
一种管道清淤机器人.pdf

是笛****加盟

1/8

2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种管道清淤机器人.pdf
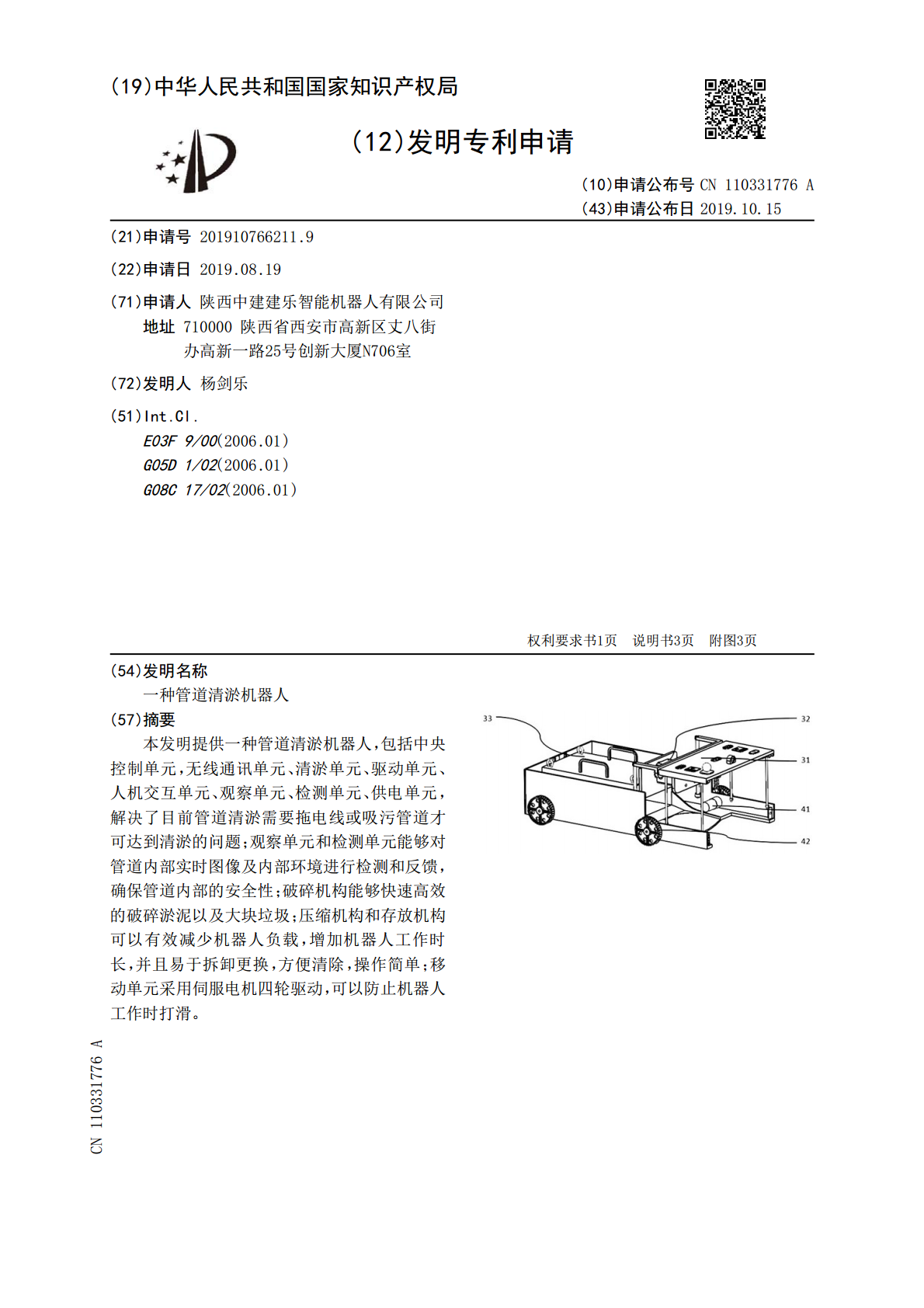
本发明提供一种管道清淤机器人,包括中央控制单元,无线通讯单元、清淤单元、驱动单元、人机交互单元、观察单元、检测单元、供电单元,解决了目前管道清淤需要拖电线或吸污管道才可达到清淤的问题;观察单元和检测单元能够对管道内部实时图像及内部环境进行检测和反馈,确保管道内部的安全性;破碎机构能够快速高效的破碎淤泥以及大块垃圾;压缩机构和存放机构可以有效减少机器人负载,增加机器人工作时长,并且易于拆卸更换,方便清除,操作简单;移动单元采用伺服电机四轮驱动,可以防止机器人工作时打滑。

