
圆柱齿轮啮合刚度计算方法.pdf

甲申****66

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
圆柱齿轮啮合刚度计算方法.pdf
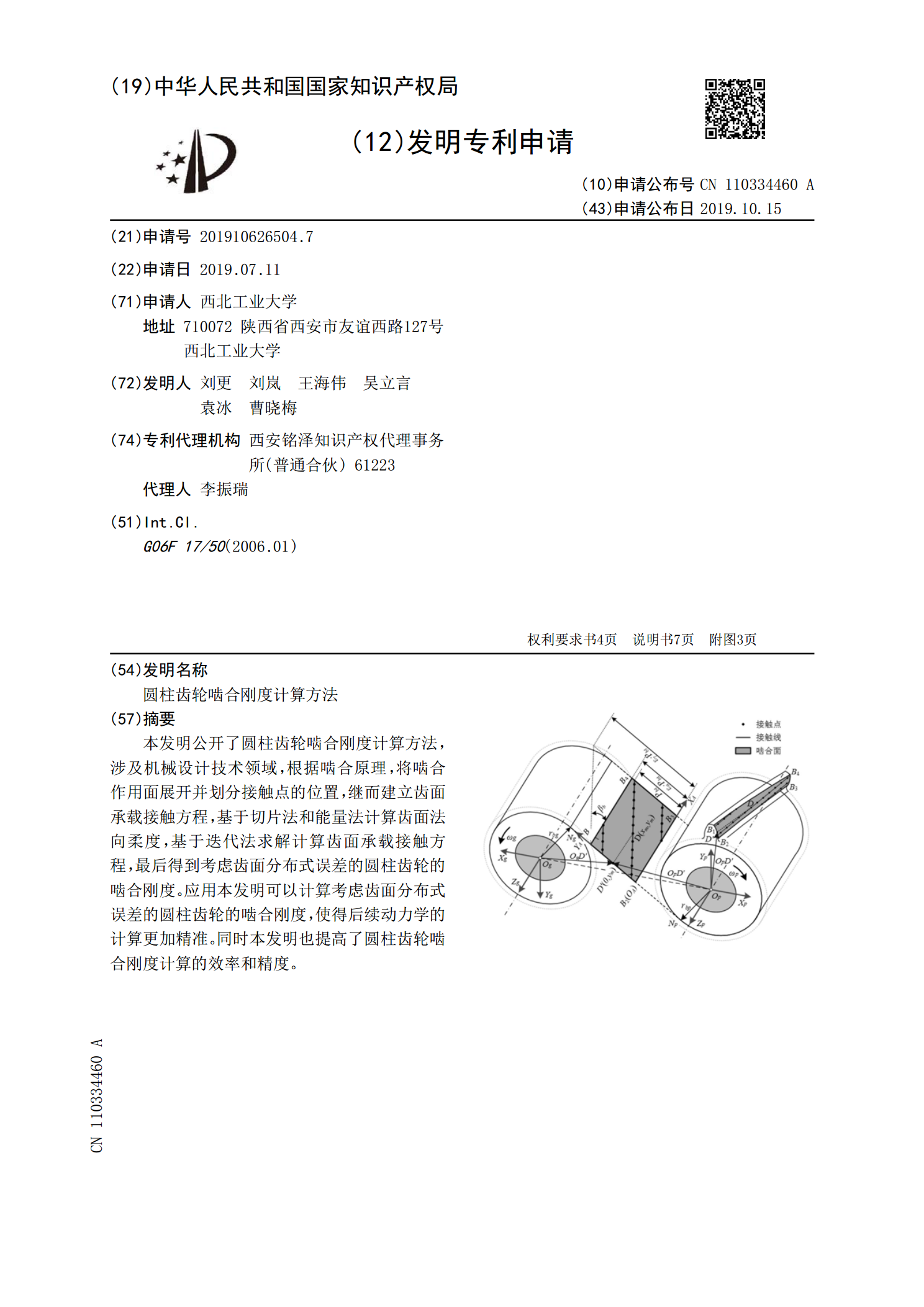
本发明公开了圆柱齿轮啮合刚度计算方法,涉及机械设计技术领域,根据啮合原理,将啮合作用面展开并划分接触点的位置,继而建立齿面承载接触方程,基于切片法和能量法计算齿面法向柔度,基于迭代法求解计算齿面承载接触方程,最后得到考虑齿面分布式误差的圆柱齿轮的啮合刚度。应用本发明可以计算考虑齿面分布式误差的圆柱齿轮的啮合刚度,使得后续动力学的计算更加精准。同时本发明也提高了圆柱齿轮啮合刚度计算的效率和精度。

