
一种水面垃圾吸附清污船.pdf

努力****爱敏


1/9

2/9
3/9

4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种水面垃圾吸附清污船.pdf
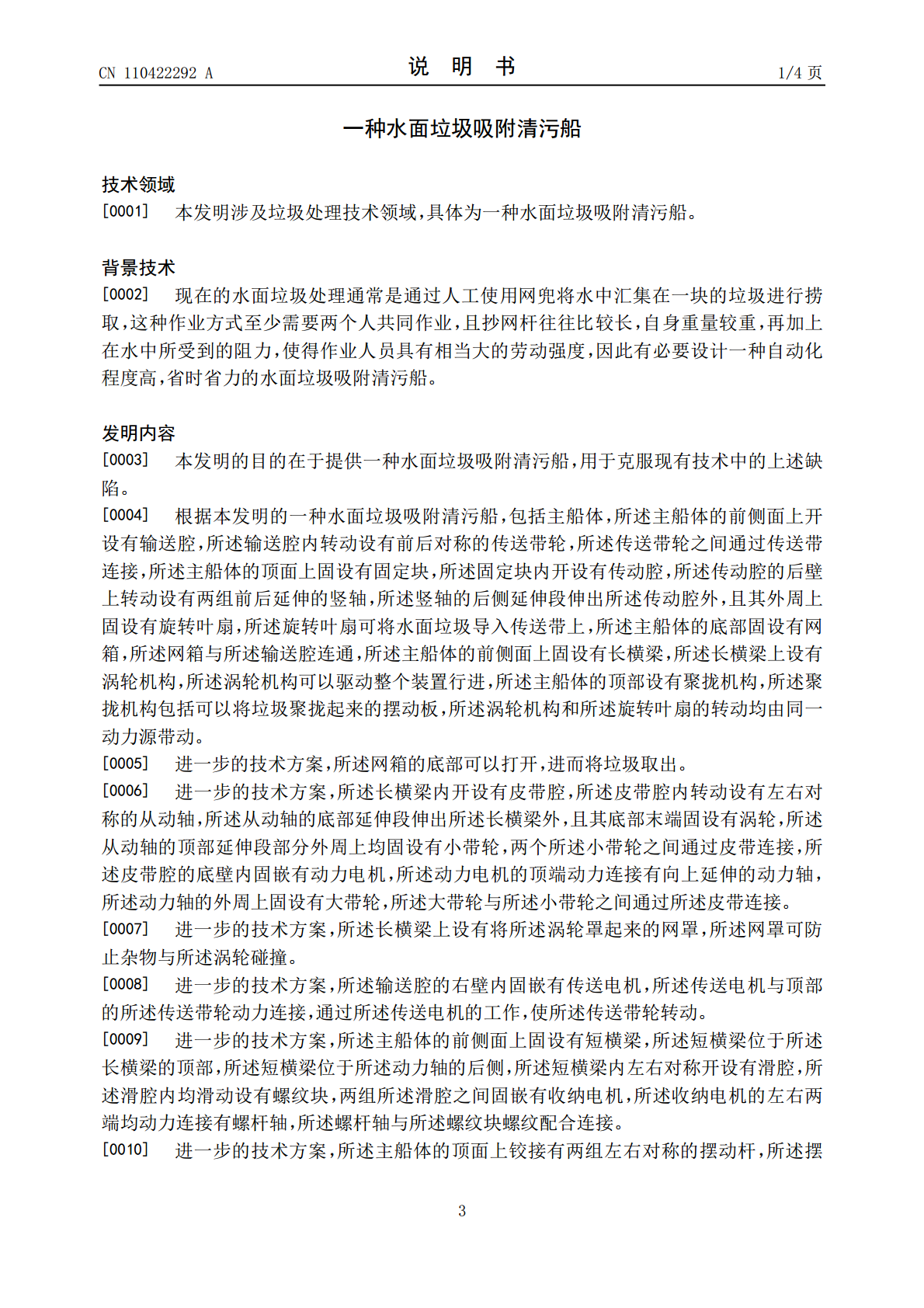
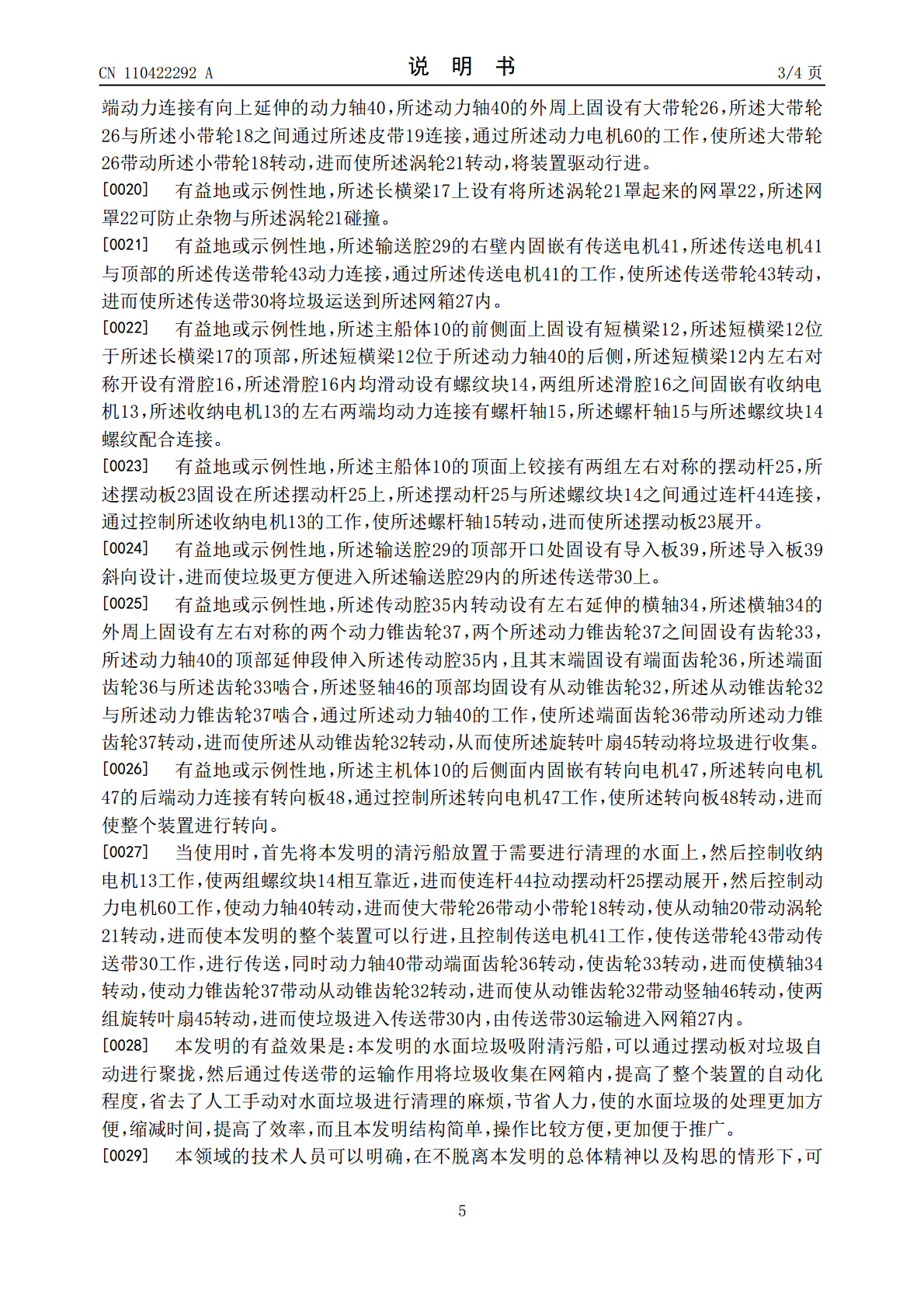
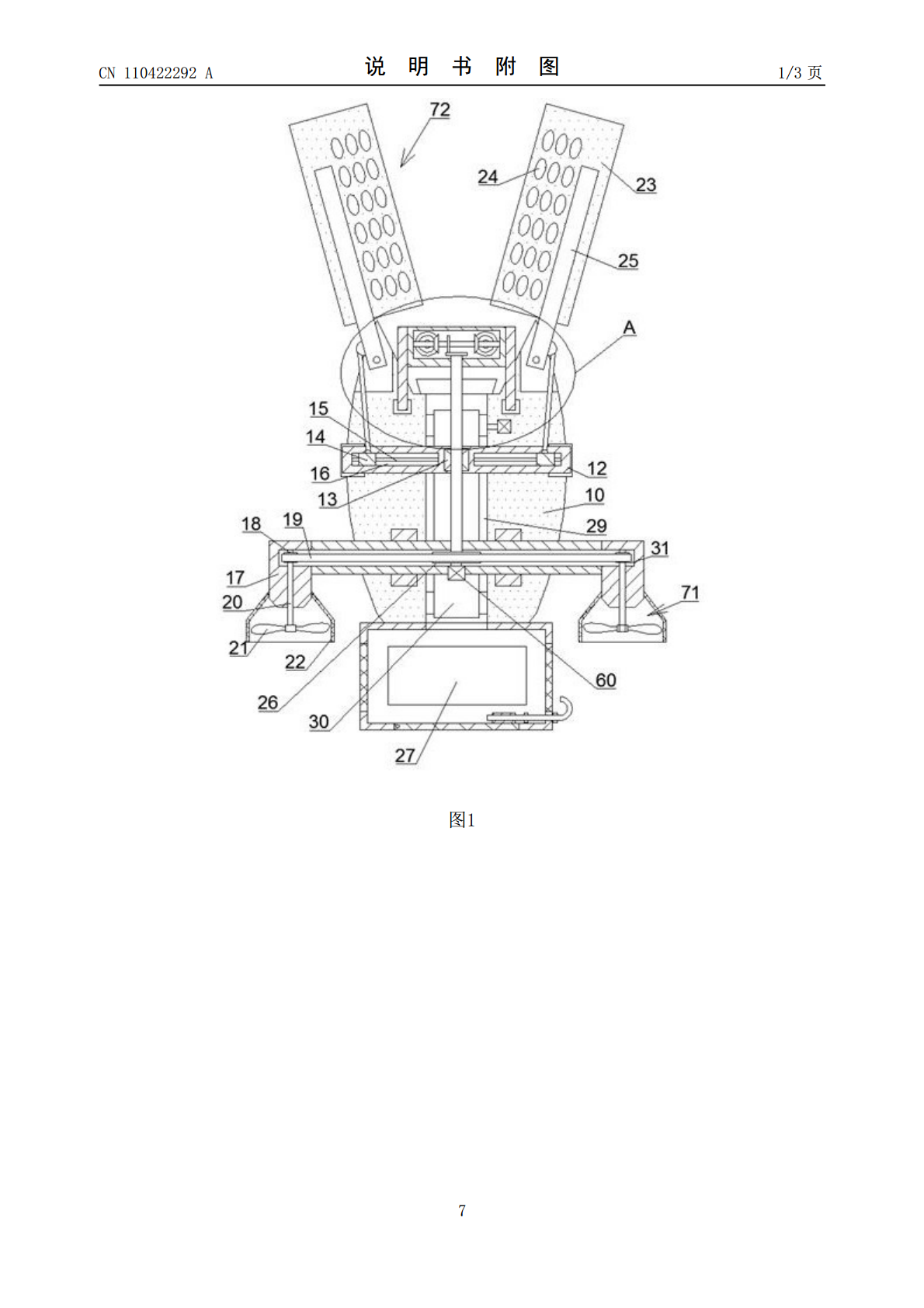
