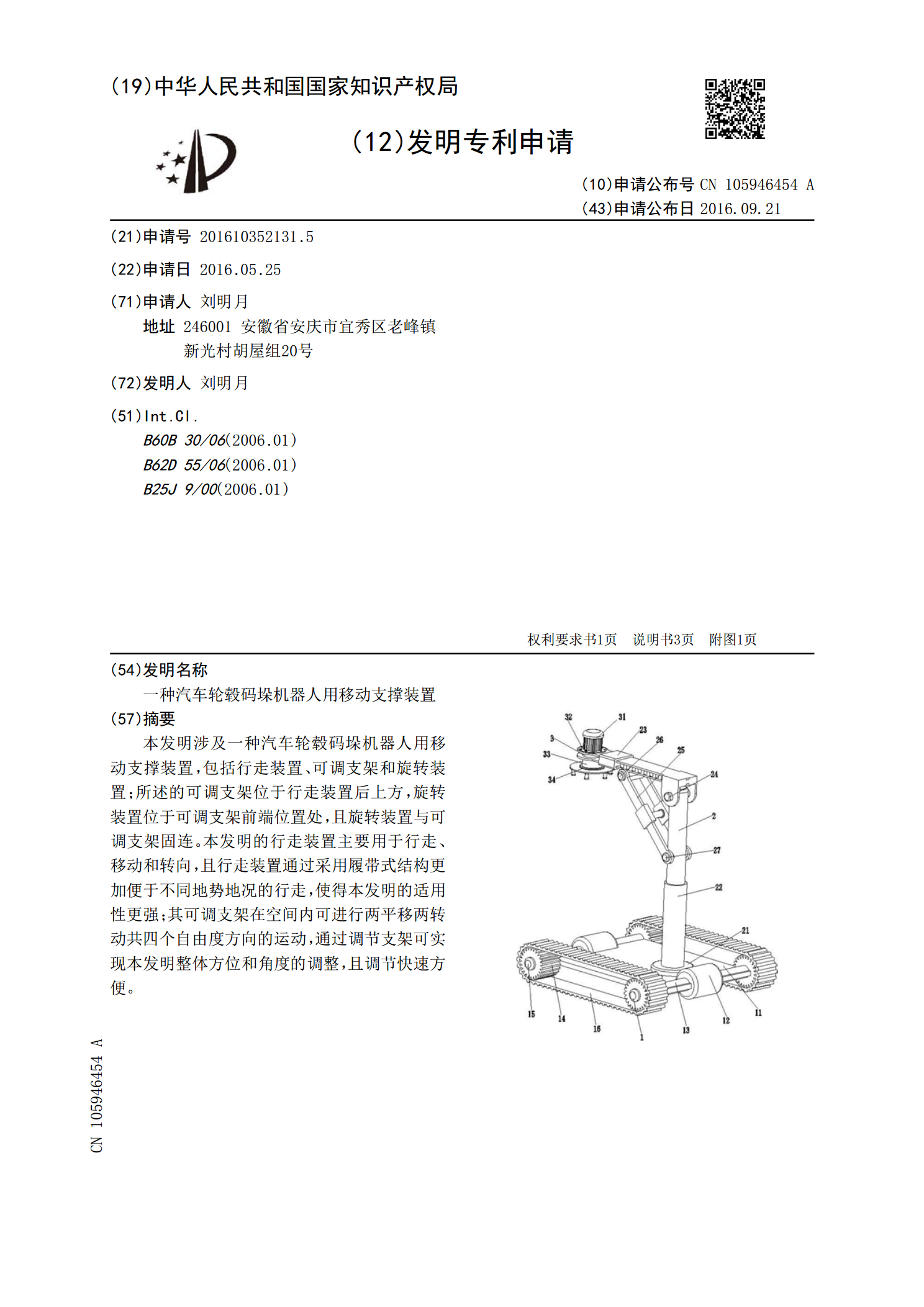
本发明涉及一种汽车轮毂码垛机器人用移动支撑装置,包括行走装置、可调支架和旋转装置;所述的可调支架位于行走装置后上方,旋转装置位于可调支架前端位置处,且旋转装置与可调支架固连。本发明的行走装置主要用于行走、移动和转向,且行走装置通过采用履带式结构更加便于不同地势地况的行走,使得本发明的适用性更强;其可调支架在空间内可进行两平移两转动共四个自由度方向的运动,通过调节支架可实现本发明整体方位和角度的调整,且调节快速方便。