直齿圆柱齿轮啮合刚度计算方法研究.docx
直齿圆柱齿轮啮合刚度计算方法研究【摘要】直齿圆柱齿轮是常用的传动元件之一,其啮合刚度的准确计算方法对于传动系统的设计和分析具有重要意义。本文通过对直齿圆柱齿轮的结构特点、力学原理和啮合过程进行研究,总结了目前常用的直齿圆柱齿轮啮合刚度计算方法,并对各种方法的优缺点进行了比较和分析。通过对计算结果的验证和实例分析,得出了对于不同情况下的直齿圆柱齿轮啮合刚度计算的建议和指导意见,为齿轮传动的设计和分析提供了理论依据。【关键词】直齿圆柱齿轮;啮合刚度;计算方法;传动系统;设计和分析1.引言直齿圆柱齿轮作为一种重
融合齿距偏差的圆柱齿轮啮合刚度计算方法.pdf
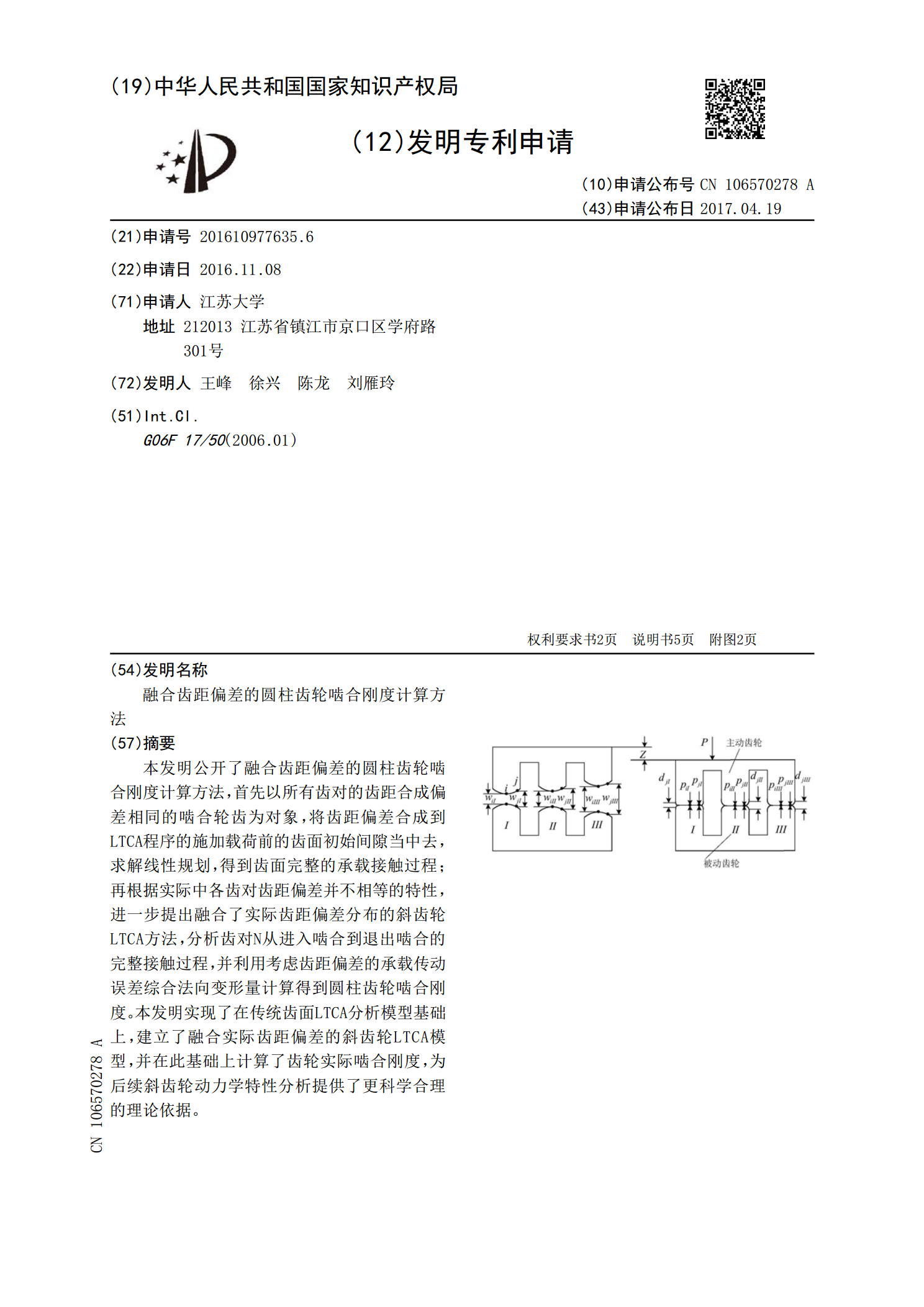
本发明公开了融合齿距偏差的圆柱齿轮啮合刚度计算方法,首先以所有齿对的齿距合成偏差相同的啮合轮齿为对象,将齿距偏差合成到LTCA程序的施加载荷前的齿面初始间隙当中去,求解线性规划,得到齿面完整的承载接触过程;再根据实际中各齿对齿距偏差并不相等的特性,进一步提出融合了实际齿距偏差分布的斜齿轮LTCA方法,分析齿对N从进入啮合到退出啮合的完整接触过程,并利用考虑齿距偏差的承载传动误差综合法向变形量计算得到圆柱齿轮啮合刚度。本发明实现了在传统齿面LTCA分析模型基础上,建立了融合实际齿距偏差的斜齿轮LTCA模型,
一种直齿圆柱齿轮内啮合齿轮副时变啮合刚度的计算方法.pdf