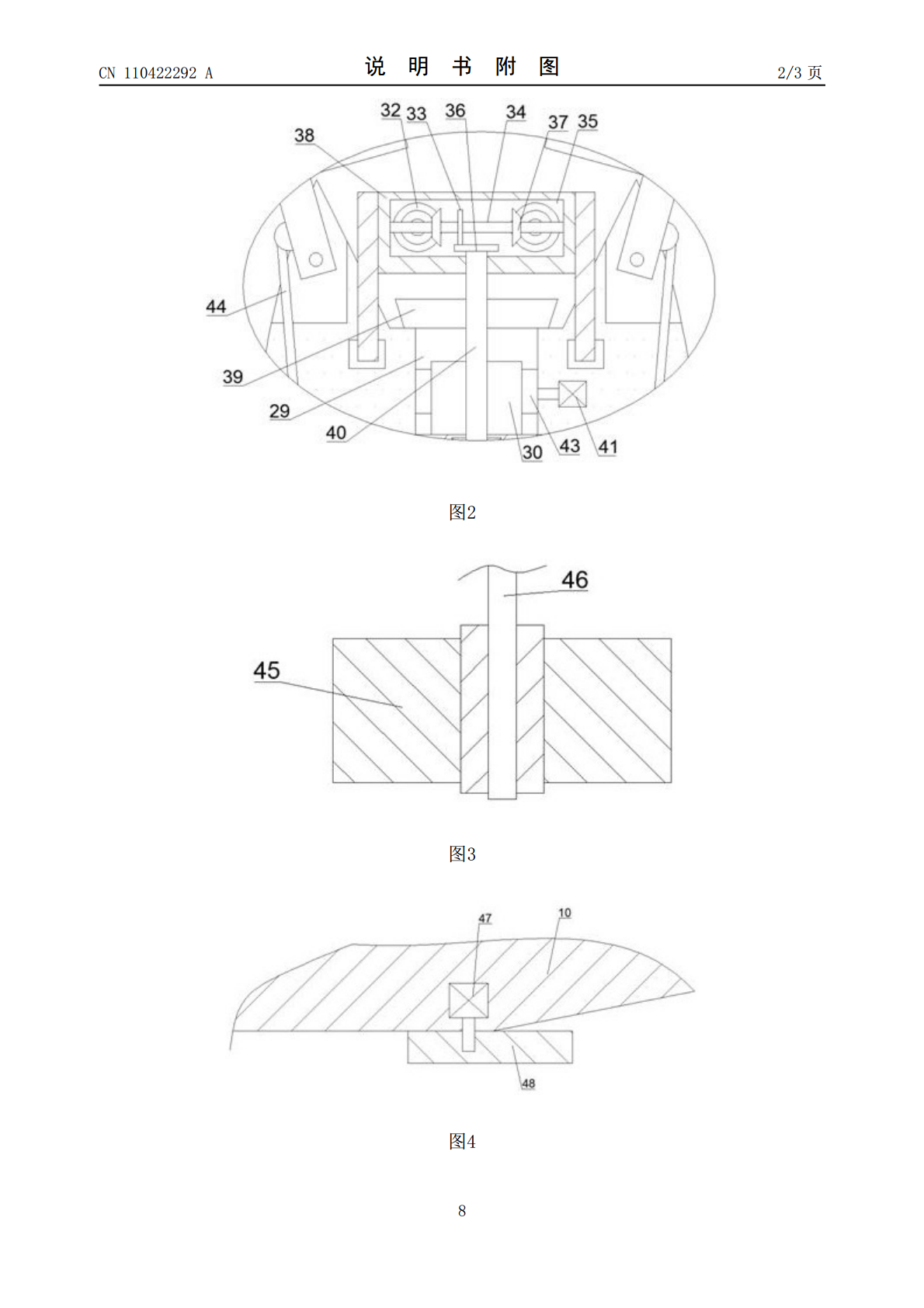
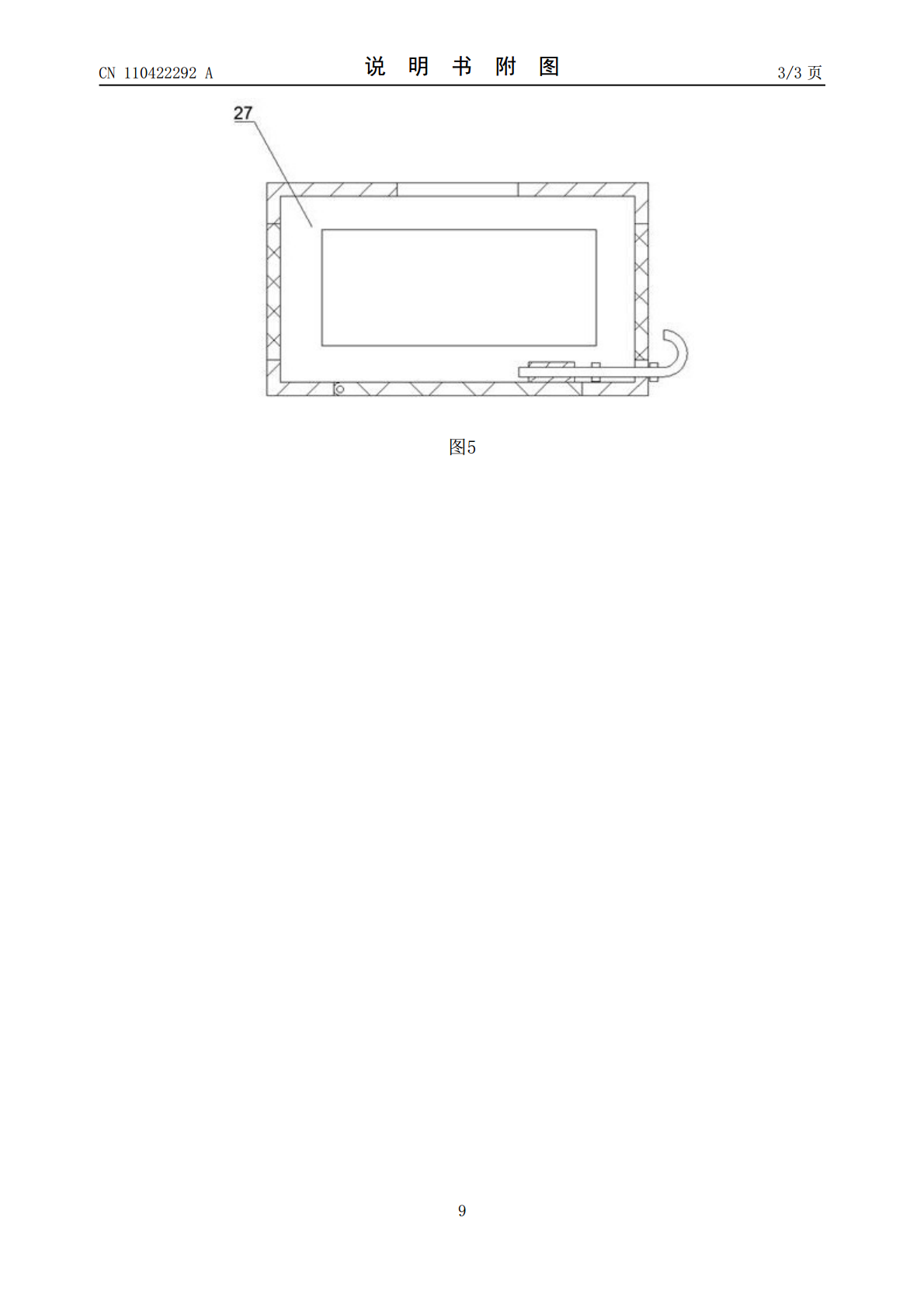
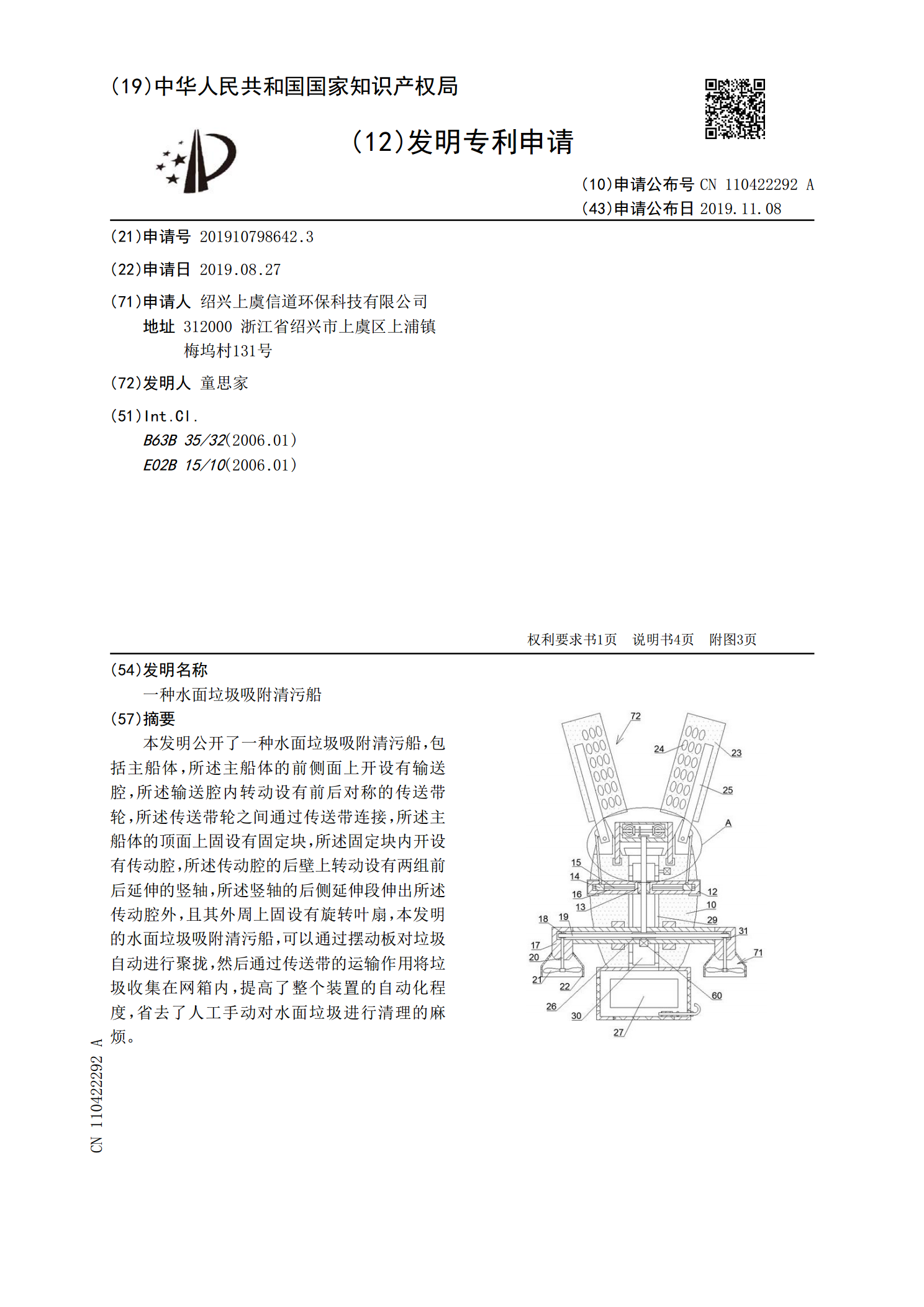
本发明公开了一种水面垃圾吸附清污船,包括主船体,所述主船体的前侧面上开设有输送腔,所述输送腔内转动设有前后对称的传送带轮,所述传送带轮之间通过传送带连接,所述主船体的顶面上固设有固定块,所述固定块内开