
喷釉系统、施釉生产线以及施釉方法.pdf

玉军****la


1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
喷釉系统、施釉生产线以及施釉方法.pdf
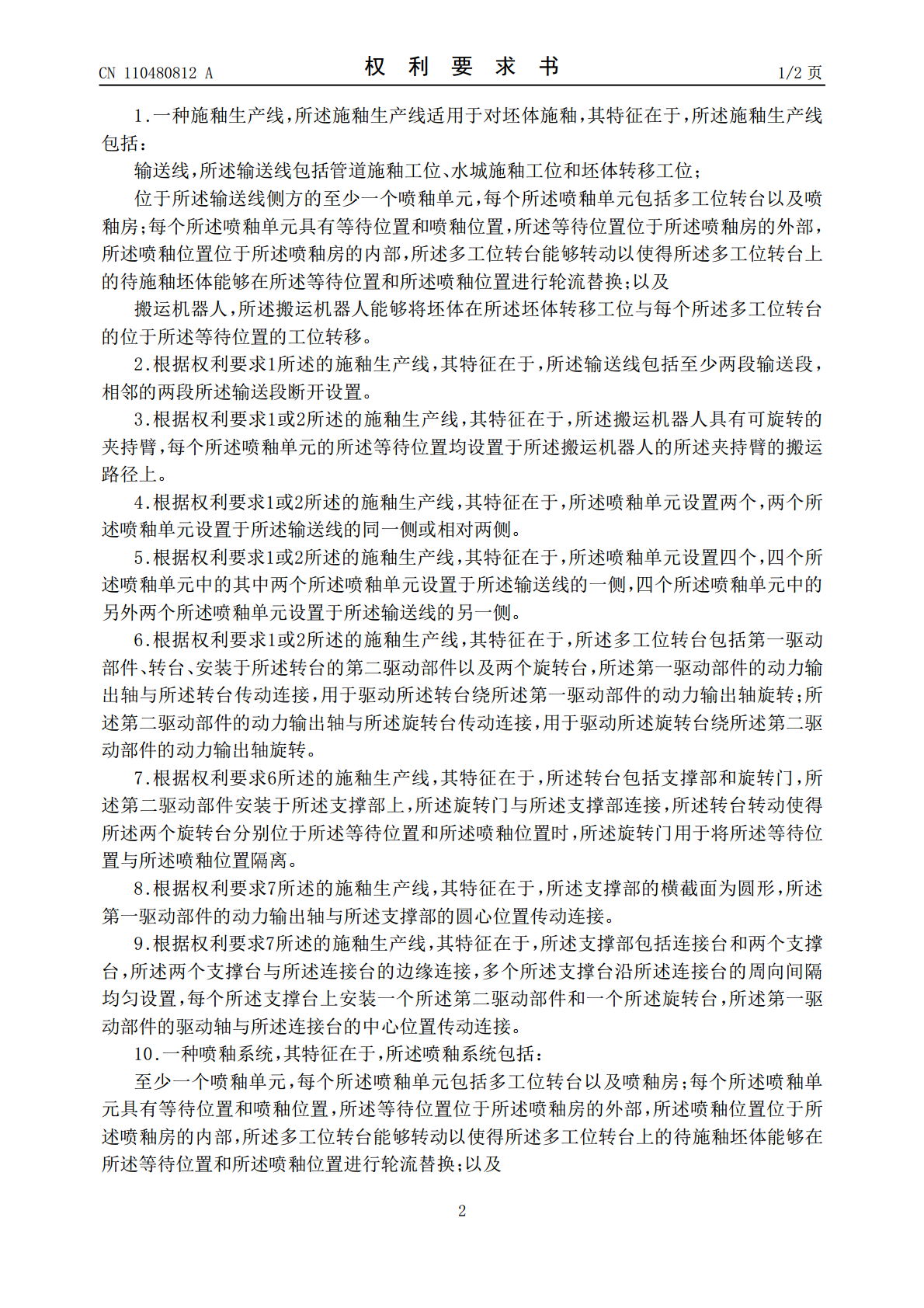
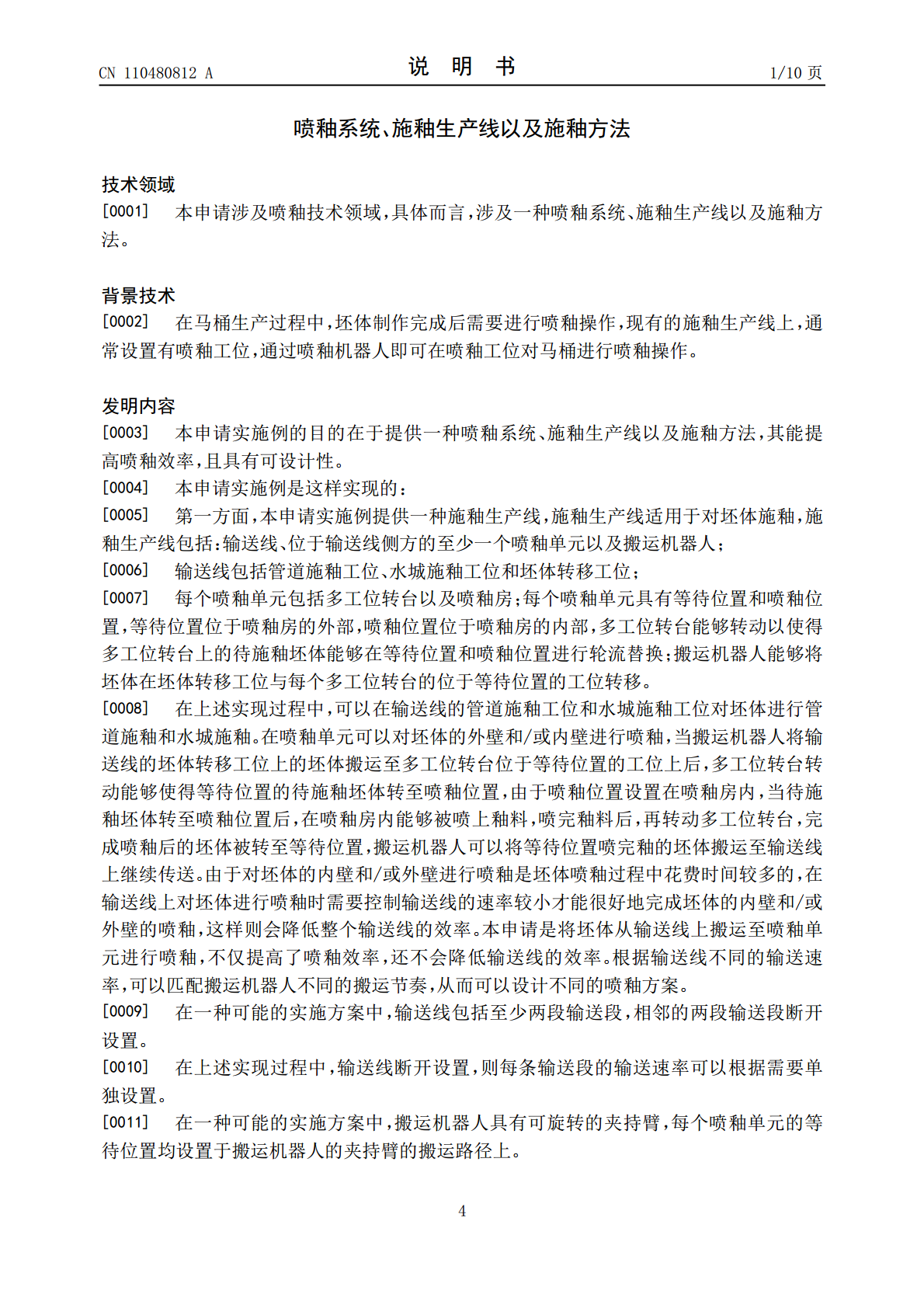
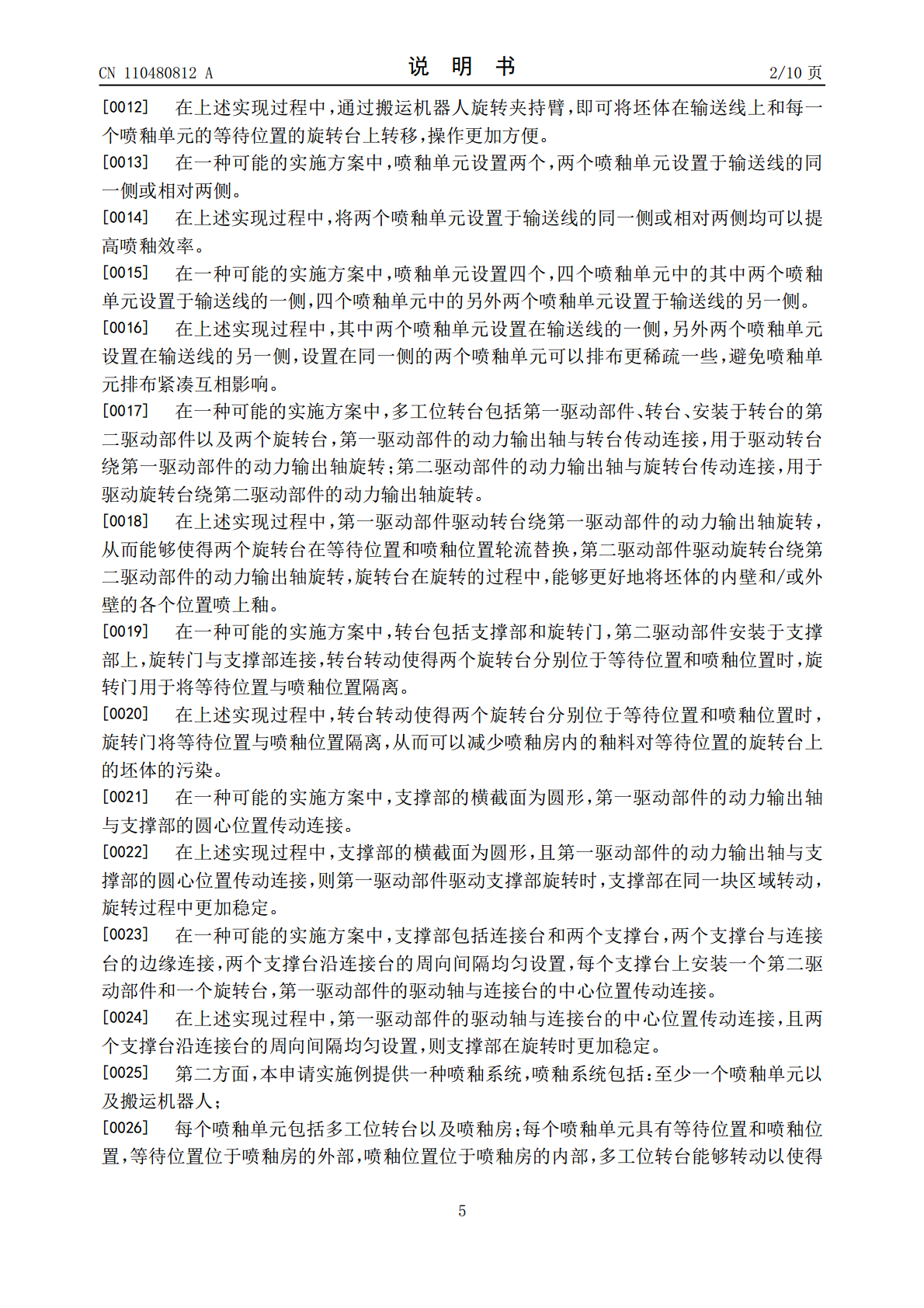
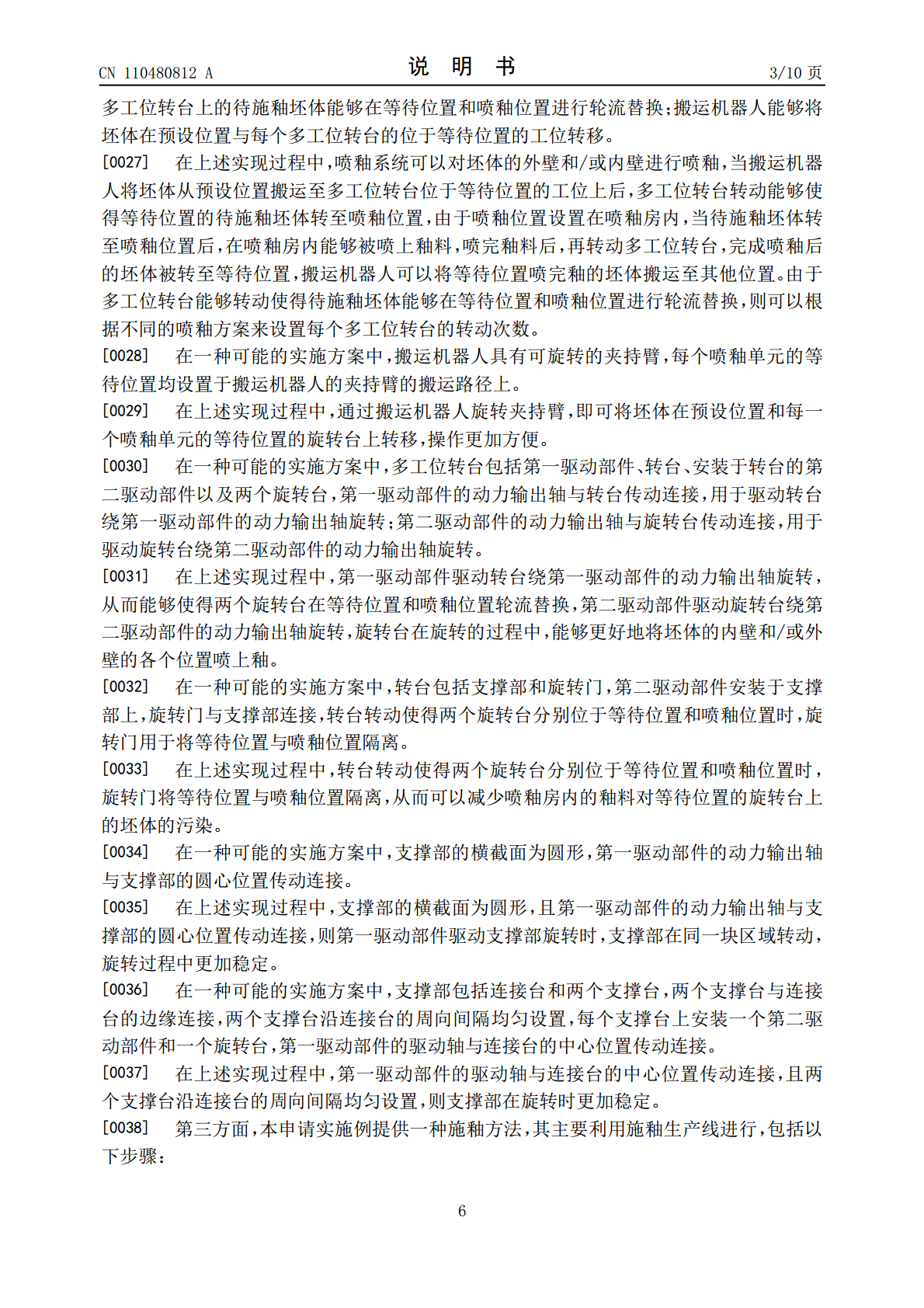
