
一种臂架变幅角度检测装置.pdf

文宣****66


1/9

2/9

3/9
4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种臂架变幅角度检测装置.pdf
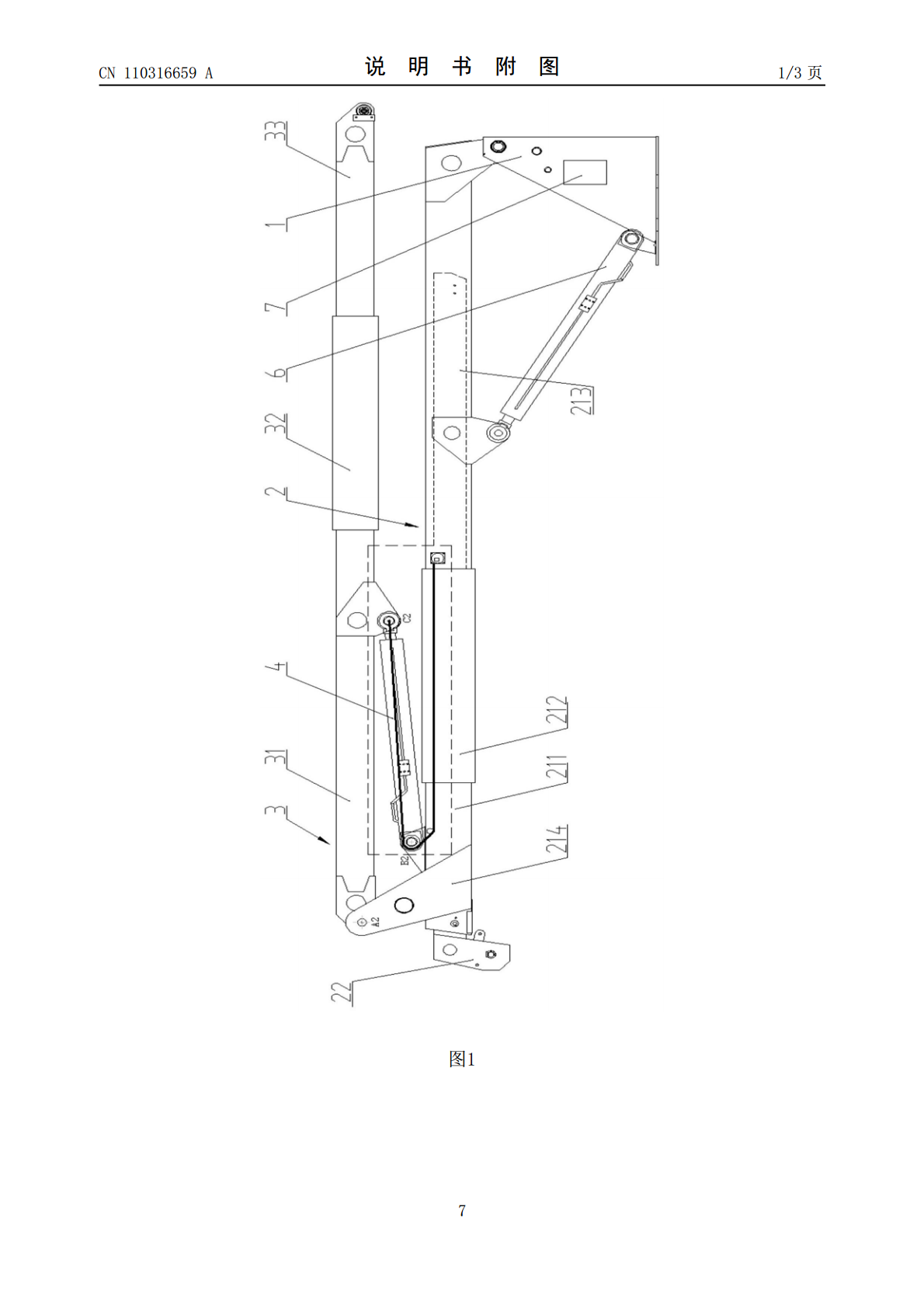
本发明公开了一种臂架变幅角度检测装置,该装置包括依次连接的一级后臂、一级臂绝缘段、设有支座的一级前臂和依次连接的二级前臂、二级臂绝缘段以及二级后臂,一级后臂铰接在臂架支撑上,二级前臂铰接在支座上,臂架支撑和一级后臂间铰接一级变幅油缸,一级前臂与二级前臂分别通过第一转轴和第二转轴铰接二级变幅油缸;一级后臂上设拉线传感器、一级前臂上设过渡轮,第一转轴上设滑轮,拉线传感器内柔性软索穿过过渡轮和滑轮后固定在第二转轴的端面中心上,拉线传感器与控制器电性连接,本装置内电气元件构造简单,成本低廉,技术成熟可靠,通过检测