设有传动腔,所述传动腔的后壁上转动设有两组前后延伸的竖轴,所述竖轴的后侧延伸段伸出所述传动腔外,且其外周上固设有旋转叶扇,本发明的水面垃圾吸附清污船,可以通过摆动板对垃圾自动进行聚拢,然后通过传送带的运输作用将垃圾收集在网箱内,提高了整个装置的自动化程度,省去了人工手动对水面垃圾进行清理的麻烦。
一种船式水面清污设备.pdf
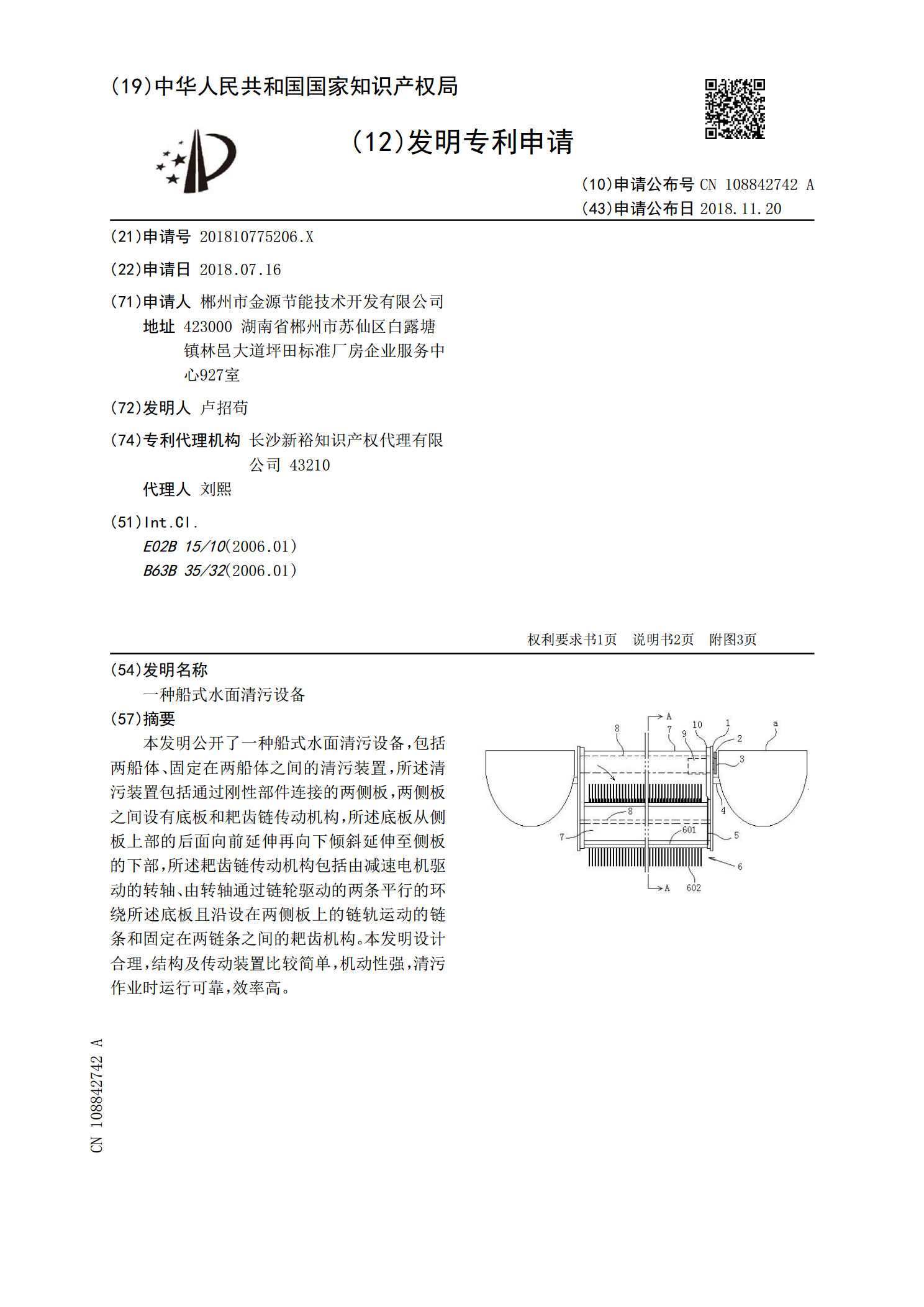