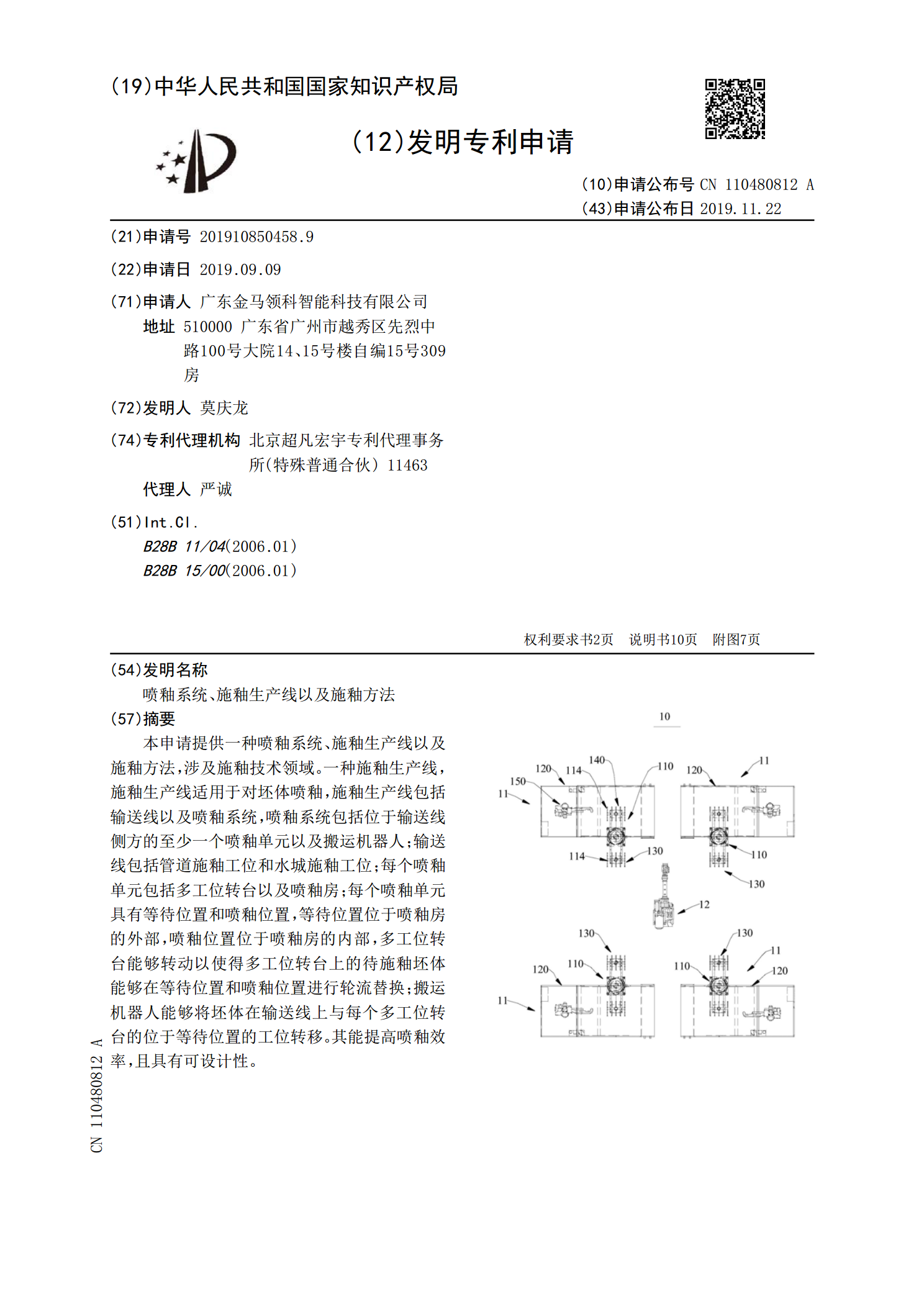
本申请提供一种喷釉系统、施釉生产线以及施釉方法,涉及施釉技术领域。一种施釉生产线,施釉生产线适用于对坯体喷釉,施釉生产线包括输送线以及喷釉系统,喷釉系统包括位于输送线侧方的至少一个喷釉单元以及搬运机器人;输送线包括管道施釉工位和水城施釉工位;每个喷釉单元包括多工位转台以及喷釉房;每个喷釉单元具有等待位置和喷釉位置,等待位置位于喷釉房的外部,喷釉位置位于喷釉房的内部,多工位转台能够转动以使得多工位转台上的待施釉坯体能够在等待位置和喷釉位置进行轮流替换;搬运机器人能够将坯体在输送线上与每个多工位转台的位于等待

自动施釉系统.pdf
