
基于多变量动态矩阵的水轮机调速控制方法、装置及系统.pdf

一只****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多变量动态矩阵的水轮机调速控制方法、装置及系统.pdf
本申请涉及一种基于多变量动态矩阵的水轮机调速控制方法、装置及系统,在进行水轮机调速控制时,采用比例积分微分调节可以达到转动频率快速趋近给定的标准频率的目的,在转动频率接近标准频率时,转用多变量动态矩阵调节,可以使得转动频率逐渐调整至标准频率,防止出现超调的情况,从而提高控制可靠性和稳定性。
基于ADPSS的水轮机调速系统阻尼测试方法及装置.pdf
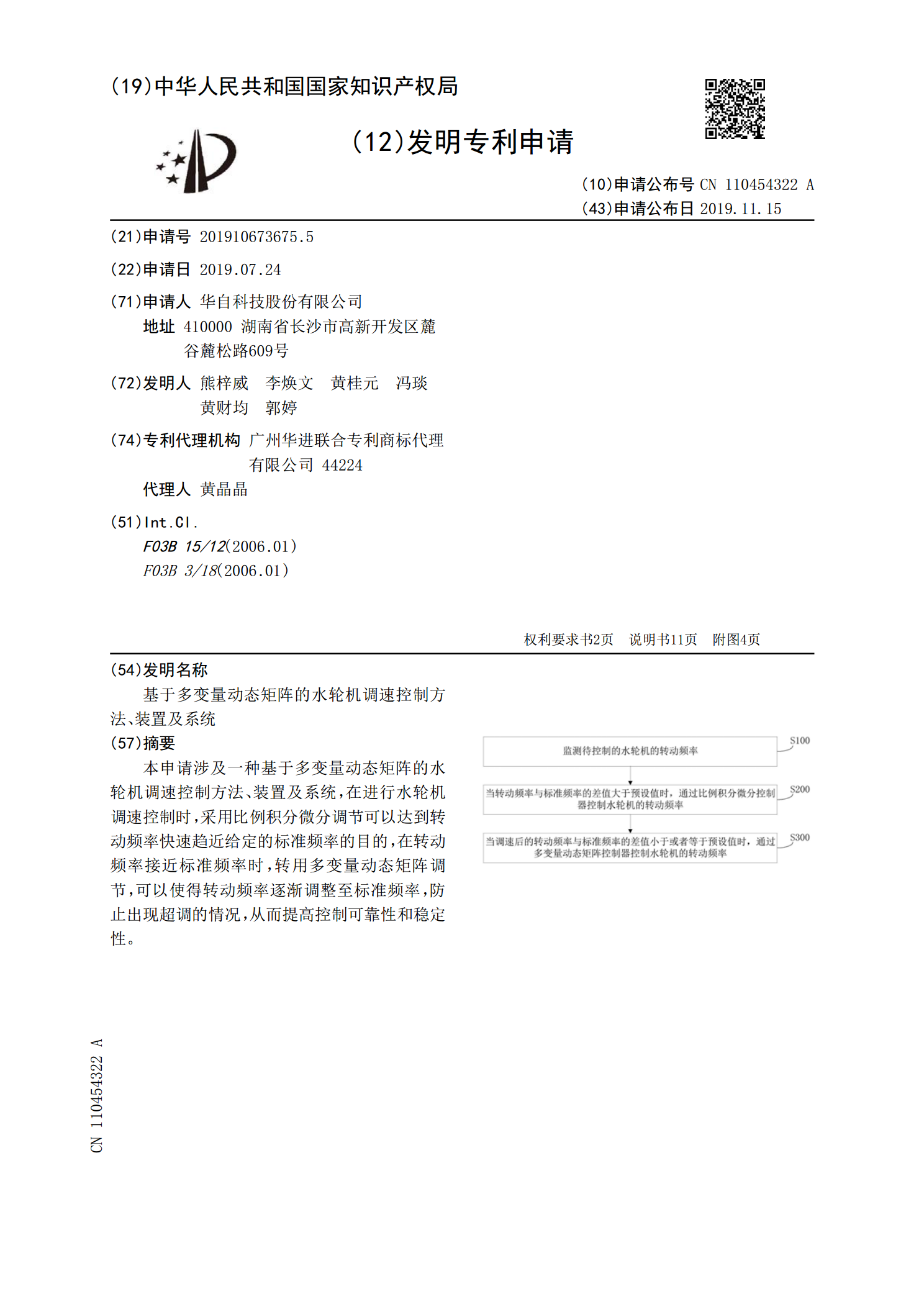
本发明公开了基于ADPSS的水轮机调速系统阻尼测试方法及装置,通过在ADPSS中建立待测试水轮机调速系统所接入电网的机电‑电磁混合仿真模型;将所述仿真模型中待测试机组的频率信号输出,接入调速器输入端,所述调速器输出水门开度指令信号Y

基于多模型动态矩阵控制的喷氨优化装置及应用.docx
基于多模型动态矩阵控制的喷氨优化装置及应用基于多模型动态矩阵控制的喷氨优化装置及应用摘要:近年来,空气污染和温室气体排放问题日益突出,尤其是氨气的排放对环境和人体健康造成了严重影响。因此,开发一种高效的喷氨优化装置具有重要意义。本文基于多模型动态矩阵控制的思想,提出了一种喷氨优化装置,并通过实验验证了其在氨气排放控制方面的应用效果。实验结果表明,该装置能够有效地降低氨气的排放浓度,实现环境污染的最小化。因此,基于多模型动态矩阵控制的喷氨优化装置在环境保护和空气质量改善方面具有巨大潜力。关键词:多模型动态矩