本发明公开了一种船式水面清污设备,包括两船体、固定在两船体之间的清污装置,所述清污装置包括通过刚性部件连接的两侧板,两侧板之间设有底板和耙齿链传动机构,所述底板从侧板上部的后面向前延伸再向下倾斜延伸至侧板的下部,所述耙齿链传动机构包括由减速电机驱动的转轴、由转轴通过链轮驱动的两条平行的环绕所述底板且沿设在两侧板上的链轨运动的链条和固定在两链条之间的耙齿机构。本发明设计合理,结构及传动装置比较简单,机动性强,清污作业时运行可靠,效率高。
一种具有水面水下清污功能的河道清污船.pdf
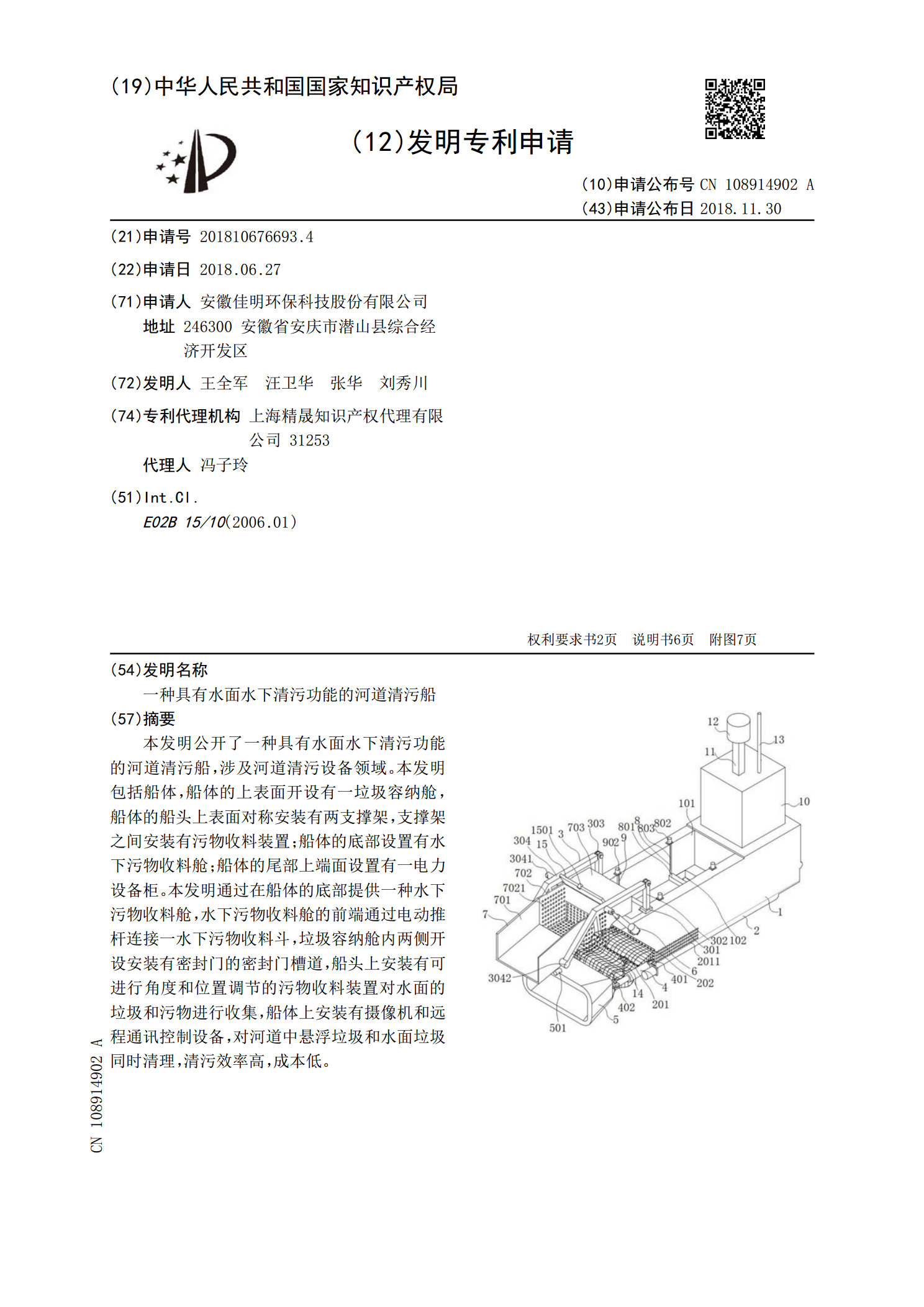
本发明公开了一种具有水面水下清污功能的河道清污船,涉及河道清污设备领域。本发明包括船体,船体的上表面开设有一垃圾容纳舱,船体的船头上表面对称安装有两支撑架,支撑架之间安装有污物收料装置;船体的底部设置有水下污物收料舱;船体的尾部上端面设置有一电力设备柜。本发明通过在船体的底部提供一种水下污物收料舱,水下污物收料舱的前端通过电动推杆连接一水下污物收料斗,垃圾容纳舱内两侧开设安装有密封门的密封门槽