
一种基于GPS定位的堆取料机防碰撞方法及系统.pdf

努力****甲寅

1/10
2/10
3/10
4/10
5/10
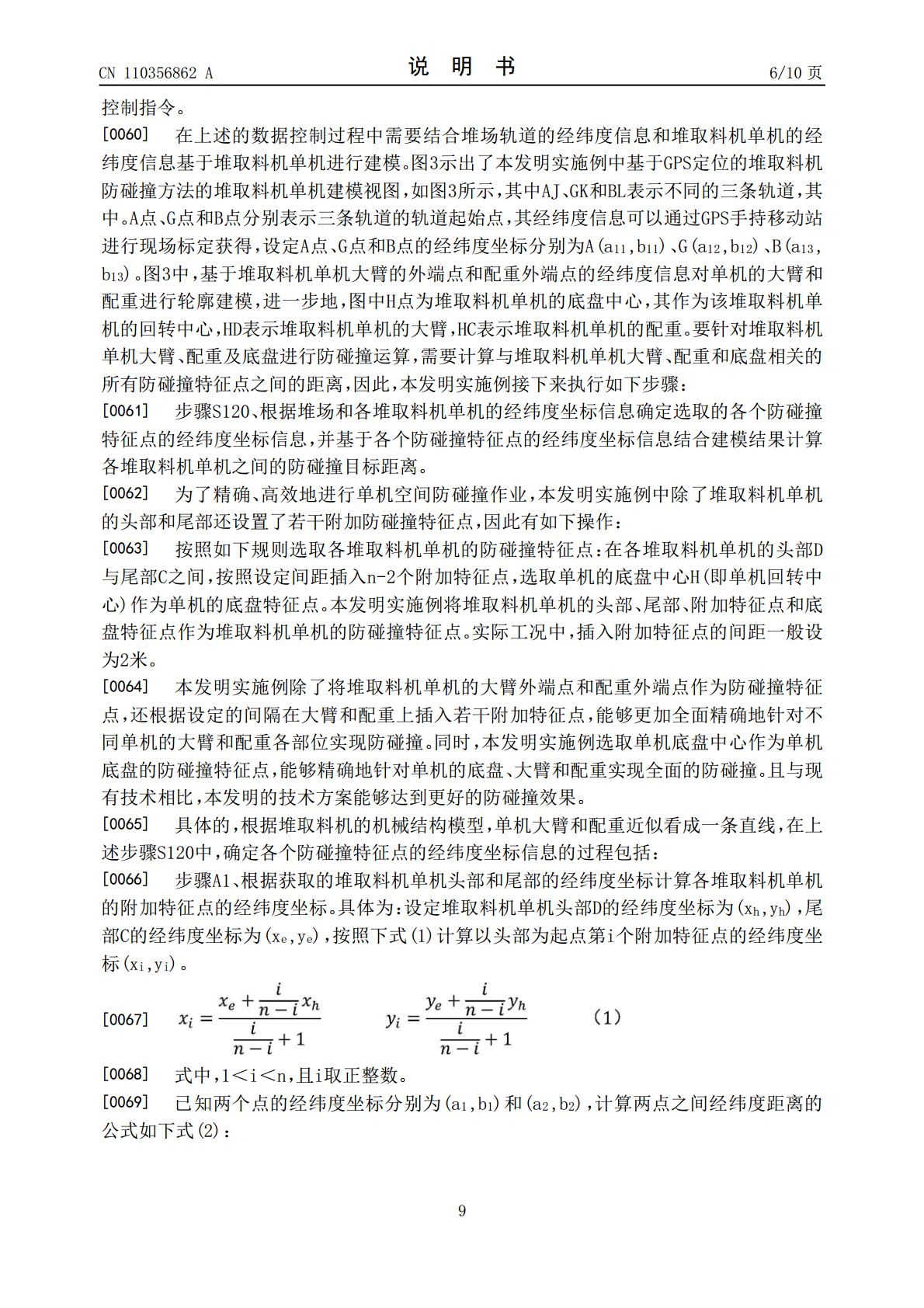
6/10
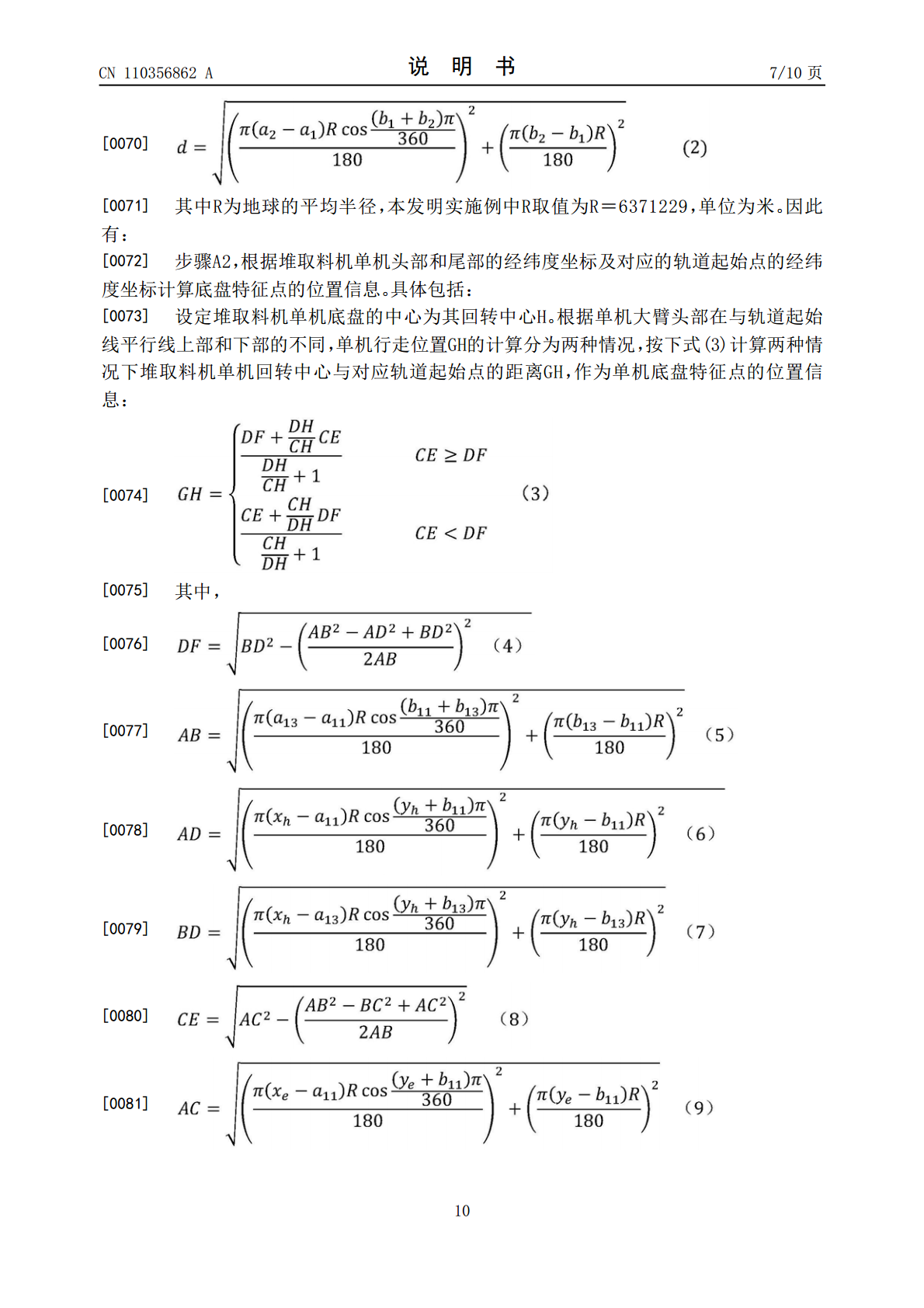
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于GPS定位的堆取料机防碰撞方法及系统.pdf
本发明提供了一种基于GPS定位的堆取料机防碰撞方法及系统,该方法包括:根据获取的堆场和堆取料机单机的经纬度坐标信息分别对各堆取料机单机的大臂和配重进行轮廓建模,然后根据堆场和各单机的经纬度坐标信息计算选取的各防碰撞特征点的经纬度坐标信息,并计算各堆取料机单机之间的防碰撞目标距离,进而根据各堆取料机单机之间的防碰撞目标距离控制对应的堆取料机单机进行无碰撞作业。