臂架变幅检测装置及举高消防车.pdf
本发明涉及一种臂架变幅检测装置及举高消防车,臂架变幅检测装置包括角度传感器,还包括第一齿轮和第二齿轮,第一齿轮固定在臂架的主臂轴上,第二齿轮与第一齿轮啮合,且角度传感器的中心轴固定在第二齿轮的中心,中心轴与第二齿轮的转动轴线重合,角度传感器的外壳固定在转台上。本发明将相对啮合转动的第一齿轮和第二齿轮分别设置在臂架的主臂轴和固定在转台上的角度传感器的中心轴上,在这种结构形式下,臂架在动作过程中产生的变形对主臂轴的影响较小,主臂轴本身不会发生较大的变形,因此也就确保了臂架的变形对角度传感器的影响十分有限,不仅
一种新型臂架变幅机构及具有该臂架变幅机构的混凝土泵车.pdf
本发明涉及一种新型臂架变幅机构,用于控制臂架的展开与收回,包括转台、第一节臂与第一节臂油缸,所述第一节臂与所述转台铰接,所述第一节臂油缸的一端与所述第一节臂铰接,该臂架变幅机构还包括支撑架和连杆,所述连杆的一端与所述第一节臂铰接,所述连杆的另一端与所述支撑架铰接,所述支撑架的一端与所述转台铰接,所述支撑架的另一端与所述第一节臂油缸的另一端铰接,且所述第一节臂油缸设于所述第一节臂的上方。通过将第一节臂油缸设于所述第一节臂的上方,消除了现有技术采用第一节臂油缸设于第一节臂下方而对第二节臂以及第三节臂的长度设计
一种变幅起重机臂架.pdf
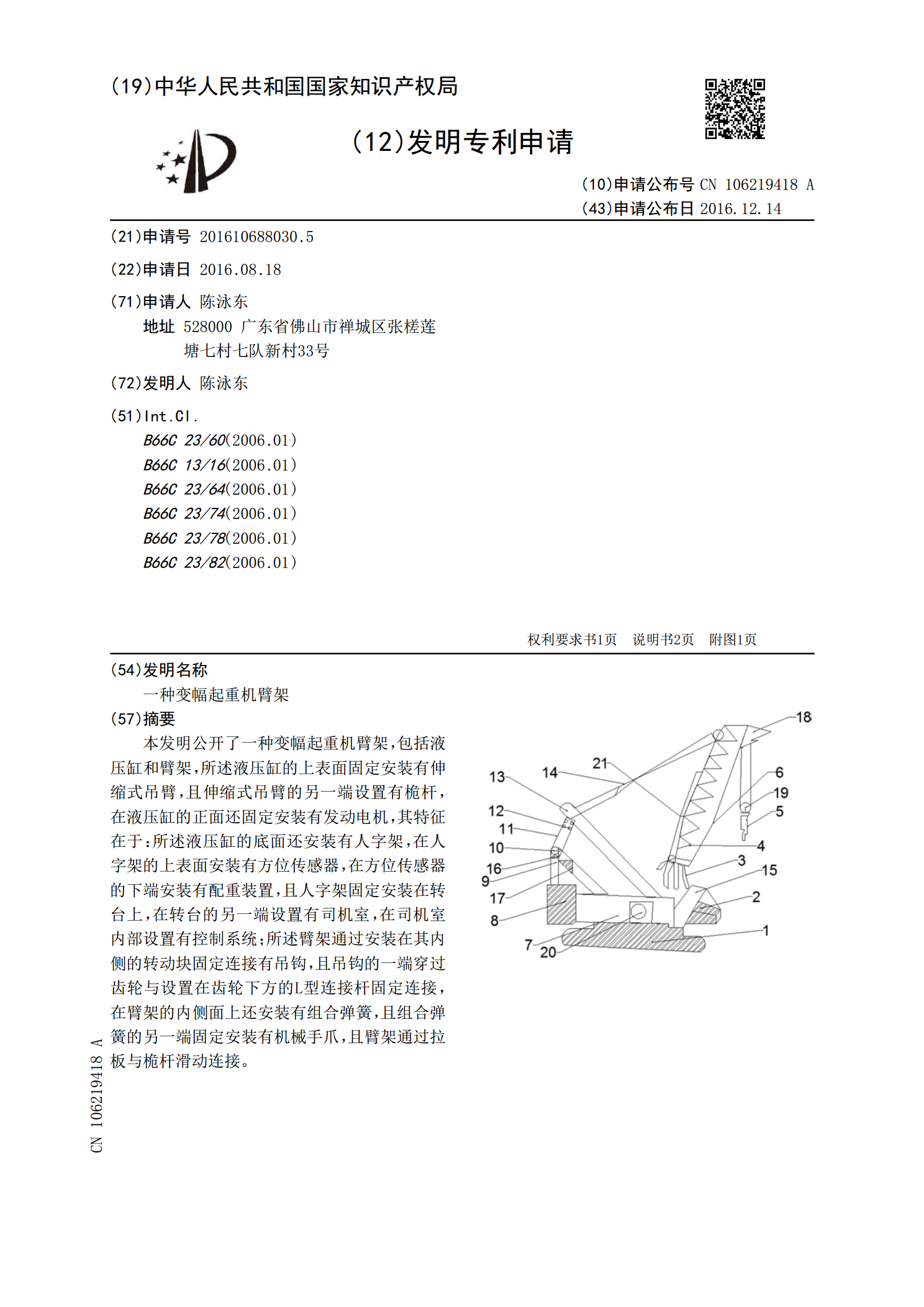
本发明公开了一种变幅起重机臂架,包括液压缸和臂架,所述液压缸的上表面固定安装有伸缩式吊臂,且伸缩式吊臂的另一端设置有桅杆,在液压缸的正面还固定安装有发动电机,其特征在于:所述液压缸的底面还安装有人字架,在人字架的上表面安装有方位传感器,在方位传感器的下端安装有配重装置,且人字架固定安装在转台上,在转台的另一端设置有司机室,在司机室内