道,船头上安装有可进行角度和位置调节的污物收料装置对水面的垃圾和污物进行收集,船体上安装有摄像机和远程通讯控制设备
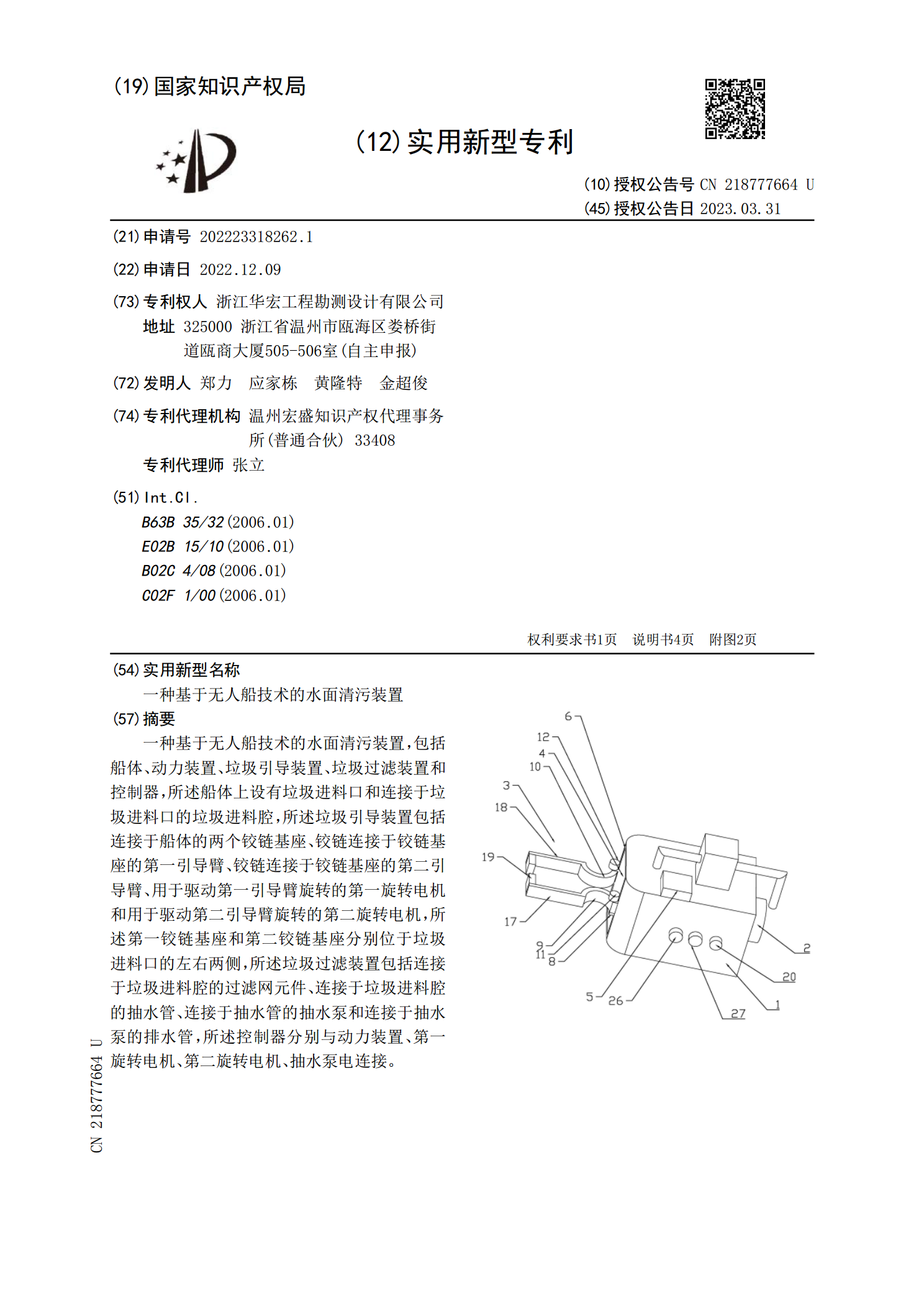
一种基于无人船技术的水面清污装置.pdf
一种基于无人船技术的水面清污装置,包括船体、动力装置、垃圾引导装置、垃圾过滤装置和控制器,所述船体上设有垃圾进料口和连接于垃圾进料口的垃圾进料腔,所述垃圾引导装置包括连接于船体的两个铰链基座、铰链连接于铰链基座的第一引