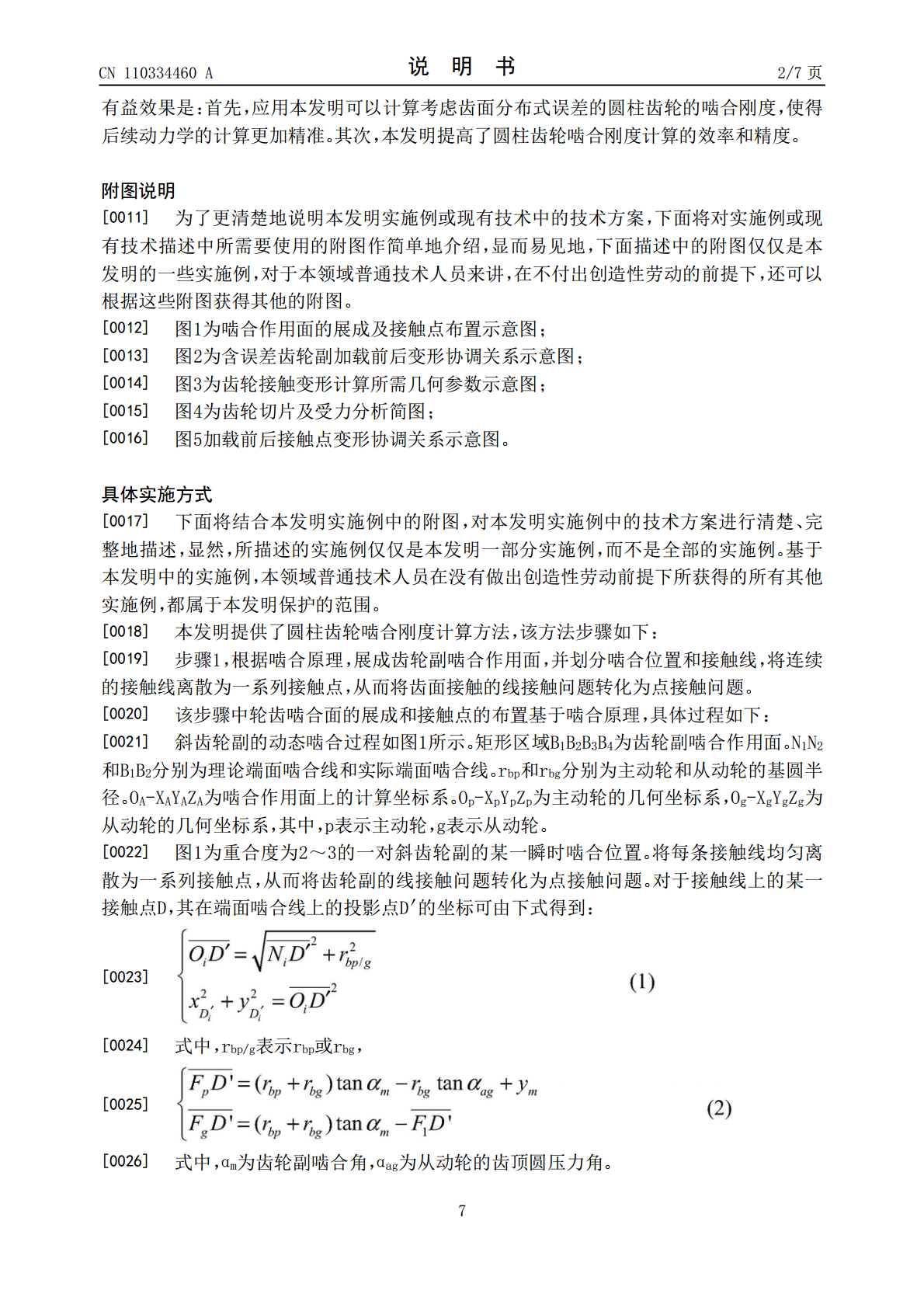
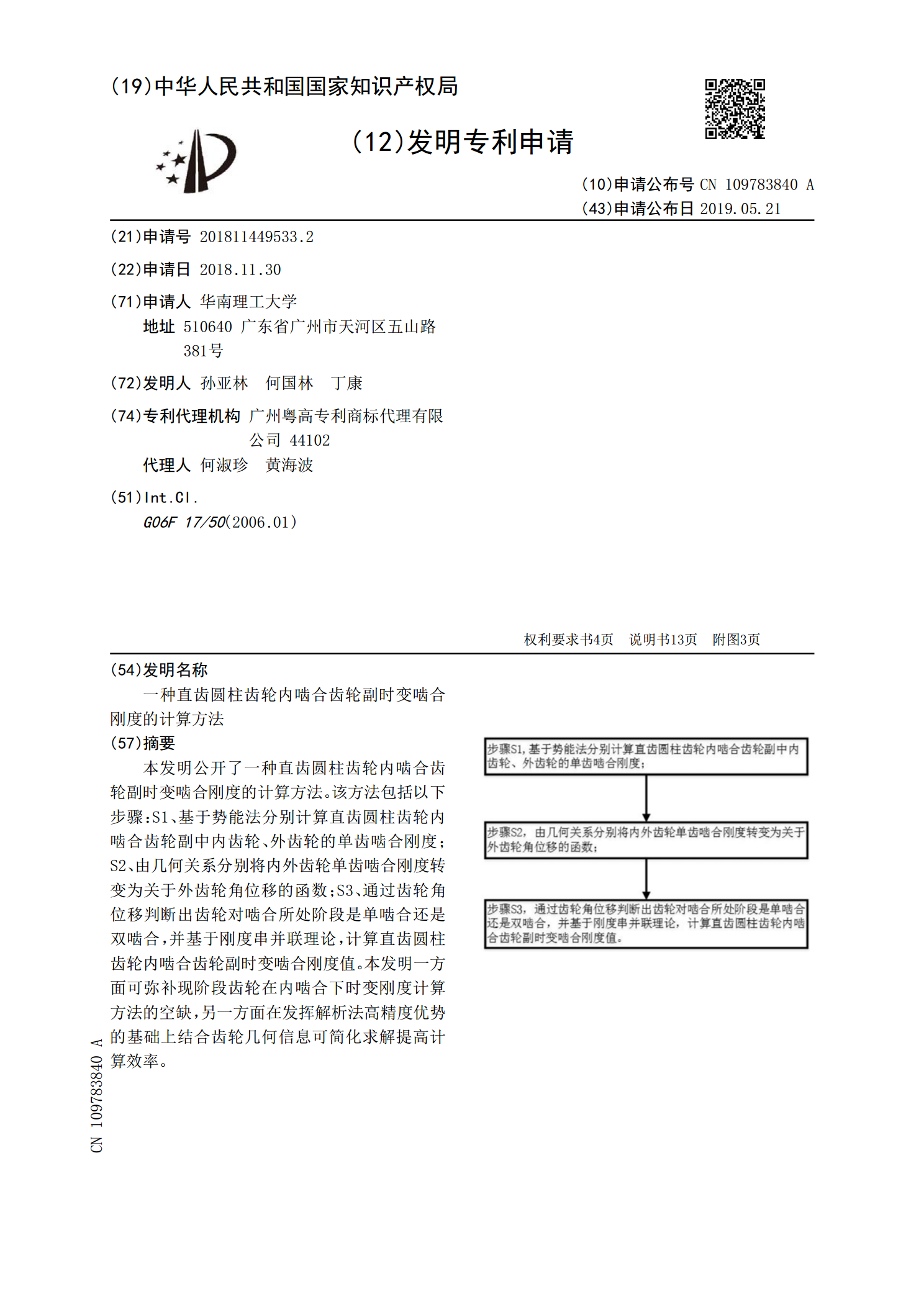
本发明公开了一种直齿圆柱齿轮内啮合齿轮副时变啮合刚度的计算方法。该方法包括以下步骤:S1、基于势能法分别计算直齿圆柱齿轮内啮合齿轮副中内齿轮、外齿轮的单齿啮合刚度;S2、由几何关系分别将内外齿轮单齿啮合刚度转变为关于外齿轮角位移的函数;S3、通过齿轮角位移判断出齿轮对啮合所处阶段是单啮合还是双啮合,并基于刚度串并联理论,计算直齿圆柱齿轮内啮合齿轮副时变啮合刚度值。本发明一方面可弥补现阶段齿轮在内啮合下时变刚度计算方法的空缺,另一方面在发挥解析法高精度优势的基础上结合齿轮几何信息可简化求解提高计算效率。

融合齿背接触机理的高速圆柱齿轮动态啮合刚度计算方法.pdf
本发明公开了融合齿背接触机理的高速圆柱齿轮动态啮合刚度计算方法,属于高速圆柱齿轮传动系统稳定性分析领域。首先由圆柱齿轮传动系统振动模型求得齿面相对振动位移,根据齿面振动位移的取值范围判定齿面的正常啮合/脱啮/齿背接触啮合状态,结合TCA、LTCA程序计算出的轮齿齿面时变啮合刚度,最终得到同时与啮合时间和齿面振动位移相关联的轮齿实时动态啮合刚度。本发明实现了考虑高转速下圆柱齿轮发生脱啮‑齿背啮合状态下,同时计及啮合时间与齿面振动位移的实时动态啮合刚度计算,有助于理清圆柱齿轮齿面振动内部耦合接触机理,为进一步