一种管道清淤机器人.pdf
本发明公开一种管道清淤机器人,包括清理作业单元、六个贴壁角度调整步进电机、六个贴壁爬升步进电机、驱动机架单元、清淤机构步进电机等,其特征在于三组沿径向且两两间距一百二十度地固定安装在所述的驱动机架单元上托盘上,沿另外三组沿径向且两两间距一百二十度地固定在驱动机架单元下托盘上,且恰好与前三组两两间距三十度,所述的清淤机构步进电机固定安装在驱动机架单元上,其轴上齿轮与清理作业单元的转动空心轴啮合,所述的清理作业单元固定在驱动机架单元上端中心;本发明在清淤的基础上增加了白色垃圾收集功能,解决管道堵塞问题,防止清

一种管道清淤机器人.pdf
本发明公开了管道清理技术领域的一种管道清淤机器人,具有壳体、滚轮、驱动轴、电机和连接法兰,所述壳体外壁固定连接有电机,且壳体侧壁嵌入有所述连接法兰,所述电机的输出端连接驱动轴,所述驱动轴的两端连接滚轮,所述套壳一端与所述连接柱一端固定连接,且套壳另一端安装有所述第一步进电机,所述安装座上固定连接有与所述套壳平行的所述照明电筒,所述照明电筒一端下方安装有所述摄像头,所述连接柱另一端固定连接所述清淤箱,所述清淤腔内腔安装有所述排污泵,本发明将堵塞物破碎并排出,防止堵塞物的二次堵塞,同时能在清淤过程中保持机器人
一种管道清淤机器人.pdf
