
一种灵活移动的益智类儿童玩具机器人.pdf

含平****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种灵活移动的益智类儿童玩具机器人.pdf
本发明公开了一种灵活移动的益智类儿童玩具机器人,其结构包括固移装置、机器人主体、功能按键、扬声区、臂杆、视频区。有益效果:本发明利用设有的衔接件与杂黏结构的相互配合,对移动轮表面卡有的砂砾在弧形气囊呈充气下拉与凸粒的相互摩擦作用下,将其砂砾粘附在凸粒表面,以此实现移动轮表面的整洁,避免其在行驶过程中因该砂砾而导致机器人倾倒,摔坏,本发明通过十字孔表面设有的开闭硅胶片其在弧形气囊下拉的作用下其呈开口状,从而将经由凸粒粘附的砂砾吸收进内,以此避免该砂砾再次落入移动轮内。

一种较灵活的滚轮式机器人移动.pdf
本发明公开了一种较灵活的滚轮式机器人移动,包括放置箱、底座及转动台,所述底座设置在放置箱的顶部,并与放置箱通过螺丝固定连接,所述放置箱的底部四角安装有万向轮,该种较灵活的滚轮式机器人移动,与传统的机器人相比较,不仅可以实现移动,还可以实现水平方向的转动和竖直高度的调节,该机器人中的第二转动轴可以带动转动台实现360度无死角转动,设置在转动臂中的第一转动轴可以使转动臂在不同的高度工作,当机器人要经过狭小空间时,可以通过第二液压伸缩轴把连接板拉回至放置箱中,减小其体积,以便于通过,大大增加了机器人的工作范围,
一种灵活转弯的移动式清洁机器人.pdf
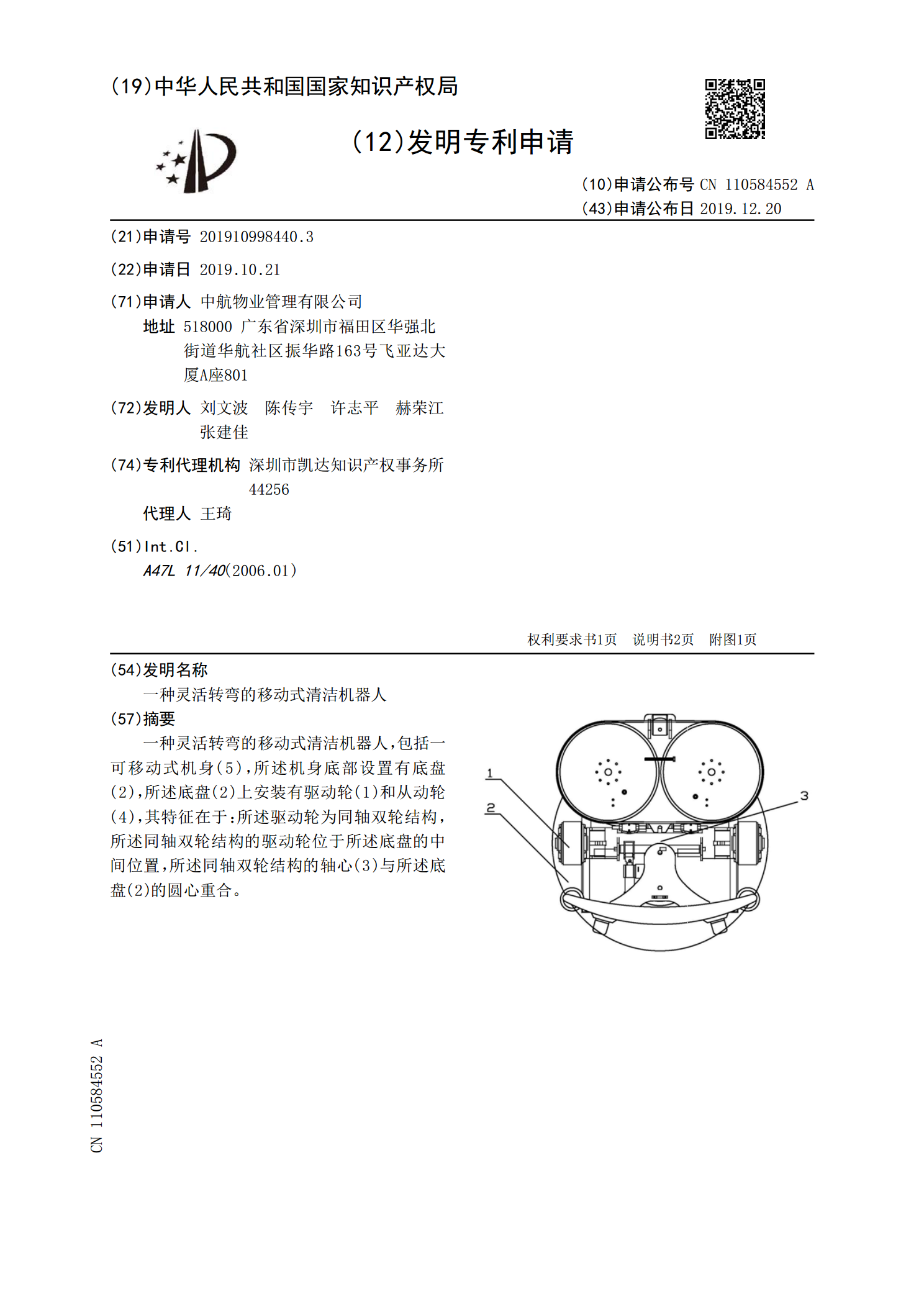
一种灵活转弯的移动式清洁机器人,包括一可移动式机身(5),所述机身底部设置有底盘(2),所述底盘(2)上安装有驱动轮(1)和从动轮(4),其特征在于:所述驱动轮为同轴双轮结构,所述同轴双轮结构的驱动轮位于所述底盘的中间位置,所述同轴双轮结构的轴心(3)与所述底盘(2)的圆心重合。

一种级联多移动机器人灵活编队方法.pdf
本发明提供了一种级联多移动机器人灵活编队方法,该方法基于结合先验的非线性距离‑角度‑航向编队控制知识与连续控制的策略梯度算法,避免移动机器人盲目探索,提高了训练收敛的速度,避免了繁琐的系数调优过程,同时引入近端策略优化独立训练单个移动机器人应对局部静态、动态障碍物的灵活避障能力。该方法分为训练与推理阶段,将复杂的线上解算过程迁移到线下,基于课程学习思想独立训练编队与灵活避障策略,同时在推理环节灵活调用预训练策略,使得整个编队具有更高的自主性与灵活性。

一种可灵活进行多姿态运动的移动机器人.pdf
一种可灵活进行多姿态运动的移动机器人,包括主体和用于驱动主体移动的驱动机构;主体包括外壳和透明内壳,外壳的内壁上固定设置有至少三个第二限位器,第二限位器与透明内壳滚动接触,透明内壳的底部从外壳的底部伸出,外壳内壁的顶点上还固定设置有第二永磁体;驱动机构包括设置在透明内壳内部的主驱动单元和设置在外壳外部的副驱动单元;主驱动单元包括支撑架,支撑架的下部固转动设置两个驱动轮,驱动轮与透明内壳相接触,支撑架上还固定设置有第一永磁体,第一永磁体与第二永磁体相互吸引;副驱动单元包括固定设置在外壳上的伺服电机,伺服电机