一种自动施釉系统,包括托盘、传动机构,传动机构包括驱动系统、传动轴和传动链,施釉系统还包括施釉橱、施釉装置、转动装置,施釉橱扣装在机架上;施釉橱顶部装有釉料喷头;喷釉管道和收釉管道与喷釉控制系统连接受控;多条喷釉管道与施釉橱顶部的釉料喷头连接;齿条安装在机架上,齿轮与中心轴底端连接,中心轴中部与连接板活动连接,中心轴顶端与托盘底面连接;连接板两端与传动链连接。本发明结构简单,将坯件施釉部分从整条施釉生产线中进行隔绝,工人只需在指定位置上坯下坯,施釉工序自动完成,减少工人与釉料的接触,避免对工人的身体造成伤

一种茶叶盏的施釉方法、施釉机构、茶叶盏.pdf
本发明公开一种茶叶盏的施釉方法,包括以下步骤:步骤一、在搪瓷杯或沙锅内将石灰水煮沸后放入洗净的叶子,煮沸,并用筷子拨动叶子,使其均匀受热、煮沸5min,待叶子变黑后,捞取叶子,放入清水中,再逐片进行叶肉与叶脉的分离;步骤二、将煮后的叶子放在手掌上或玻璃板上,用牙刷柄的光滑处在叶面上擦试,擦掉叶肉,然后在水龙头下面冲洗,继续擦试,直到叶肉全部去掉;步骤三、将去肉的茶叶,粘上秞水,固定在盏胚的内底上,再上秞水。本发明还公开一种茶叶盏的外表面施釉方法。本发明的茶叶盏上釉水后其盏胚经1200℃烧制,茶叶炭化留下模

陶瓷施釉技法.pptx
会计学坭兴陶的局部(júbù)上釉坭兴陶的局部(júbù)上釉坭兴陶的局部(júbù)上釉釉的概念(gàiniàn)釉的作用(zuòyòng)釉的作用(zuòyòng)釉的作用(zuòyòng)釉的种类(zhǒnglèi)施釉技法(jìfǎ)施釉技法(jìfǎ)——补水注意施釉技法(jìfǎ)——施釉注意施釉技法(jìfǎ)——其它施釉技法(jìfǎ)附:《施釉技法》课程(kèchéng)教学大纲感谢您的观看(guānkàn)!

陶瓷施釉技法.ppt
陶瓷工艺学——施釉技法施釉技法坭兴陶的局部上釉坭兴陶的局部上釉坭兴陶的局部上釉釉的概念釉的作用釉的作用釉的作用釉的种类施釉技法施釉技法——补水注意施釉技法——施釉注意施釉技法——其它施釉技法附:《施釉技法》课程教学大纲