
一种直齿圆柱齿轮内啮合齿轮副时变啮合刚度的计算方法.pdf

小云****66

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种直齿圆柱齿轮内啮合齿轮副时变啮合刚度的计算方法.pdf
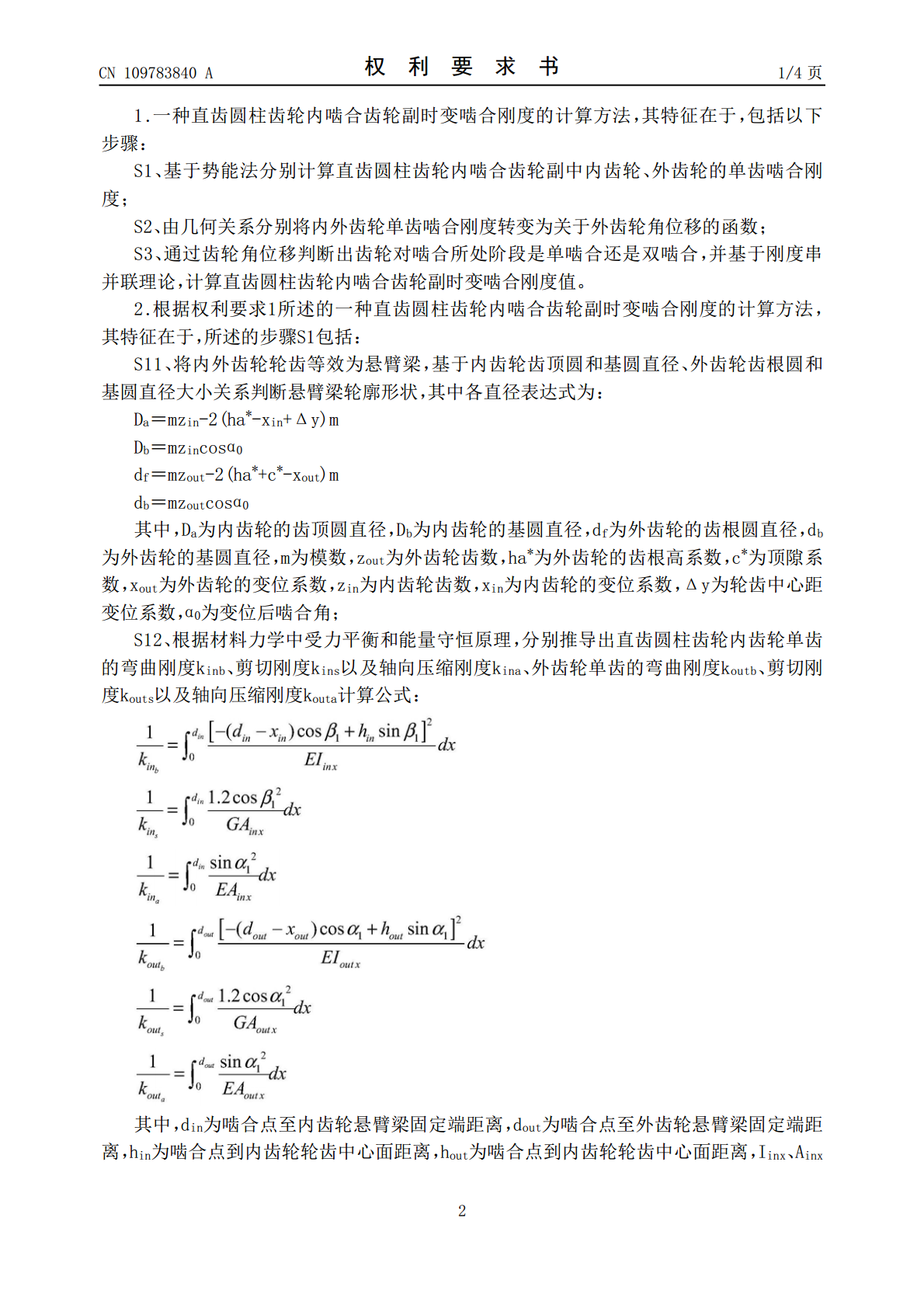
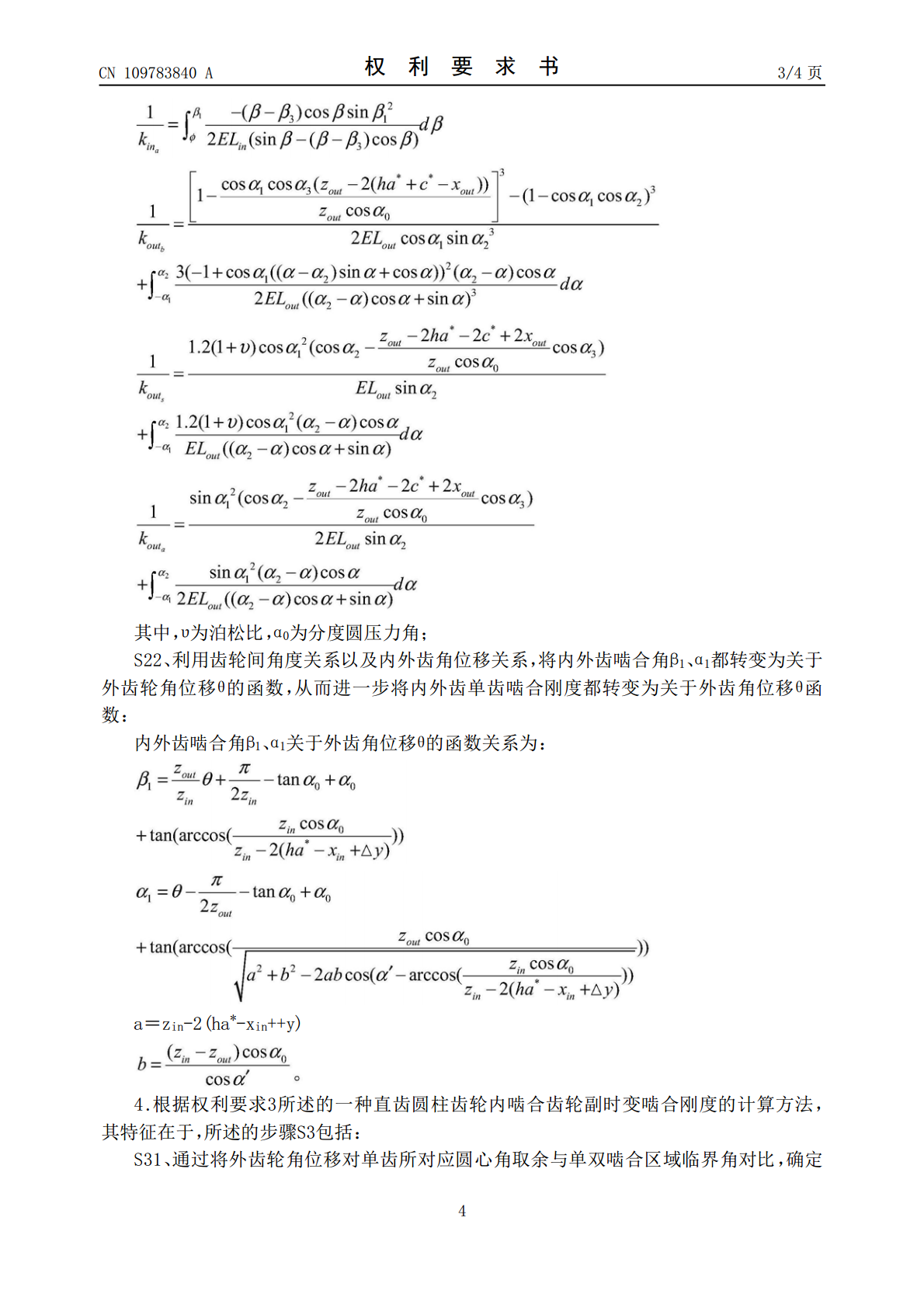
本发明公开了一种直齿圆柱齿轮内啮合齿轮副时变啮合刚度的计算方法。该方法包括以下步骤:S1、基于势能法分别计算直齿圆柱齿轮内啮合齿轮副中内齿轮、外齿轮的单齿啮合刚度;S2、由几何关系分别将内外齿轮单齿啮合刚度转变为关于外齿轮角位移的函数;S3、通过齿轮角位移判断出齿轮对啮合所处阶段是单啮合还是双啮合,并基于刚度串并联理论,计算直齿圆柱齿轮内啮合齿轮副时变啮合刚度值。本发明一方面可弥补现阶段齿轮在内啮合下时变刚度计算方法的空缺,另一方面在发挥解析法高精度优势的基础上结合齿轮几何信息可简化求解提高计算效率。
一种考虑温度影响的直齿圆柱齿轮时变啮合刚度计算方法.pdf
