
基于ADPSS的水轮机调速系统阻尼测试方法及装置.pdf

宏硕****mo

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于ADPSS的水轮机调速系统阻尼测试方法及装置.pdf
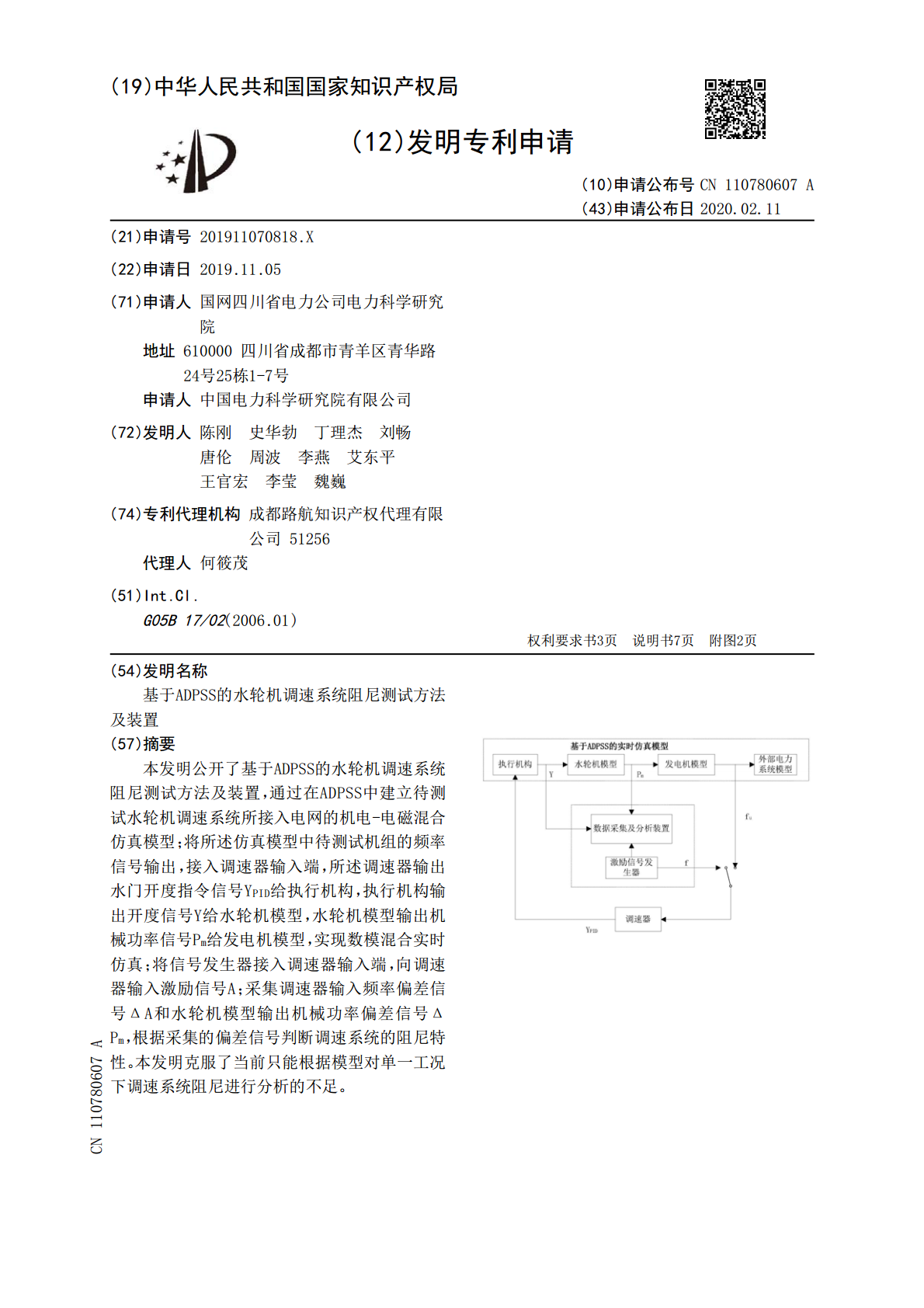
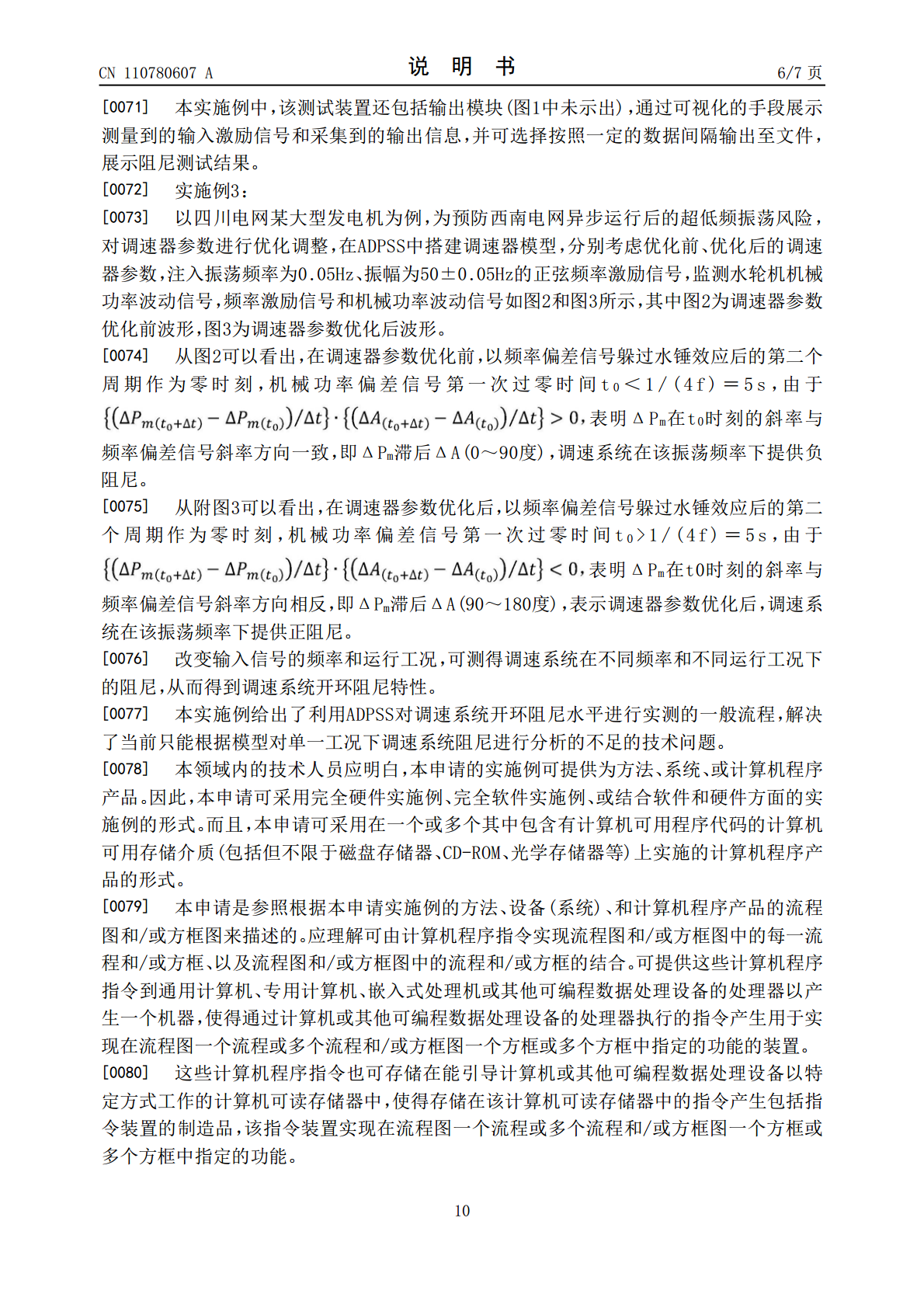
本发明公开了基于ADPSS的水轮机调速系统阻尼测试方法及装置,通过在ADPSS中建立待测试水轮机调速系统所接入电网的机电‑电磁混合仿真模型;将所述仿真模型中待测试机组的频率信号输出,接入调速器输入端,所述调速器输出水门开度指令信号Y