采用上述技术方案,克服了现有技术中防碰撞计算精确度过低的问题,同时解决了传统方法中计算过程繁琐,数据冗余量大的问题,不仅对单机的底盘、大臂和配重实现全

一种基于OBB矩形碰撞检测算法的堆取料机防碰撞方法.docx
一种基于OBB矩形碰撞检测算法的堆取料机防碰撞方法摘要:堆取料机是一种常用的物料搬运设备,在工业生产过程中扮演着重要的角色。然而,由于机器的速度、加速度、负载等因素的影响,会出现意外碰撞事故,造成设备的损坏或者安全事故的发生。本文提出了一种基于OBB矩形碰撞检测算法的堆取料机防碰撞方法,该方法通过模拟机械臂运动轨迹,实现对堆取料机工作过程中可能发生碰撞的区域进行预测,并通过实时监测设备的状态和反馈信息,实现了对碰撞的良好控制。关键词:堆取料机;防碰撞;OBB矩形碰撞检测算法;模拟机械臂运动轨迹;实时监测;

斗轮堆取料机防碰撞保护的研究.docx
斗轮堆取料机防碰撞保护的研究随着科技的不断发展,机器人技术在现代工业生产中的应用越来越广泛,斗轮堆取料机也成为了现代工业生产中不可或缺的一部分。然而,在斗轮堆取料机的操作过程中,碰撞现象时有发生,严重影响了生产效率。因此,斗轮堆取料机防碰撞保护的研究显得尤为重要。一、斗轮堆取料机的工作原理斗轮堆取料机,即斗轮堆取料系统,工作原理是通过开车前端装置,即斗轮器,对破碎的岩石进行取料,然后将大块岩石转移到卸料机构,再通过机械手臂扔到矿石运输车上。该系统由斗轮架、传动装置、斗轮、卸料机构、机械手臂等多个部分组成。
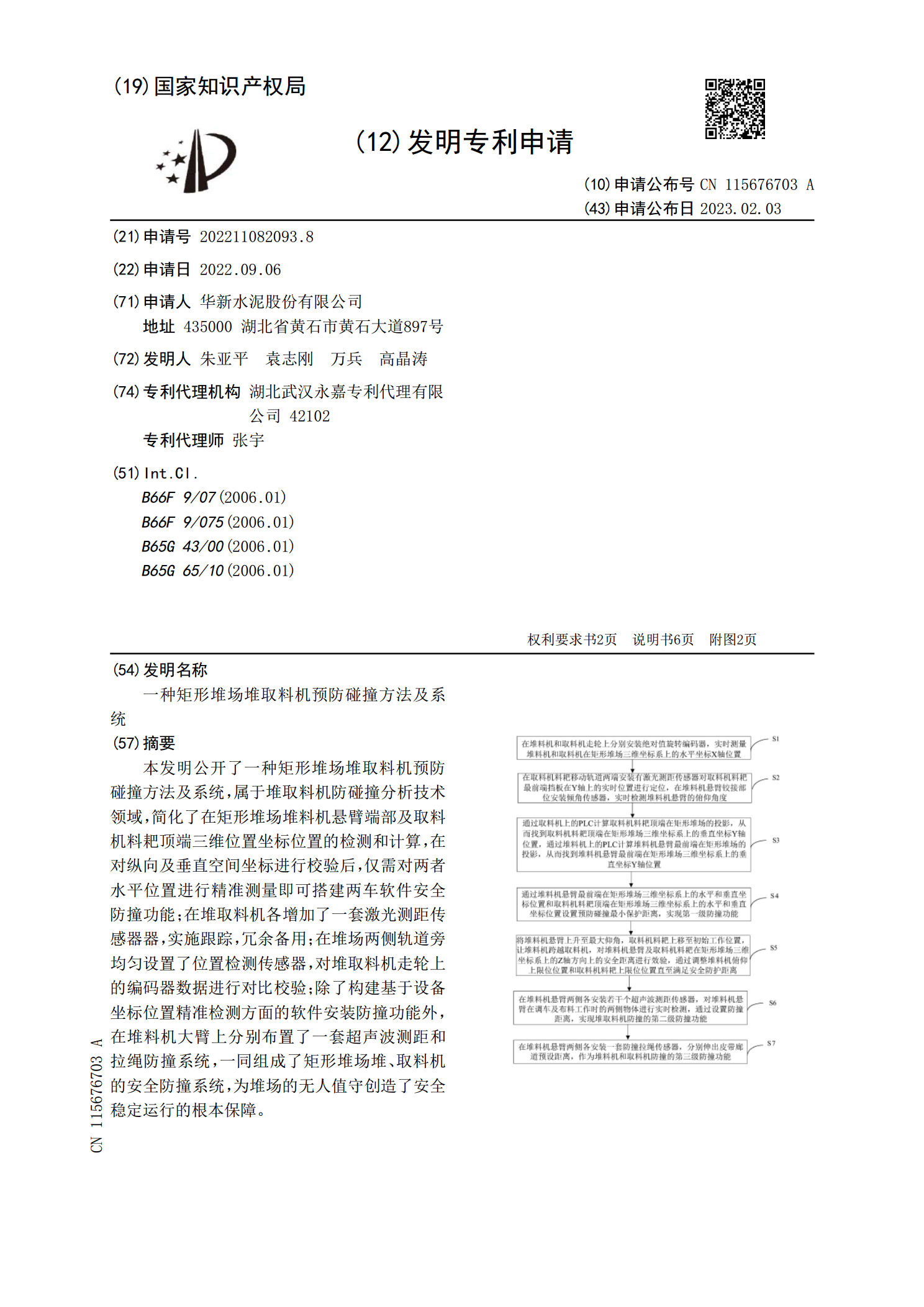
一种矩形堆场堆取料机预防碰撞方法及系统.pdf
本发明公开了一种矩形堆场堆取料机预防碰撞方法及系统,属于堆取料机防碰撞分析技术领域,简化了在矩形堆场堆料机悬臂端部及取料机料耙顶端三维位置坐标位置的检测和计算,在对纵向及垂直空间坐标进行校验后,仅需对两者水平位置进行精准测量即可搭建两车软件安全防撞功能;在堆取料机各增加了一套激光测距传感器器,实施跟踪,冗余备用;在堆场两侧轨道旁均匀设置了位置检测传感器,对堆取料机走轮上的编码器数据进行对比校验;除了构建基于设备坐标位置精准检测方面的软件安装防撞功能外,在堆料机大臂上分别布置了一套超声波测距和拉绳防撞系统,

浅析煤炭码头堆场堆、取料机防碰撞设计理论.docx
浅析煤炭码头堆场堆、取料机防碰撞设计理论煤炭码头堆场堆、取料机是煤炭仓储和物流操作的重要部分,其操作安全涉及到煤炭生产和运输环节的安全性。然而,由于堆场堆取料机操作的复杂性和煤炭的特性,防碰撞设计理论显得尤为重要。本篇论文将从煤炭码头堆场堆、取料机的结构和工作原理出发,深入探讨如何设计有效的防碰撞措施。一、煤炭码头堆场堆、取料机的结构和工作原理煤炭堆场和取料机的主要结构包括堆场区、堆取料机、输送带等。其中,堆场区通常分为堆场、出库口和进口道。进口道是煤炭的主要通道,也是堆积煤炭的地方。堆场是指堆放煤炭的平