
数据融合方法、装置及存储介质.pdf

骊英****bb

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

数据融合方法、装置及存储介质.pdf
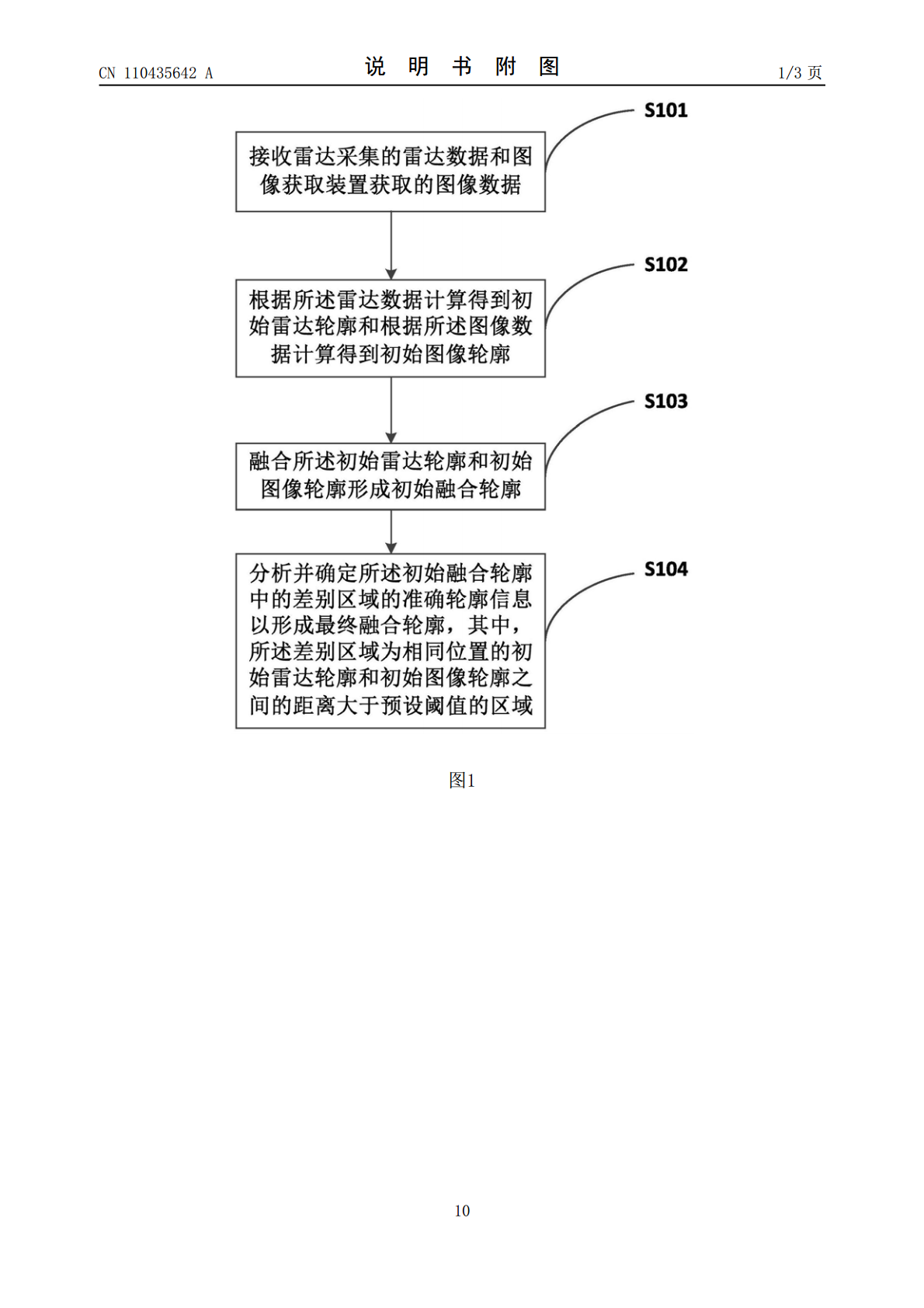
本发明提供了一种数据融合方法、装置及存储介质,涉及数据处理领域。本发明的数据融合方法包括接收雷达采集的雷达数据和图像获取装置获取的图像数据;根据雷达数据计算得到初始雷达轮廓和根据图像数据计算得到初始图像轮廓;融合初始雷达轮廓和初始图像轮廓形成初始融合轮廓;分析并确定初始融合轮廓中的差别区域的准确轮廓信息以形成最终融合轮廓,其中,差别区域为相同位置的初始雷达轮廓和初始图像轮廓之间的距离大于预设阈值的区域,位于所述差别区域内的部分初始雷达轮廓和部分初始图像轮廓为区域轮廓信息。采用上述方法,这样可以有效减少缩短
