
一种基于栅格的轮廓线段特征提取算法.pdf

努力****恨风

1/10
2/10
3/10
4/10
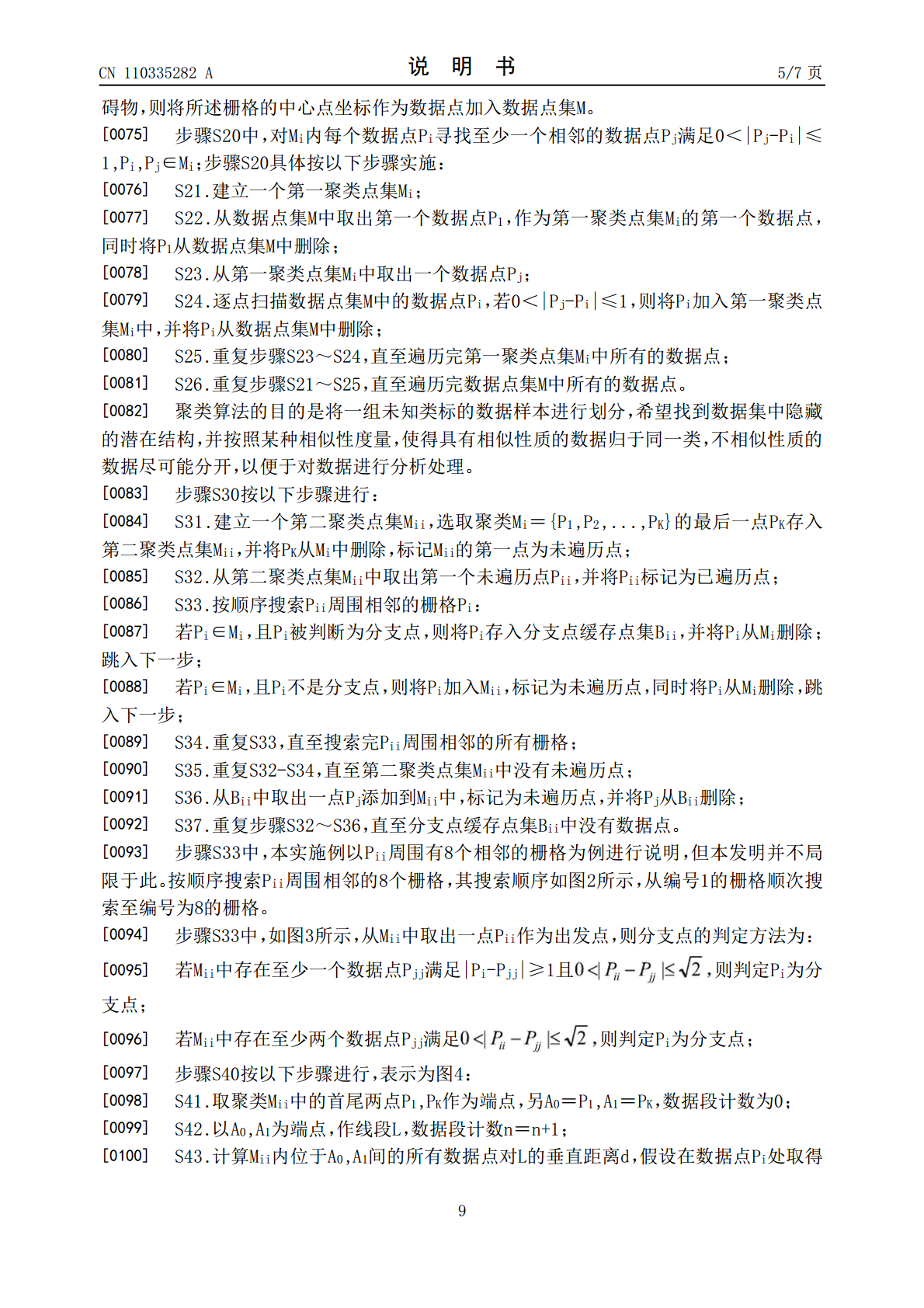
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于栅格的轮廓线段特征提取算法.pdf
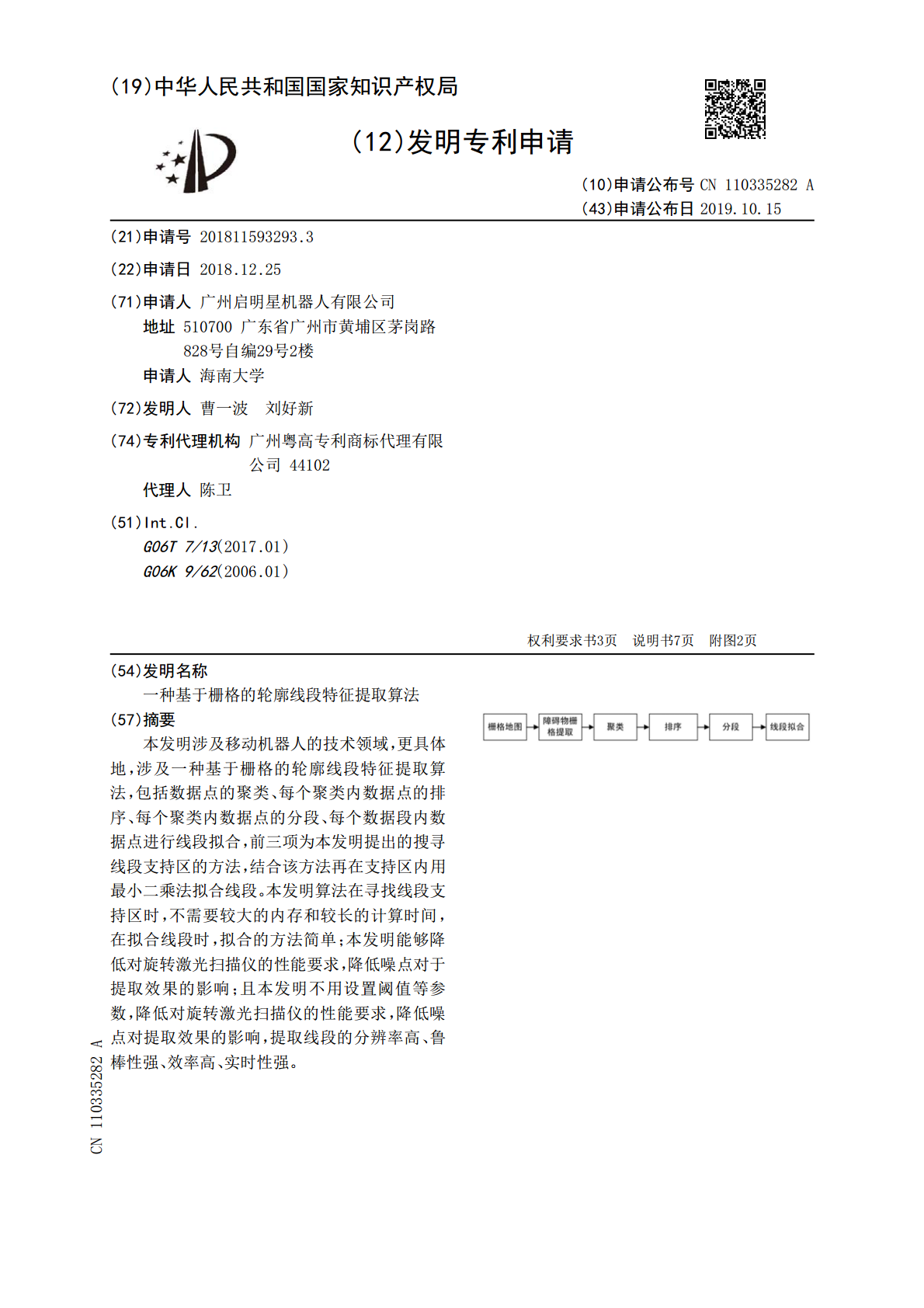
本发明涉及移动机器人的技术领域,更具体地,涉及一种基于栅格的轮廓线段特征提取算法,包括数据点的聚类、每个聚类内数据点的排序、每个聚类内数据点的分段、每个数据段内数据点进行线段拟合,前三项为本发明提出的搜寻线段支持区的方法,结合该方法再在支持区内用最小二乘法拟合线段。本发明算法在寻找线段支持区时,不需要较大的内存和较长的计算时间,在拟合线段时,拟合的方法简单;本发明能够降低对旋转激光扫描仪的性能要求,降低噪点对于提取效果的影响;且本发明不用设置阈值等参数,降低对旋转激光扫描仪的性能要求,降低噪点对提取效果的

基于核范数的鲁棒音阶轮廓特征提取算法.pdf
本发明公开了一种专基于核范数的鲁棒音阶轮廓特征提取算法,步骤1、待输入音乐信号转换;步骤2、对音乐信号进行加窗处理,并进行傅立叶变换,得到音乐信号的时频矩阵,确定起始节拍点;步骤3、利用核范数约束对时频矩阵的秩进行频谱低秩化;同时用一范数约束矩阵中的噪声点,用以下凸优化问题对信号频谱进行低秩化,并去除噪声;步骤4、在迭代约束过程中,利用频谱的低秩特性,实现阈值自适应调整算法;步骤5、对时频矩阵进行有效的降维处理,得到12维的和弦特征。与现有技术相比,本发明提取出了鲁棒性的和弦特征;有效地降低了算法的时间;

汉字轮廓特征提取算法及其实现.pdf
第卷年第月期邵阳学院学报自然科学版...