一种水轮机调速系统阻尼特性实测方法及装置.pdf
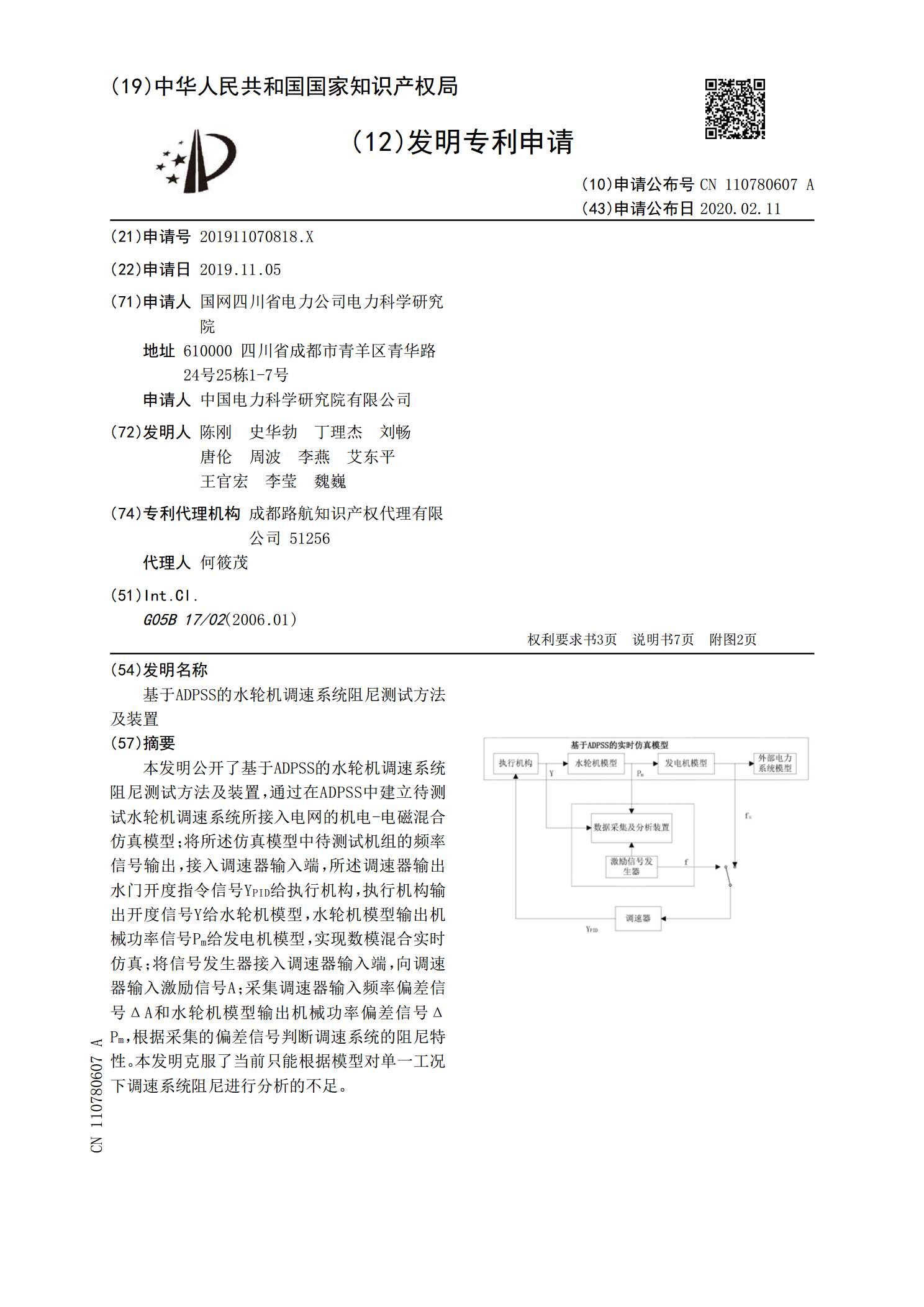
本发明公开了一种水轮机调速系统阻尼特性实测方法及装置,解决了现有的根据模型对水轮机调速系统阻尼进行分析时仅仅得到单一工况下水轮机的水锤效应时间常数,当水头、发电机出力变化时会带来严重分析误差问题。本发明方法包括以下步骤:S1:频率特性实测区间和间隔的分析与选定;S2:向水轮机调速器输入激励信号,进行水轮机调速器控制水轮机导叶开度、水轮机组输出机械功率和发电机组的功率变化分析;