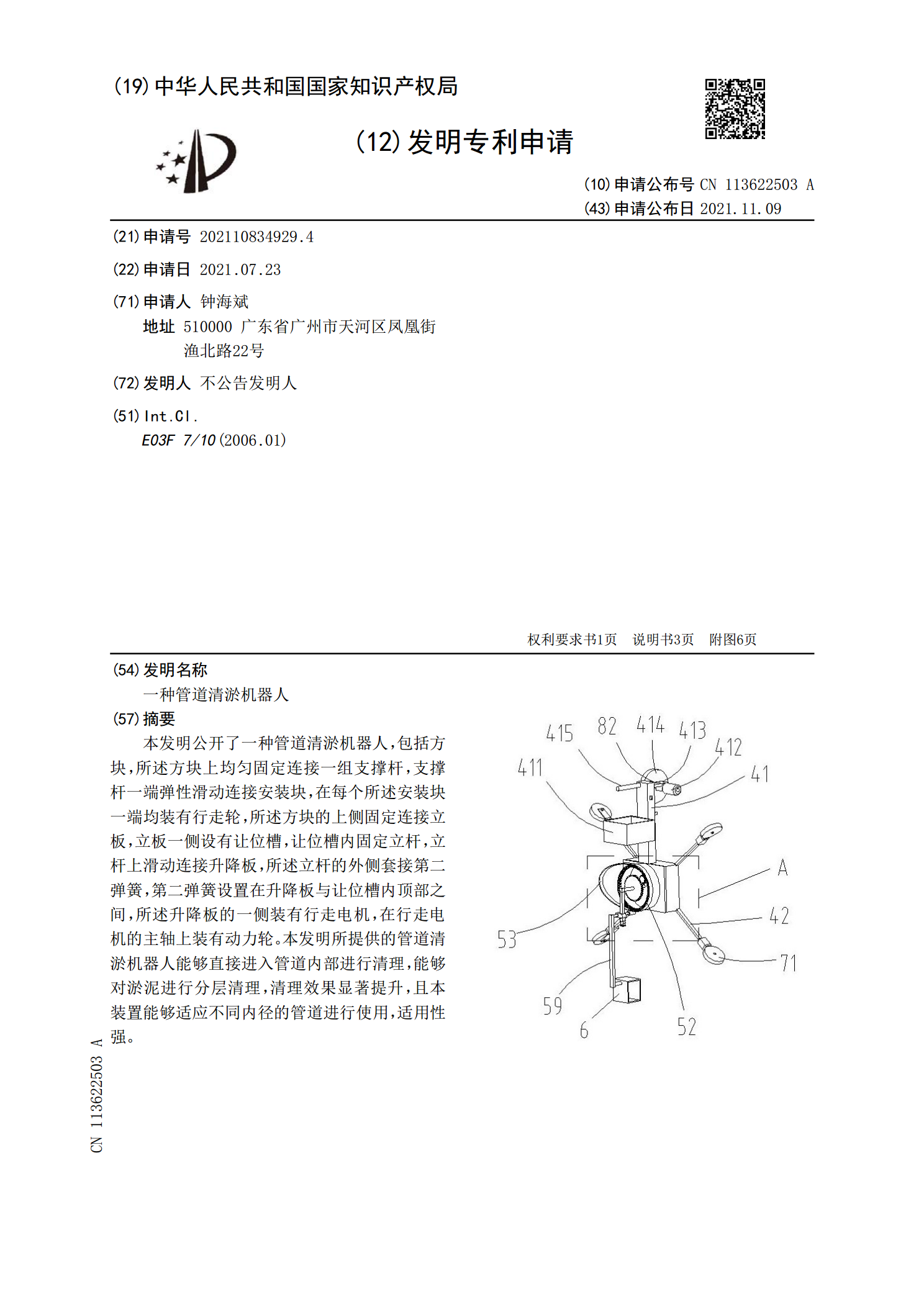
本发明公开了一种管道清淤机器人,包括方块,所述方块上均匀固定连接一组支撑杆,支撑杆一端弹性滑动连接安装块,在每个所述安装块一端均装有行走轮,所述方块的上侧固定连接立板,立板一侧设有让位槽,让位槽内固定立杆,立杆上滑动连接升降板,所述立杆的外侧套接第二弹簧,第二弹簧设置在升降板与让位槽内顶部之间,所述升降板的一侧装有行走电机,在行走电机的主轴上装有动力轮。本发明所提供的管道清淤机器人能够直接进入管道内部进行清理,能够对淤泥进行分层清理,清理效果显著提升,且本装置能够适应不同内径的管道进行使用,适用性强。

一种管道清淤机器人.pdf
本发明公开了一种管道清淤机器人,其包括主车体、副车体和控制器,主车体包括作业组件和推进组件;作业组件的作业箱体两侧设置主动行走装置,作业箱体前端设置扒渣器和高压清洗组件,作业箱体两侧设置主撑壁装置;作业箱体的后部往复移动地插装于推进组件的推进箱体内,推进箱体内设推进机构,推进箱体前端设有推进接头,推进箱体两侧伸缩设置支腿装置,推进箱体两侧设置副撑壁装置;副车体包括副箱体和控制系统,副箱体及推进箱体的两侧均设置从动行走装置,副箱体、推进箱体及作业箱体均设置防水接头。该管道清淤机器人能够高效彻底地实施隧道中心