一种基于卷积轮廓特征的目标跟踪算法.pdf
本发明涉及一种基于卷积轮廓特征的目标跟踪算法,本发明首先在第一帧采集目标的卷积轮廓特征用于构建目标外观摩模型。其次,使用粒子滤波算法在下一帧采集候选样本,并提取出候选样本的卷积轮廓特征。接着,使用已训练好的目标外观模型与候选样本特征进行比对。在进行目标相似性对比时,仅使用目标中比较明亮的部分,这种策略使得算法能够应对跟踪中常遇到的部分遮挡问题。最后,在每一帧跟踪结束时,使用新跟踪到的目标对外观模型进行更新,使得目标外观模型能够适应目标最新的变化。跟踪算法根据上述步骤迭代地对目标进行持续地跟踪。
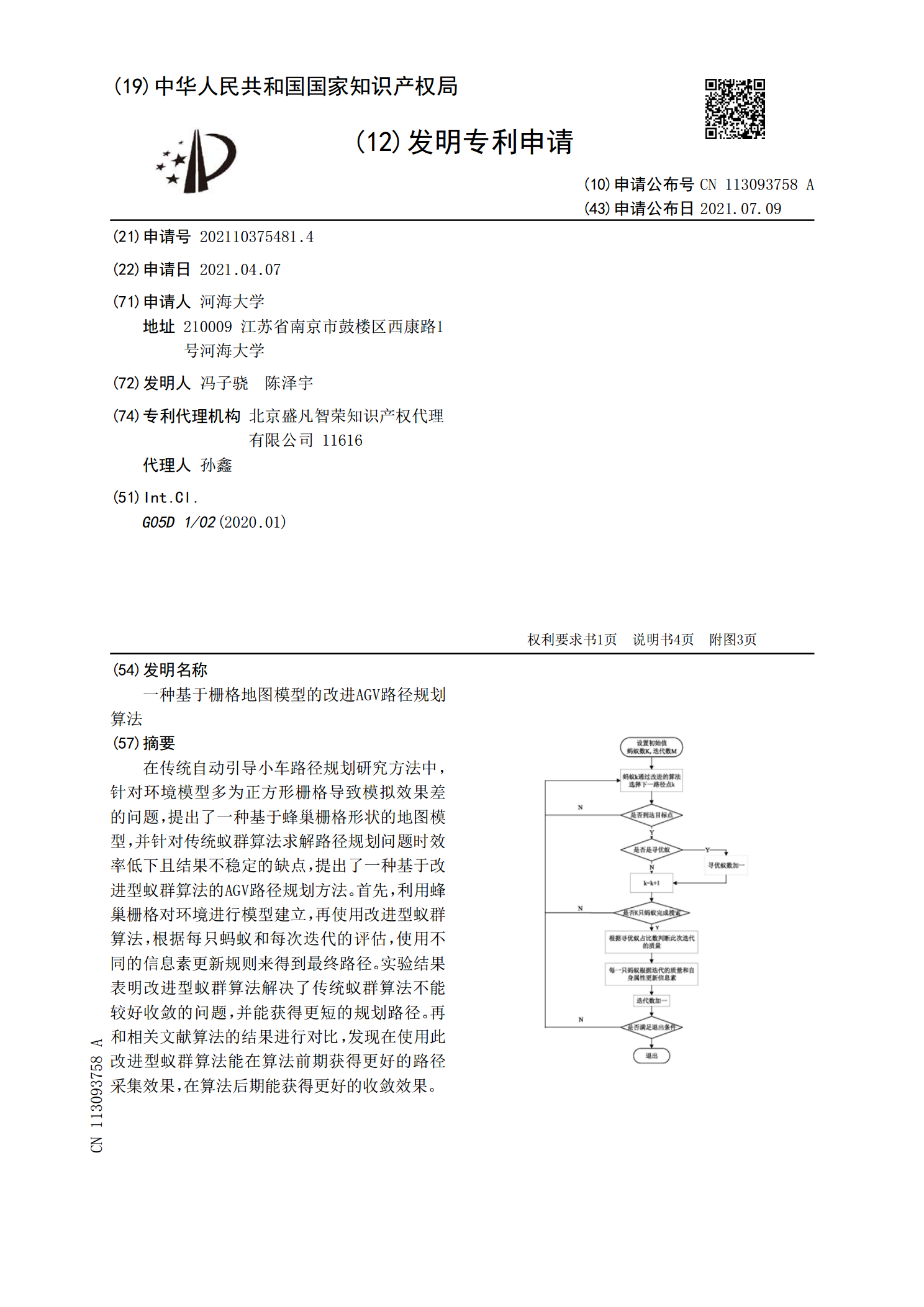
一种基于栅格地图模型的改进AGV路径规划算法.pdf
在传统自动引导小车路径规划研究方法中,针对环境模型多为正方形栅格导致模拟效果差的问题,提出了一种基于蜂巢栅格形状的地图模型,并针对传统蚁群算法求解路径规划问题时效率低下且结果不稳定的缺点,提出了一种基于改进型蚁群算法的AGV路径规划方法。首先,利用蜂巢栅格对环境进行模型建立,再使用改进型蚁群算法,根据每只蚂蚁和每次迭代的评估,使用不同的信息素更新规则来得到最终路径。实验结果表明改进型蚁群算法解决了传统蚁群算法不能较好收敛的问题,并能获得更短的规划路径。再和相关文献算法的结果进行对比,发现在使用此改进型蚁群