
一种手持激光三维扫描仪、扫描方法及装置.pdf

梅雪****67

1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种手持激光三维扫描仪、扫描方法及装置.pdf
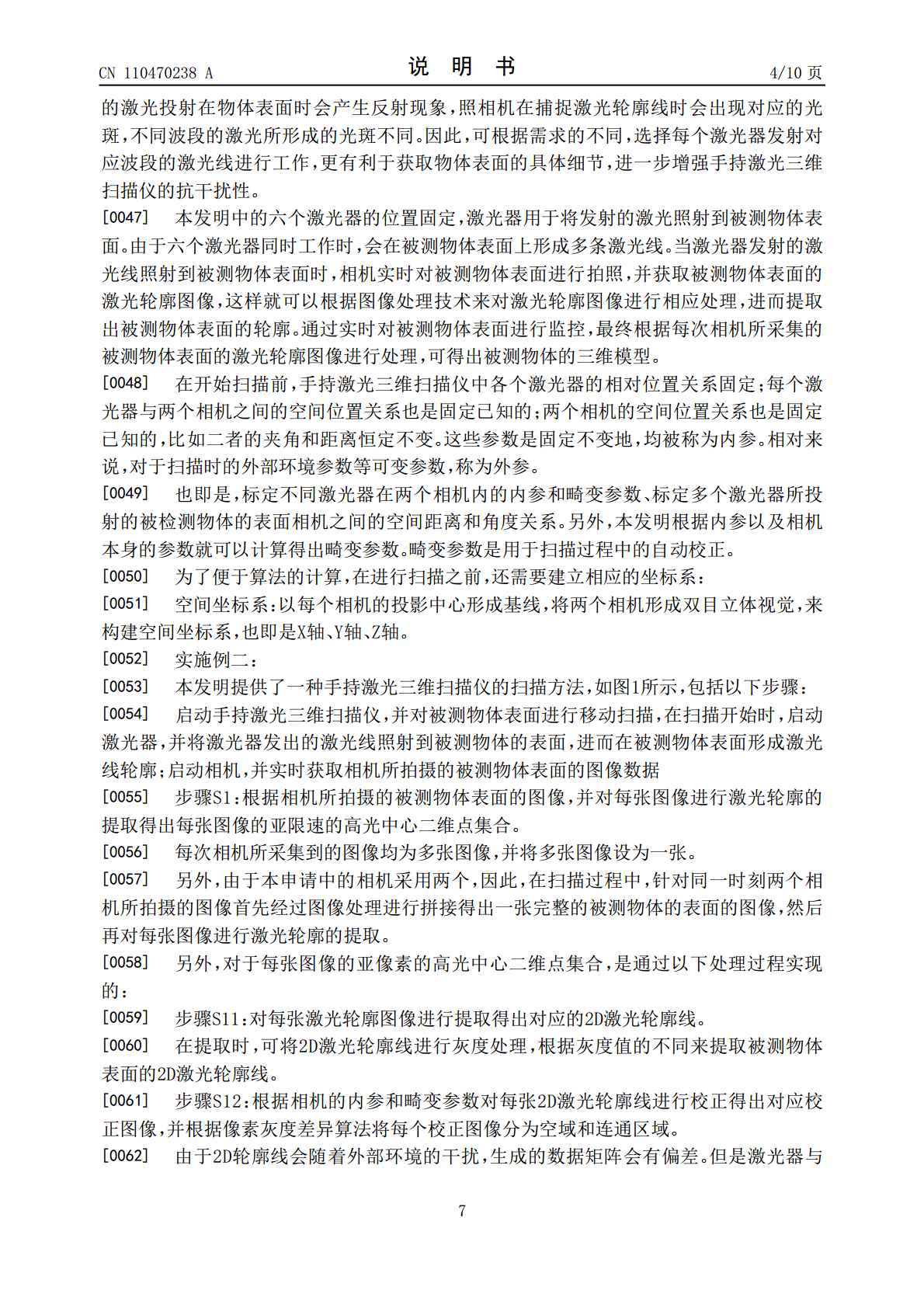
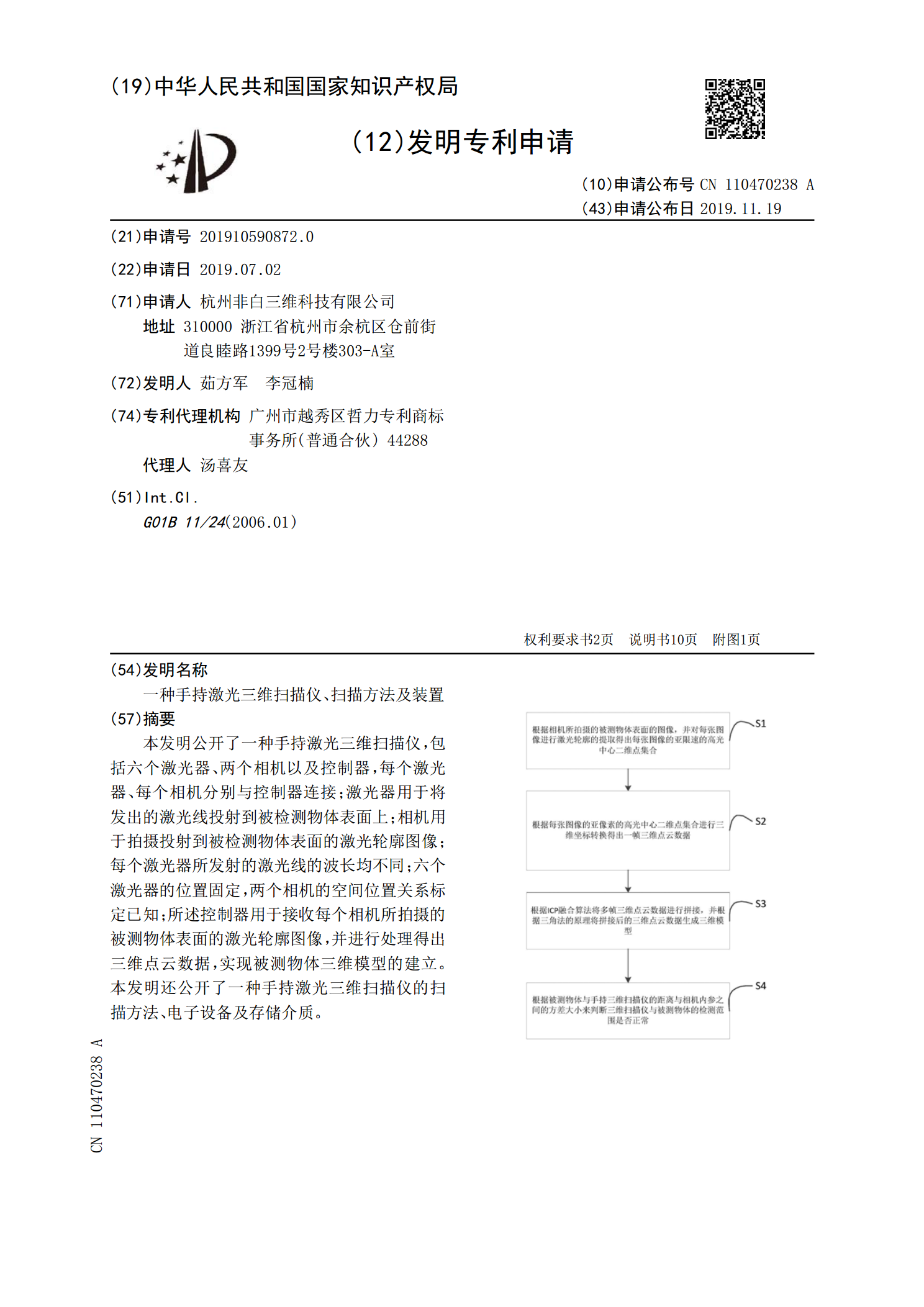
本发明公开了一种手持激光三维扫描仪,包括六个激光器、两个相机以及控制器,每个激光器、每个相机分别与控制器连接;激光器用于将发出的激光线投射到被检测物体表面上;相机用于拍摄投射到被检测物体表面的激光轮廓图像;每个激光器所发射的激光线的波长均不同;六个激光器的位置固定,两个相机的空间位置关系标定已知;所述控制器用于接收每个相机所拍摄的被测物体表面的激光轮廓图像,并进行处理得出三维点云数据,实现被测物体三维模型的建立。本发明还公开了一种手持激光三维扫描仪的扫描方法、电子设备及存储介质。