本发明公开了一种考虑温度影响的直齿圆柱齿轮时变啮合刚度计算方法。该方法考虑了齿轮副工作环境温度(稳态环境温度)的影响,根据Coleman理论,计算主动轮/从动轮啮合时摩擦热产生的齿面瞬时温度,推导出齿面接触温度随时间变化的数学表达式;计算齿面接触温度变化导致的主动轮、从动轮轮齿的齿廓热变形,从而计算出温度变化引起的轮齿温度刚度;最终根据刚度串、并联理论,结合轮齿弯曲刚度、剪切刚度、轴向压缩刚度、接触刚度、齿基刚度和温度刚度计算出齿轮时变啮合刚度。

直齿圆柱齿轮啮合刚度计算方法研究.docx
直齿圆柱齿轮啮合刚度计算方法研究【摘要】直齿圆柱齿轮是常用的传动元件之一,其啮合刚度的准确计算方法对于传动系统的设计和分析具有重要意义。本文通过对直齿圆柱齿轮的结构特点、力学原理和啮合过程进行研究,总结了目前常用的直齿圆柱齿轮啮合刚度计算方法,并对各种方法的优缺点进行了比较和分析。通过对计算结果的验证和实例分析,得出了对于不同情况下的直齿圆柱齿轮啮合刚度计算的建议和指导意见,为齿轮传动的设计和分析提供了理论依据。【关键词】直齿圆柱齿轮;啮合刚度;计算方法;传动系统;设计和分析1.引言直齿圆柱齿轮作为一种重
考虑延长啮合和齿圈柔性的内啮合齿轮副啮合刚度计算方法.pdf