模态数据融合处理方法、装置、设备及存储介质.pdf
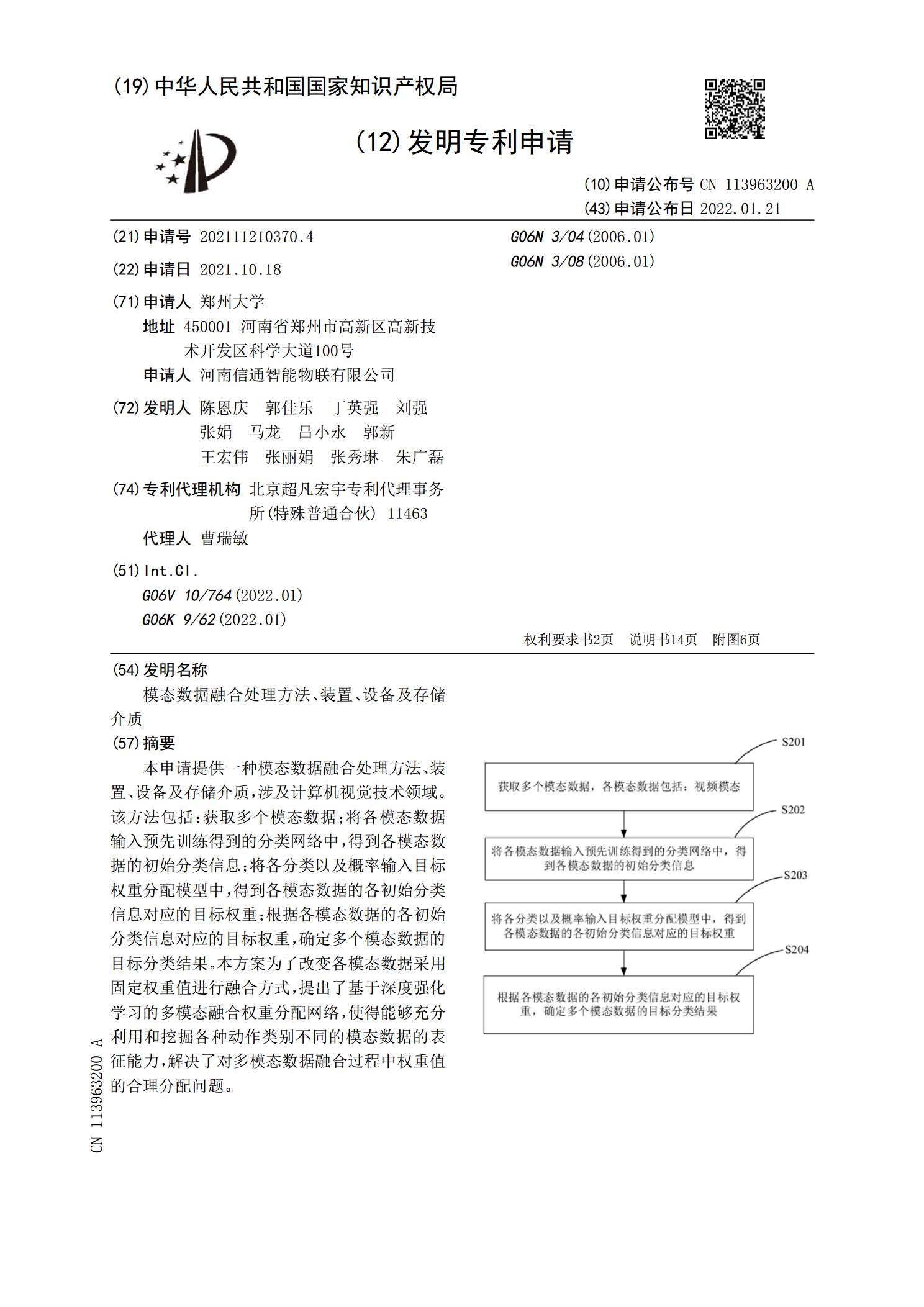
本申请提供一种模态数据融合处理方法、装置、设备及存储介质,涉及计算机视觉技术领域。该方法包括:获取多个模态数据;将各模态数据输入预先训练得到的分类网络中,得到各模态数据的初始分类信息;将各分类以及概率输入目标权重分配模型中,得到各模态数据的各初始分类信息对应的目标权重;根据各模态数据的各初始分类信息对应的目标权重,确定多个模态数据的目标分类结果。本方案为了改变各模态数据采用固定权重值进行融合方式,提出了基于深度强化学习的多模态融合权重分配网络,使得能够充分利用和挖掘各种动作类别不同的模态数据的表征能力,解

数据融合系统、数据融合方法和装置、计算机存储介质.pdf