S3:采集输入激励信号、水轮机导叶开度、水轮机组输出机械功率三组数据;S4:根据步骤S2的输入信号和步骤S3的输出信号进行调速器和整
一种水轮机调速系统的阻尼特性分析方法.pdf
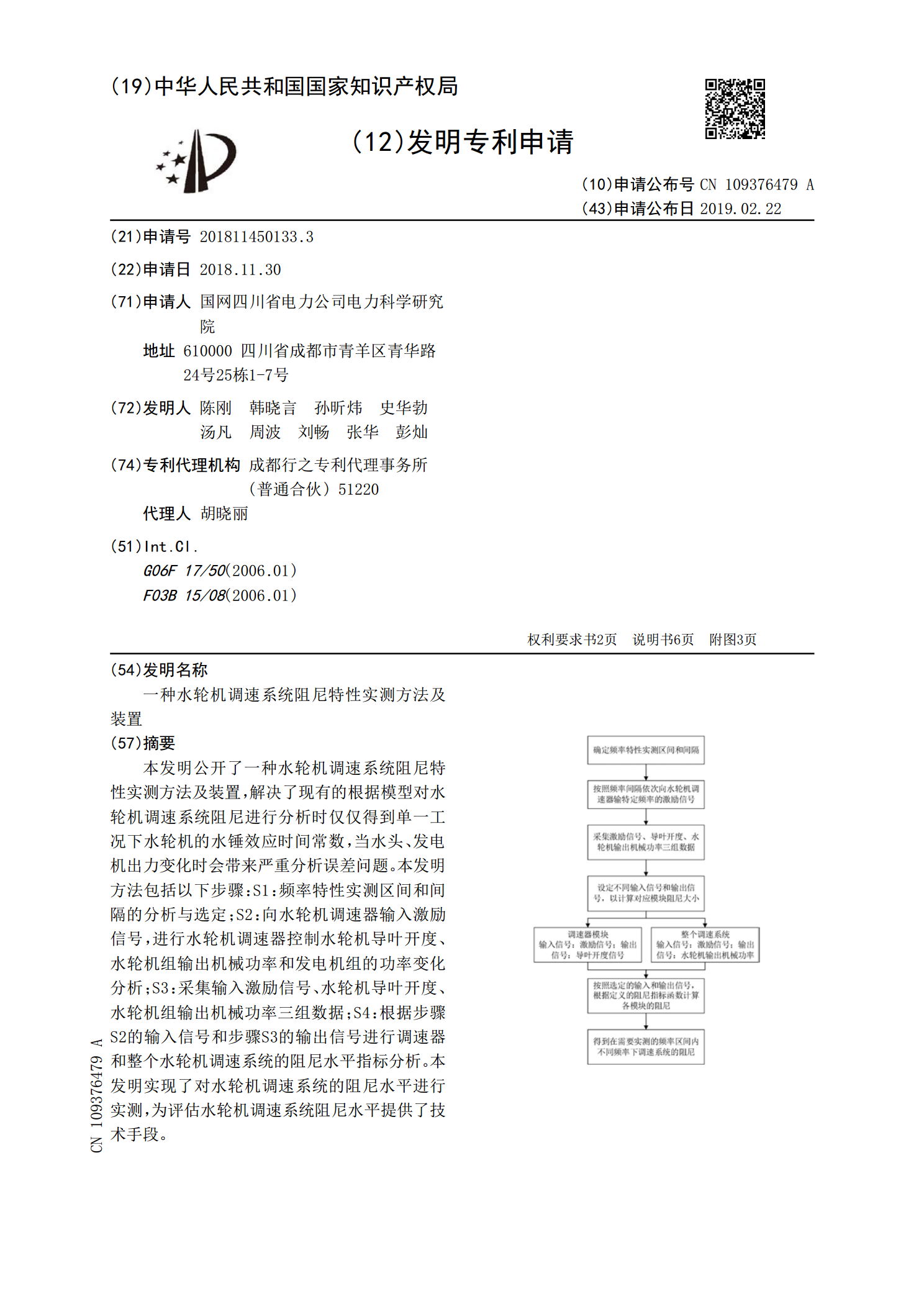
本发明公开一种水轮机调速系统的阻尼特性分析方法,涉及水轮机发电系统,为分析电力系统中异步区域的水轮机调速器参数设置对超低频振荡的影响。水轮机调速系统的阻尼特性分析方法,包括:建立水轮机调速系统的简化模型,根据水轮机调速系统的简化模型建立水轮机调速系统的传递函数;根据水轮机调速系统的传递函数,得到在超低频段下水轮机