本发明公开了一种考虑延长啮合和齿圈柔性的内啮合齿轮副啮合刚度计算方法,它是在基于轮齿刚度和基体刚度计算的基础上,通过轮齿接近距离和分离距离的确定,建立内啮合齿轮副时变啮合刚度解析模型,根据齿圈的几何计算啮合刚度;该内啮合齿轮副啮合刚度计算方法包括以下步骤:步骤1计算轮齿刚度;步骤2计算基体刚度;步骤3计算轮齿分离距离与接近距离;步骤4计算内啮合齿轮副时变啮合刚度。本发明的计算方法考虑了行星齿轮副齿圈变形和延长啮合的影响,提出改进的渐开线齿廓行星齿轮啮合刚度解析模型,具有相当的计算精度,同时也能保证计算效率

齿轮故障对直齿轮副时变啮合刚度的影响研究.docx
齿轮故障对直齿轮副时变啮合刚度的影响研究齿轮是机械传动中常见的元件,其主要作用是将动力从一个轴传递到另一个轴上。齿轮传动通常具有高效率、大扭矩传递能力和较长的使用寿命等优点,因此被广泛应用于机械系统中。然而,由于长时间的使用和外部因素的影响,齿轮传动可能出现各种故障,其中一个常见的问题是齿轮的故障对直齿轮副时变啮合刚度的影响。直齿轮副是最常见的齿轮传动类型之一,在齿轮副中,两个齿轮的齿面直接啮合。啮合过程中,齿面接触载荷和啮合刚度是关键参数,它们决定了齿轮副的传动性能和运动稳定性。而齿轮故障会导致齿面接触