手持扫描仪、手持扫描仪点云拼接方法和装置.pdf
本发明公开了一种手持扫描仪、手持扫描仪点云拼接方法和装置,该方法包括当检测到扫描指令时,获取手持扫描仪扫描的当前空间点云,并基于姿态传感器获取扫描头的当前指向信息;将当前空间点云和当前指向信息关联,并判断当前空间点云是否为初始空间点云;若当前空间点云是初始空间点云,则将当前空间点云作为初始空间点云;若当前空间点云不是初始空间点云,则根据当前指向信息和初始空间点云的初始指向信息,对当前空间点云和初始空间点云进行拼接,拼接完成后的空间点云,作为初始空间点云。本发明避免在空间全角度范围内进行遍例式、盲目地空间点
一种三维激光扫描仪校准装置.pdf
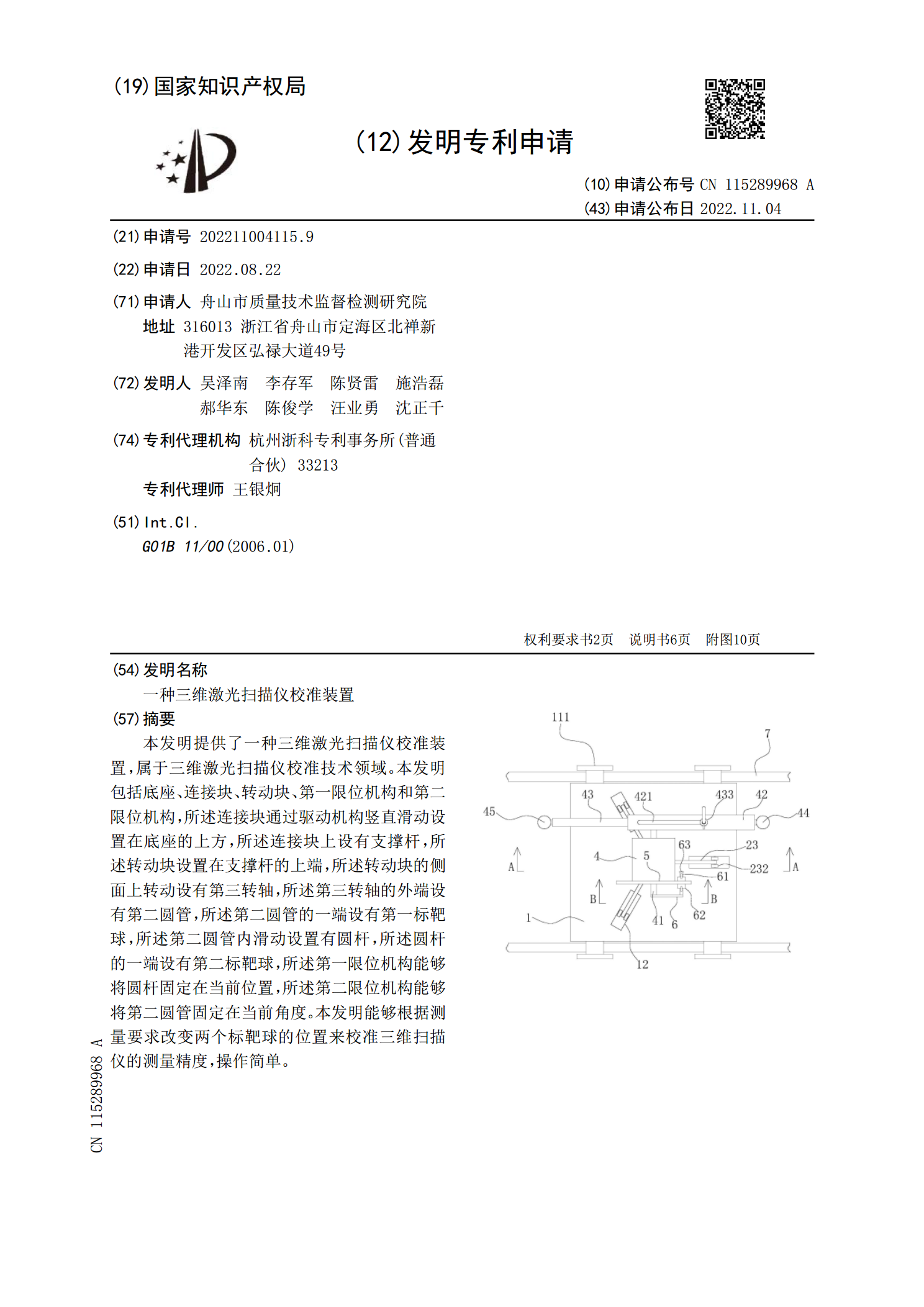
