
一种电动自行车脚踏力矩控制装置.pdf

沛芹****ng

1/5
2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动自行车脚踏力矩控制装置.pdf
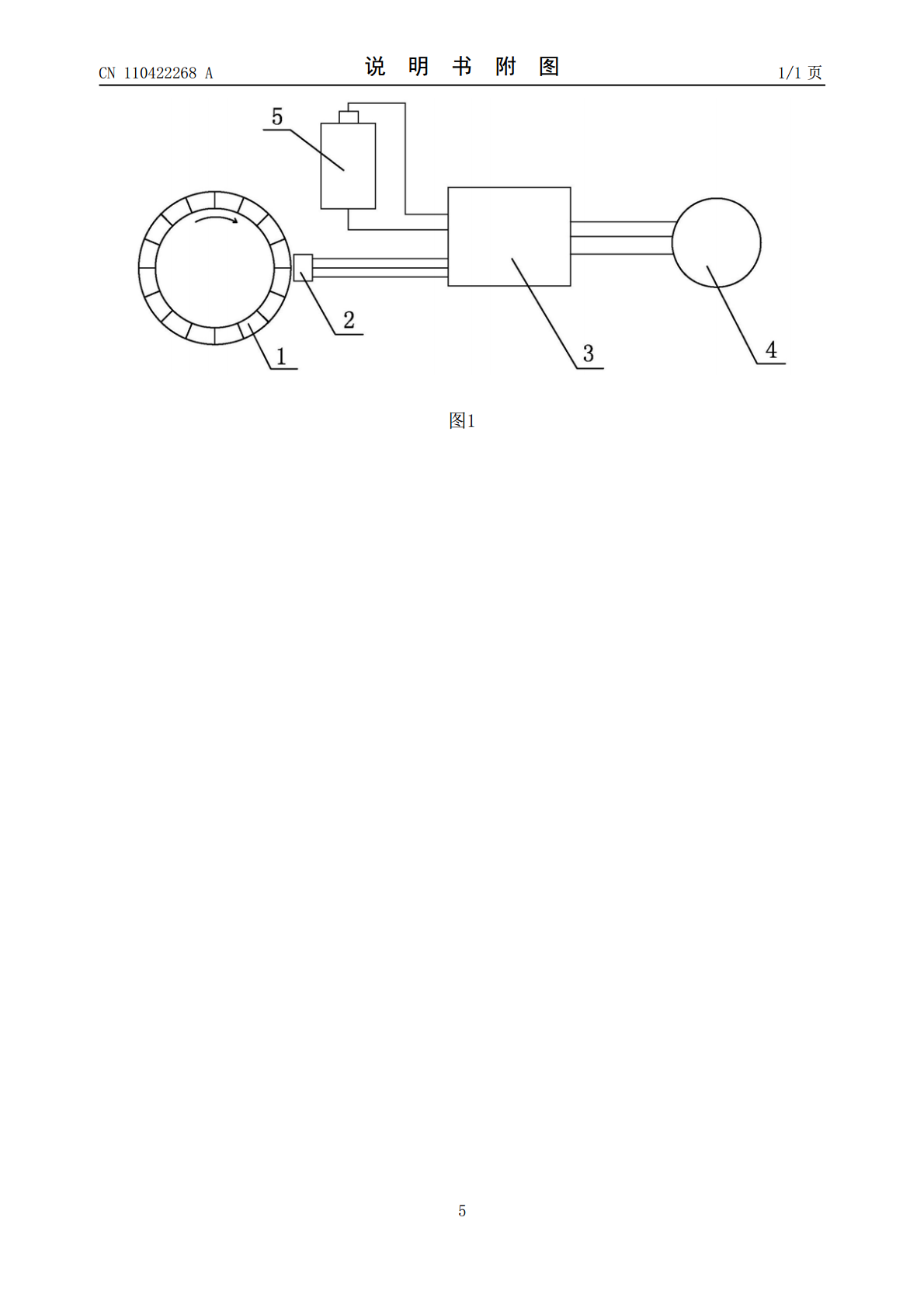
本发明公开了一种电动自行车脚踏力矩控制装置,包括通过电线连接的控制器和蓄电池,所述控制器通过电线与电动自行车的电机连接,其特征在于:所述的电动自行车脚踏力矩控制装置还包括一个随电动自行车链轮同步旋转的多极磁环和一个与所述多极磁环靠近配对安装的霍尔传感器,所述霍尔传感器位置位置固定,所述霍尔传感器与所述的控制器通过数据线连接建立信号通讯;控制器的CPU中灌装控制程序,该控制程序能根据前后两个霍尔脉冲信号的间隔时间来判定骑行者脚踏力的大小并据此控制相应的电机运转速度来实现脚踏力矩控制,结构简单,生产成本低,解

一种电动助力自行车力矩传动装置.pdf
本发明公开一种电动助力自行车力矩传动装置,力矩传动装置中的外壳固定在车架上,内斜齿环的内斜齿和外斜齿环的外斜齿相互啮合并两者都套装在中轴上,中轴与内斜齿环之间设有第一超越离合器,传感内碗和传感压环装在外斜齿环上远离内斜齿环的一段,传感压环与外斜齿环固定在一起,传感内碗的外圆周固定在外壳上,传感内碗为弹性材质,在传感内碗的端面上粘合有电阻式薄膜压力传感器,传感压环的一端通过多个滚珠压住传感内碗的端面,另一端与传动座套通过直齿相互咬合,传动座套通过座套轴承穿套在中轴上,传动座套的外侧段固定穿套有链盘,内侧段通