的阻尼转矩;确定水轮机的阻尼转矩在相角‑转速坐标系中的位置;判断水轮机的阻尼转矩处在相角‑转速坐标系中的位置,从而确定水轮机的阻尼转矩对超低频段的振荡起抑制或放大作用。

水轮机调速系统仿真测试装置.pdf
本发明提供一种水轮机调速系统仿真测试装置,包括:DSP嵌入式内核及其逻辑主控模块,所述DSP嵌入式内核及其逻辑主控模块为所述水轮机调速系统仿真测试装置的逻辑控制核心,用于分别控制模拟信号调理模块、开关信号输入模块、频率信号发生模块、频率信号测量模块、仿真指令控制模块、模型库存储模块和USB通信接口模块的工作过程。本发明提供的水轮机调速系统仿真测试装置,功能齐全,能对多种输入信号进行处理,达到仿真数字机组的功能。而且,本发明采用的独特的隔离电路布置方式能够保证各通道之间达到相互隔离,通道前后级之间隔离,从而
基于多变量动态矩阵的水轮机调速控制方法、装置及系统.pdf
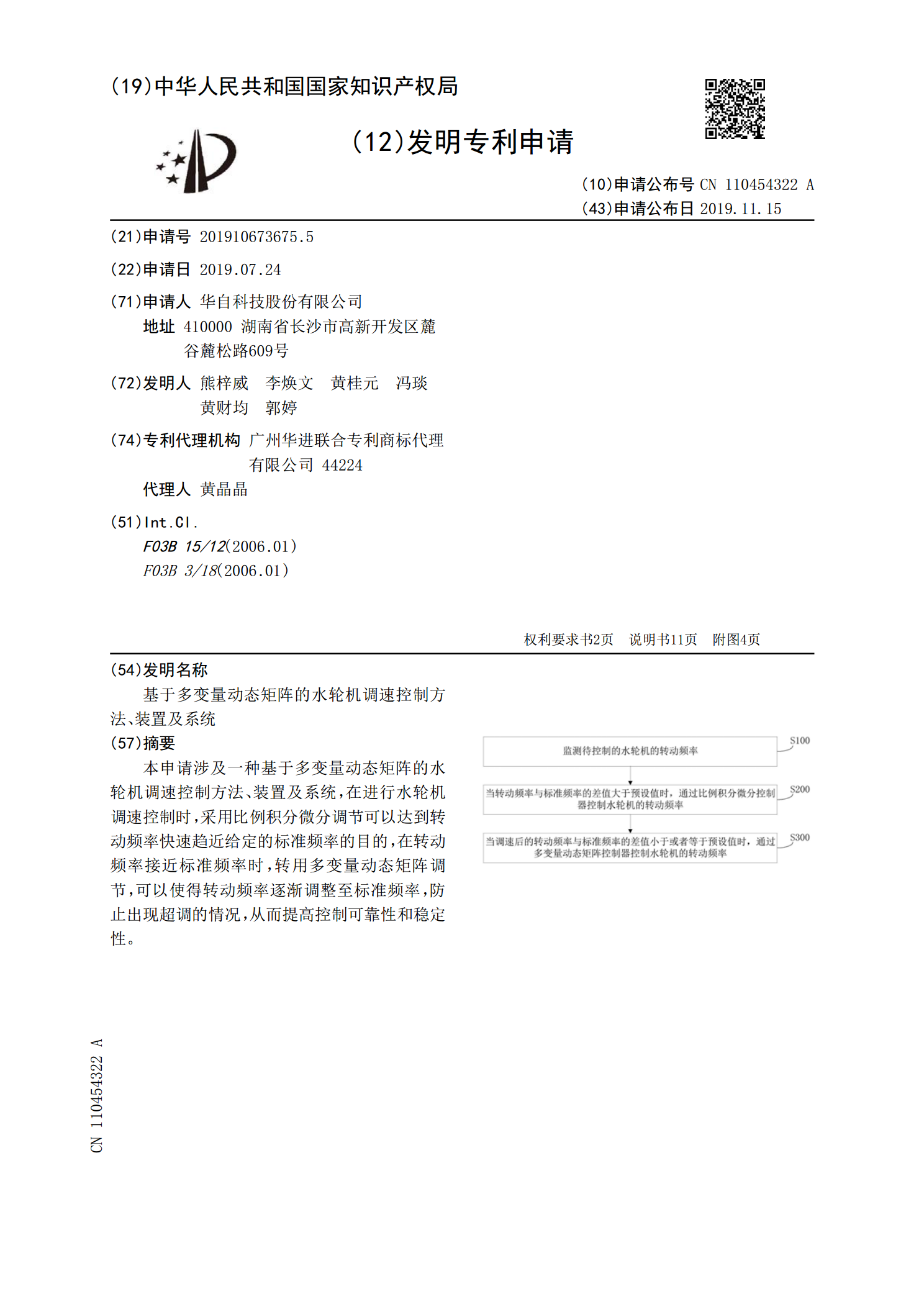
本申请涉及一种基于多变量动态矩阵的水轮机调速控制方法、装置及系统,在进行水轮机调速控制时,采用比例积分微分调节可以达到转动频率快速趋近给定的标准频率的目的,在转动频率接近标准频率时,转用多变量动态矩阵调节,可以使得转动频率逐渐调整至标准频率,防止出现超调的情况,从而提高控制可靠性和稳定性。