部设置有控制系统;所述臂架通过安装在其内侧的转动块固定连接有吊钩,且吊钩的一端穿过齿轮与设置在齿轮下方的L型连接杆固定连接,在臂架的内侧面上还安装有组合弹簧,且组合弹簧的另一端
一种变幅起重机臂架.pdf
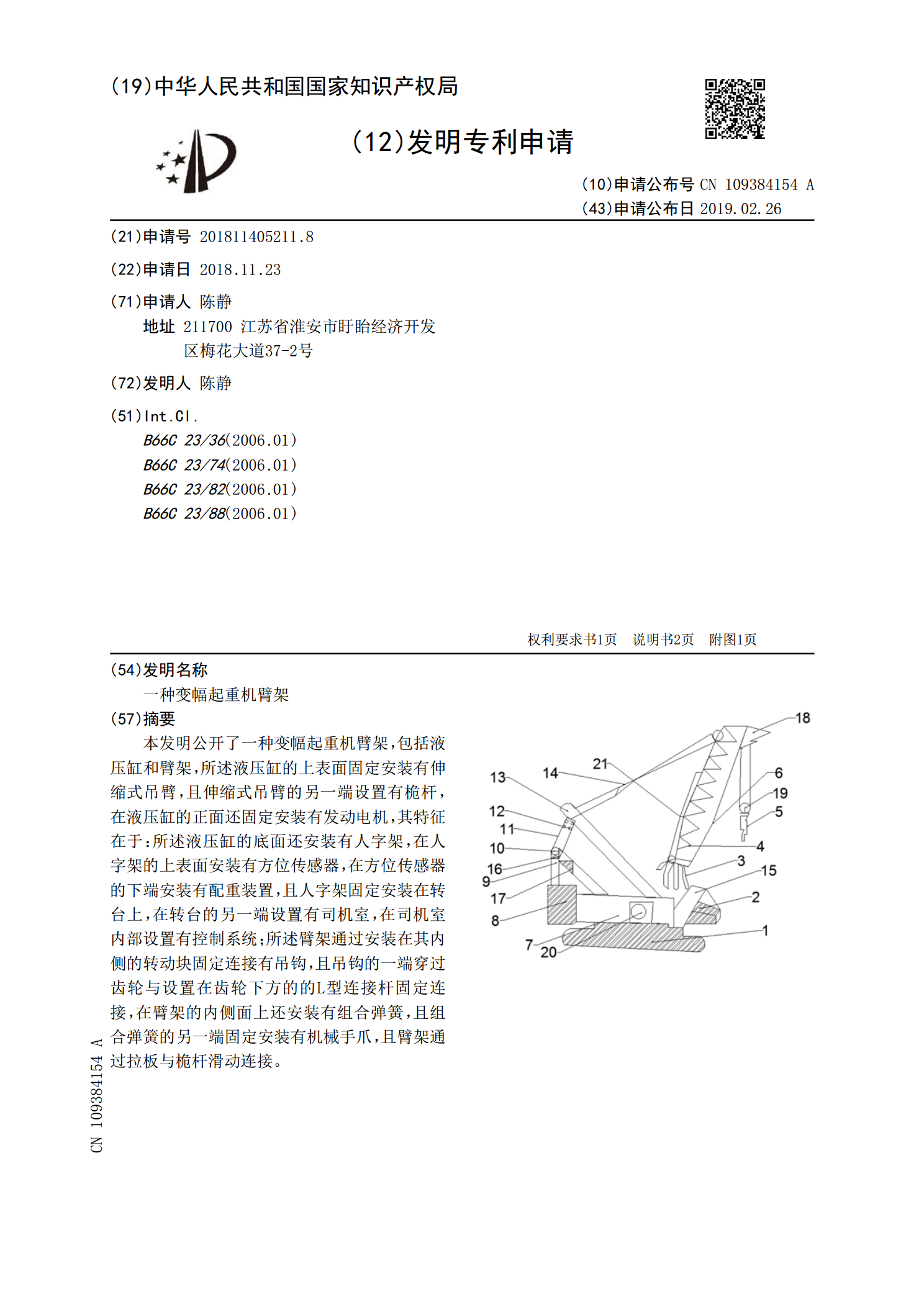
本发明公开了一种变幅起重机臂架,包括液压缸和臂架,所述液压缸的上表面固定安装有伸缩式吊臂,且伸缩式吊臂的另一端设置有桅杆,在液压缸的正面还固定安装有发动电机,其特征在于:所述液压缸的底面还安装有人字架,在人字架的上表面安装有方位传感器,在方位传感器的下端安装有配重装置,且人字架固定安装在转台上,在转台的另一端设置有司机室,在司机室内部设置有控制系统;所述臂架通过安装在其内侧的转动块固定连接有吊钩,且吊钩的一端穿过齿轮与设置在齿轮下方的的L型连接杆固定连接,在臂架的内侧面上还安装有组合弹簧,且组合弹簧的另一