本公开的实施例提供一种数据融合方法,具体实现方案为:建图模块,用于接收多源异构数据,并对多源异构数据进行处理生成数据对象以及对象关系,将数据对象和对象关系导入图数据库中;插件模块,采用人工智能算法解析多源异构数据,得到解析结果;融合模块,用于将图数据库中的数据对象、对象关系分别与解析结果进行融合,得到融合结果。通过本实施方式,提高了多源异构数据融合的效率。
数据融合调度方法、装置、设备及可读存储介质.pdf
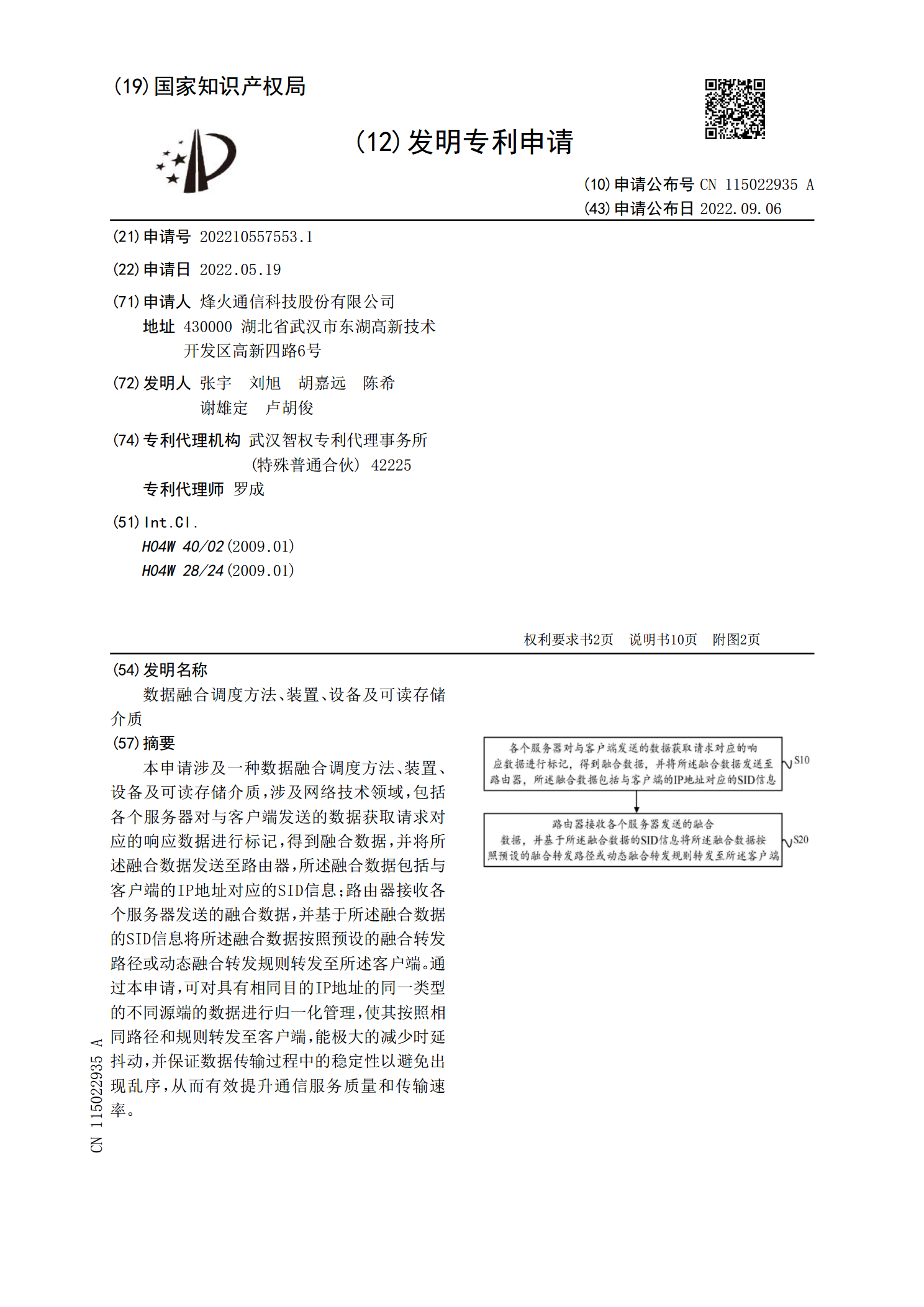
本申请涉及一种数据融合调度方法、装置、设备及可读存储介质,涉及网络技术领域,包括各个服务器对与客户端发送的数据获取请求对应的响应数据进行标记,得到融合数据,并将所述融合数据发送至路由器,所述融合数据包括与客户端的IP地址对应的SID信息;路由器接收各个服务器发送的融合数据,并基于所述融合数据的SID信息将所述融合数据按照预设的融合转发路径或动态融合转发规则转发至所述客户端。