水轮机调节系统的动态矩阵预测控制的开题报告.docx
水轮机调节系统的动态矩阵预测控制的开题报告一、选题背景水电站作为重要的清洁能源产生方式之一,为国家电力供应提供了重要的支持。水轮机作为水电站发电的核心装置,其安全稳定运行是发电效率的关键保证。而水轮机调节系统则是水轮机能够稳定运行的重要保障。传统的水轮机调节系统往往采用PID控制器,但其仅依靠测量的瞬时值进行控制,难以全面掌控水轮机在运行过程中的状态,因此控制效果一般。另外,水轮机的运行存在冲击负荷、质量跟随性差、非线性等难点问题,加之水轮机负荷柔和控制的要求越来越高,传统的控制方法已经无法满足实际需求。
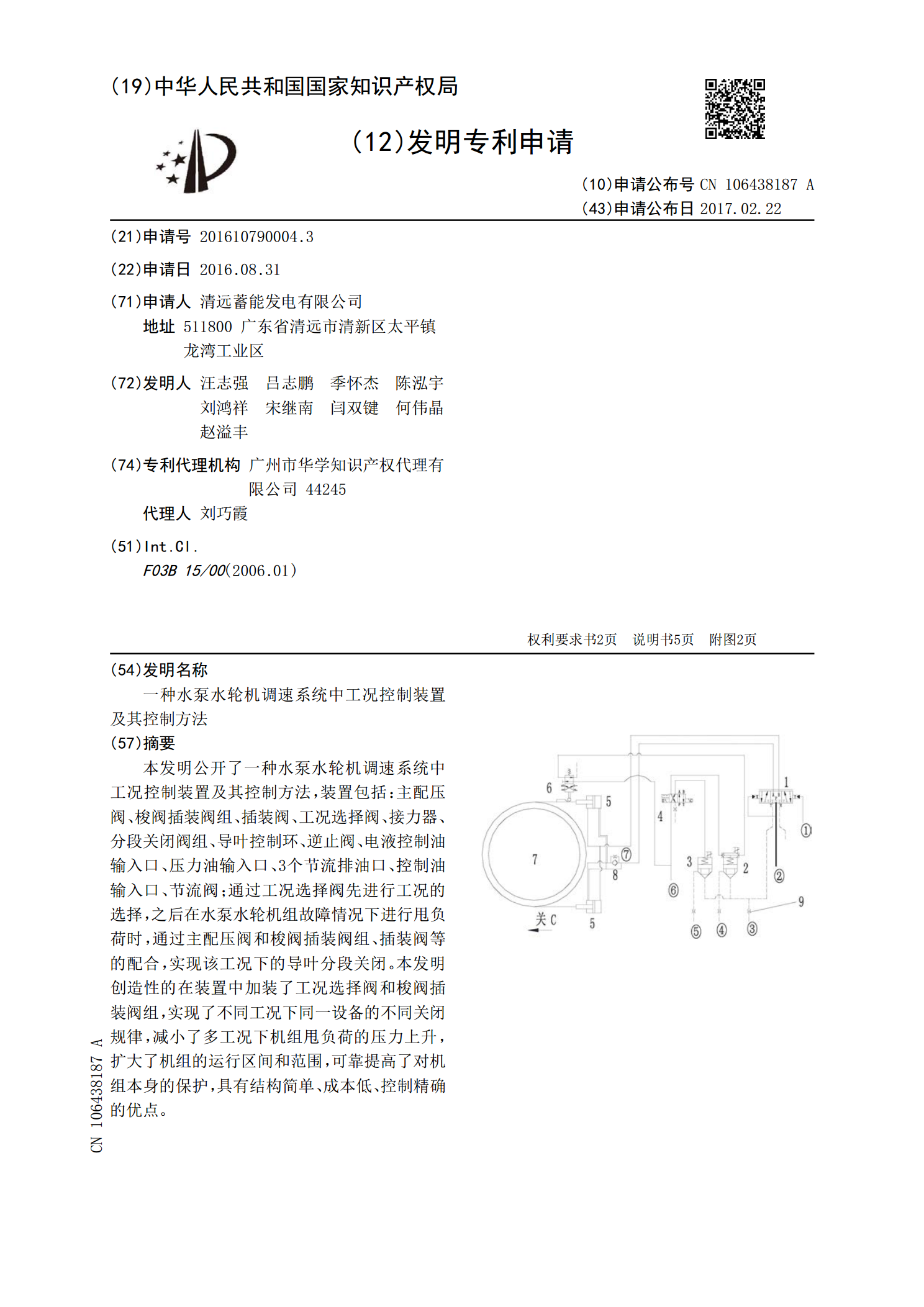
一种水泵水轮机调速系统中工况控制装置及其控制方法.pdf
本发明公开了一种水泵水轮机调速系统中工况控制装置及其控制方法,装置包括:主配压阀、梭阀插装阀组、插装阀、工况选择阀、接力器、分段关闭阀组、导叶控制环、逆止阀、电液控制油输入口、压力油输入口、3个节流排油口、控制油输入口、节流阀;通过工况选择阀先进行工况的选择,之后在水泵水轮机组故障情况下进行甩负荷时,通过主配压阀和梭阀插装阀组、插装阀等的配合,实现该工况下的导叶分段关闭。本发明创造性的在装置中加装了工况选择阀和梭阀插装阀组,实现了不同工况下同一设备的不同关闭规律,减小了多工况下机组甩负荷的压力上升,扩大了