本发明提供了一种三维激光扫描仪校准装置,属于三维激光扫描仪校准技术领域。本发明包括底座、连接块、转动块、第一限位机构和第二限位机构,所述连接块通过驱动机构竖直滑动设置在底座的上方,所述连接块上设有支撑杆,所述转动块设置在支撑杆的上端,所述转动块的侧面上转动设有第三转轴,所述第三转轴的外端设有第二圆管,所述第二圆管的一端设有第一标靶球,所述第二圆管内滑动设置有圆杆,所述圆杆的一端设有第二标靶球,所述第一限位机构能够将圆杆固定在当前位置,所述第二限位机构能够将第二圆管固定在当前角度。本发明能够根据测量要求改变

手持激光扫描仪辅助装备.pdf
本发明涉及一种手持激光扫描仪辅助装备,该方案包括身体固定套件、臂托及扫描仪支撑杆;身体固定套件包括腰托、胸托及设于腰托和胸托之间的连杆结构;腰托上设有控制盒,控制盒上至少设有控制板、无线通信模块、存储模块及电源,扫描仪通过线束与控制板连接;臂托上设有与手臂绑定的绑带部及用于绑定线束的线束绑带;扫描仪支撑杆与腰托可拆卸固定,且扫描仪支撑杆的杆芯通过可任意弯曲随停的材料制成,且扫描仪支撑杆远离腰托的一端设有扫描仪夹爪,通过扫描仪夹爪夹持扫描仪或其他移动终端,该装备可极大程度地缓解用户的手臂疲劳,且通过控制盒可

手持三维激光扫描仪在平立面测量中的应用.docx
手持三维激光扫描仪在平立面测量中的应用手持三维激光扫描仪在平立面测量中的应用摘要:近年来,随着激光扫描技术的不断发展,手持三维激光扫描仪在平立面测量中被广泛应用。本文将介绍手持三维激光扫描仪的原理及特点,阐述它在平立面测量中的应用,如建筑测量、工业设计、文物保护等。本文总结了手持三维激光扫描仪的优势和局限性,并对未来的研究方向进行了展望。关键词:手持三维激光扫描仪、平立面测量、建筑测量、工业设计、文物保护1.引言随着科技的不断进步,各行各业对高精度三维测量的需求越来越大。传统的测量方法存在许多局限性,如操