通过本申请,可对具有相同目的IP地址的同一类型的不同源端的数据进行归一化管理,使其按照相同路径和规则转发至客户端,能极大的减少时延抖动
多雷达数据融合方法、装置、存储介质和设备.pdf
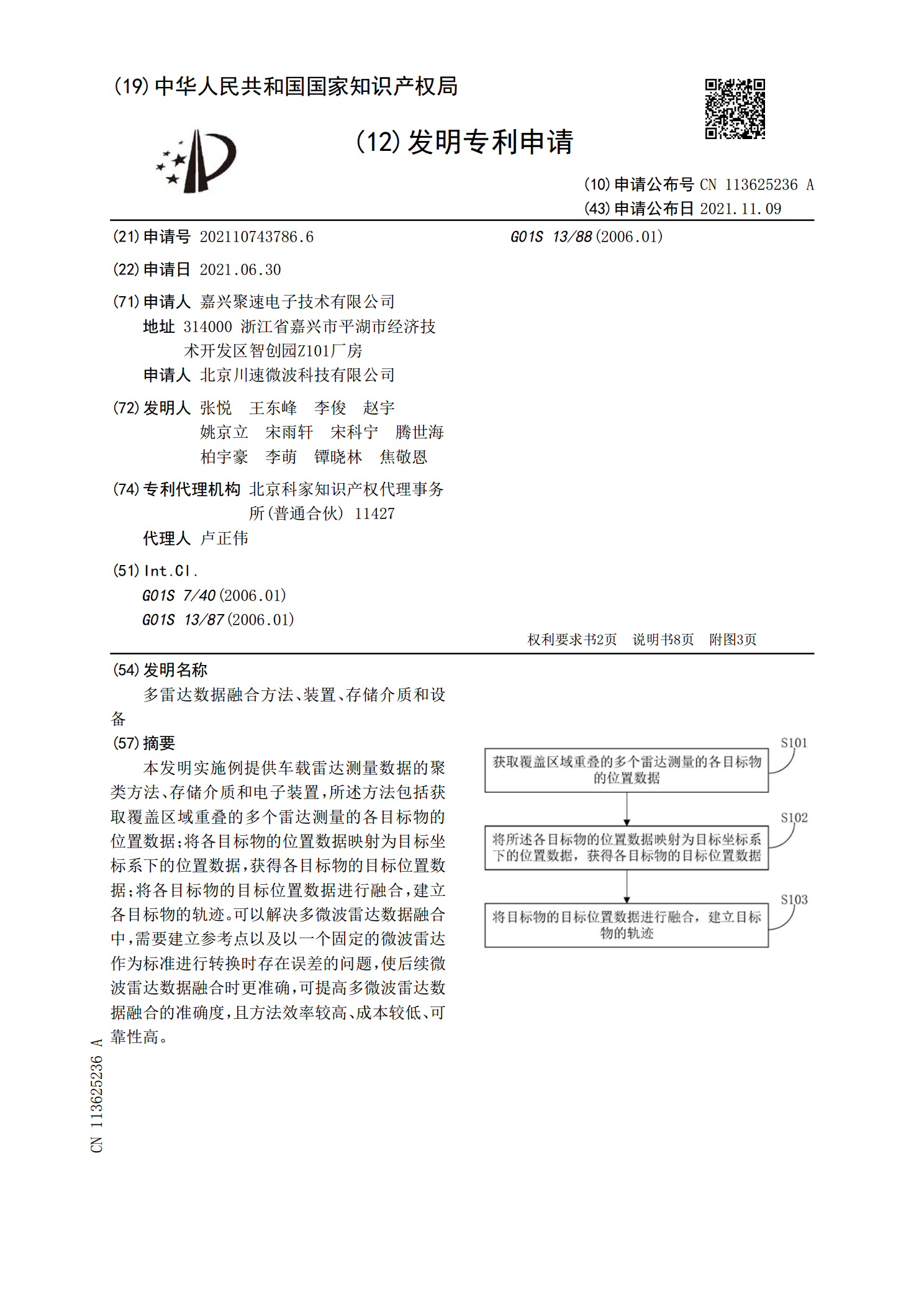
本发明实施例提供车载雷达测量数据的聚类方法、存储介质和电子装置,所述方法包括获取覆盖区域重叠的多个雷达测量的各目标物的位置数据;将各目标物的位置数据映射为目标坐标系下的位置数据,获得各目标物的目标位置数据;将各目标物的目标位置数据进行融合,建立各目标物的轨迹。可以解决多微波雷达数据融合中,需要建立参考点以及以一个固定的微波雷达作为标准进行转换时存在误差的问题,使后续微波雷达数据融合时更准确,可提高多微波雷达数据融合的准确度,且方法效率较高、成本较低、可靠性高。