导臂、铰链连接于铰链基座的第二引导臂、用于驱动第一引导臂旋转的第一旋转电机和用于驱动第二引导臂旋转的第二旋转电机,所述第一铰链基座和第二铰链基座分别位于垃圾进料口的左右两侧,所述垃圾过滤装置包括连接于垃圾进料腔的过滤网元件、连接于垃圾进料腔的抽水管、连接于抽水管的抽水泵和连接于抽水泵的排水管
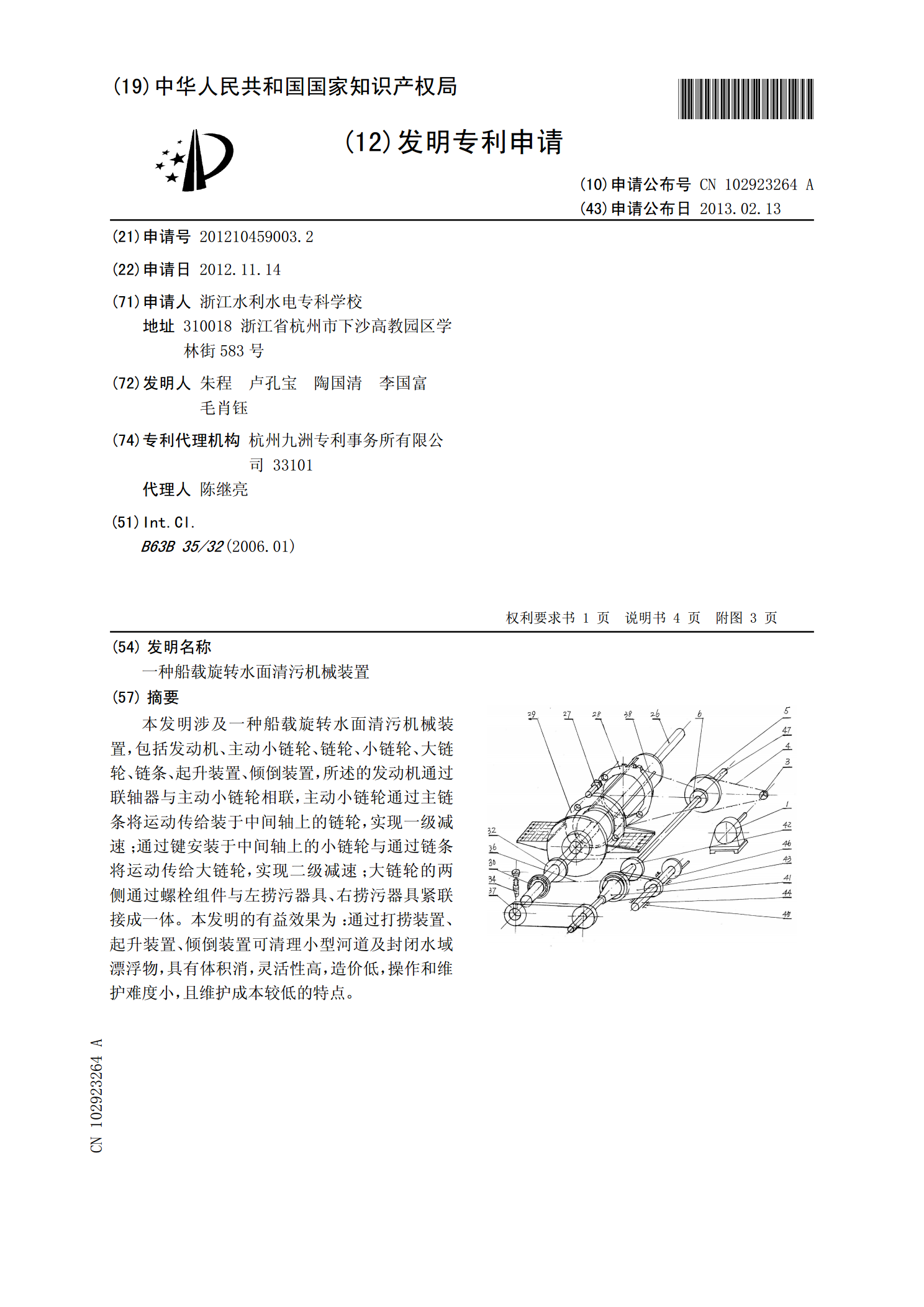
一种船载旋转水面清污机械装置.pdf
本发明涉及一种船载旋转水面清污机械装置,包括发动机、主动小链轮、链轮、小链轮、大链轮、链条、起升装置、倾倒装置,所述的发动机通过联轴器与主动小链轮相联,主动小链轮通过主链条将运动传给装于中间轴上的链轮,实现一级减速;通过键安装于中间轴上的小链轮与通过链条将运动传给大链轮,实现二级减速;大链轮的两侧通过螺栓组件与左捞污器具、右捞污器具紧联接成一体。本发明的有益效果为:通过打捞装置、起升装置、倾倒装置可清理小型河道及封闭水域漂浮物,具有体积消,灵活性高,造价低,操作和维护难度小,且维护成本较低的特点。