一种脚踏发电电动自行车.pdf
本发明公开了一种由发电机,电动机,三角架,发电机外转子,内转子空心轴,空心套筒,脚踏中轴,空心齿轮,行星增速齿轮,驱动链条齿轮花盘,脚踏定向棘轮,电动机定向棘轮的脚踏发电电动自行车。

一种力矩传感电动助力自行车.pdf
本发明公开了一种力矩传感电动助力自行车,包括自行车体,所述自行车体的前轴和后轴处均设置有直流电机,所述自行车体的中轴处设置有电动车助力器和力矩传感器,所述自行车体的车把手处设置有仪表盘,所述自行车体上安装有蓄电池、防护盒和打气筒,所述蓄电池位于防护盒内部,所述自行车体的坐垫处设置有LED灯板,所述LED灯板上设置有LED灯珠,所述自行车体后侧安装有自行车锁,所述自行车锁位于自行车体的后轮处。本发明通过LED灯珠为彩色LED灯珠,能够很好的起到警示的作用,避免事故的发生,仪表盘一侧设置有连接件,连接件一端连
笔记本电动车的脚踏装置及脚踏装置控制电动车的方法.pdf
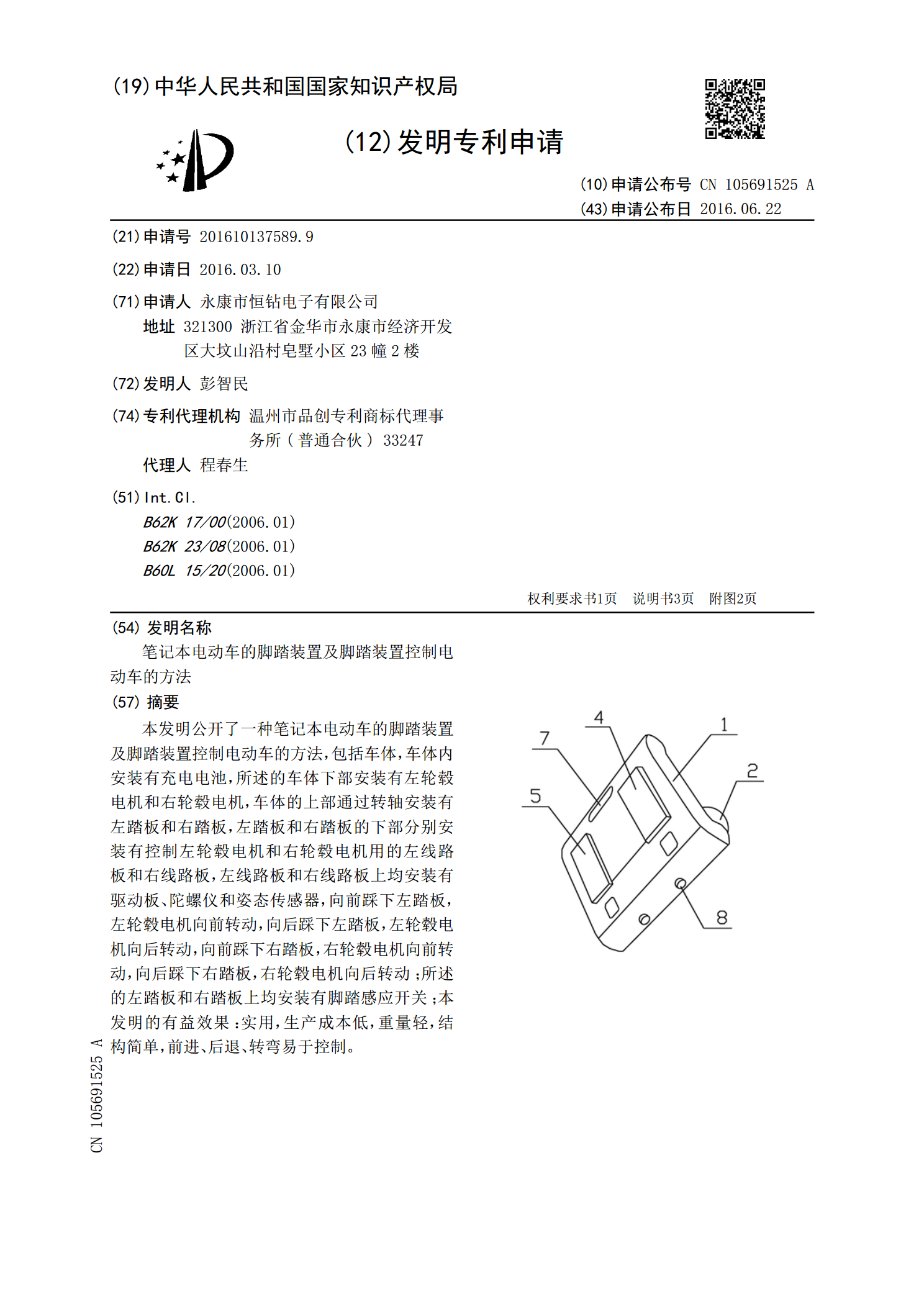
本发明公开了一种笔记本电动车的脚踏装置及脚踏装置控制电动车的方法,包括车体,车体内安装有充电电池,所述的车体下部安装有左轮毂电机和右轮毂电机,车体的上部通过转轴安装有左踏板和右踏板,左踏板和右踏板的下部分别安装有控制左轮毂电机和右轮毂电机用的左线路板和右线路板,左线路板和右线路板上均安装有驱动板、陀螺仪和姿态传感器,向前踩下左踏板,左轮毂电机向前转动,向后踩下左踏板,左轮毂电机向后转动,向前踩下右踏板,右轮毂电机向前转动,向后踩下右踏板,右轮毂电机向后转动;所述的左踏板和右踏板上均安装有脚踏感应开关;本发