
一种基于机器视觉的砂轮修整方法及装置.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于机器视觉的砂轮修整方法及装置.pdf
本发明涉及一种基于机器视觉的砂轮修整方法及装置,该砂轮的修整方法通过采集砂轮旋转时多幅原始轮廓图像,将所有原始轮廓图像叠加在一起,找出表示砂轮最外侧的像素边缘点,通过对像素边缘点的分析找出相应的修整量使砂轮工作层的平均出刃高度最大,出刃高度离散度最小;减小出刃高度离散度,使单位时间内同时参与磨削的磨料数量增加,提高平均出刃高度以保证砂轮工作层的容屑空间,使得修整后的砂轮具有更好的磨削效果,可用于精密磨削,有助于提高修整后的砂轮磨削性能的稳定性。

一种基于机器视觉的砂轮修整方法及装置.pdf
本发明涉及一种基于机器视觉的砂轮修整方法及装置,该砂轮的修整方法通过砂轮旋转时得到多处位置的轮廓线信息,将获取的轮廓线信息经过分段处理得到基础线段,以相同位置的基础线段的最大极差作为工作层的跳动,能够准确的计算出工作层跳动量,从而据此进行修整,降低了工作层跳动,提高了砂轮轮廓精度,使得修整后的砂轮具有更好的磨削效果,可用于精密磨削,有助于提高修整后的砂轮磨削性能的稳定性。
一种基于视觉检测激光修整成型砂轮装置及其修整方法.pdf
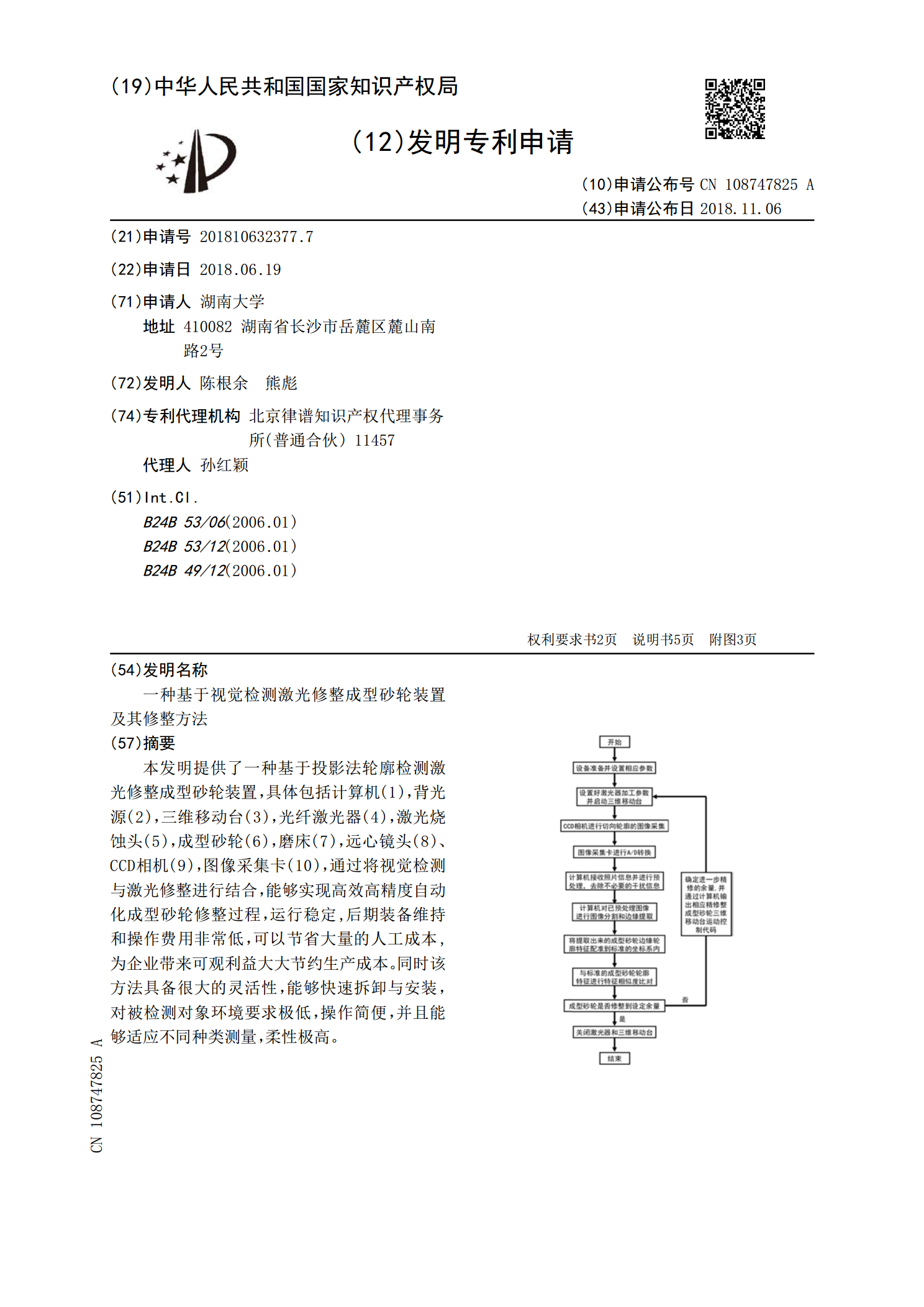
本发明提供了一种基于投影法轮廓检测激光修整成型砂轮装置,具体包括计算机(1),背光源(2),三维移动台(3),光纤激光器(4),激光烧蚀头(5),成型砂轮(6),磨床(7),远心镜头(8)、CCD相机(9),图像采集卡(10),通过将视觉检测与激光修整进行结合,能够实现高效高精度自动化成型砂轮修整过程,运行稳定,后期装备维持和操作费用非常低,可以节省大量的人工成本,为企业带来可观利益大大节约生产成本。同时该方法具备很大的灵活性,能够快速拆卸与安装,对被检测对象环境要求极低,操作简便,并且能够适应不同种类测

一种砂轮修锐修整的图像视觉监控装置及方法.pdf
本发明公开了一种砂轮修锐修整的图像视觉监控装置,包括:图像采集装置,用于拍摄砂轮表面微磨粒出刃的三维形貌图像;图像与机器视觉处理系统,通过三维重构方法将磨粒三维点云形貌展现出来;CNC集成控制系统,用于根据磨粒三维点云形貌观察磨粒出刃状况,自适应调节砂轮修锐修整工艺参数,从而实现砂轮修锐修整的在线监控与智能控制。本发明还提供了一种砂轮修锐修整的图像视觉监控方法。本发明采用高清CCD摄像头及图像与机器视觉处理系统,对砂轮表面磨粒出刃形貌进行特征提取与三维点云形貌重建,还原磨粒出刃状态,再反馈给机床CNC控制

基于双端面加工的砂轮修整方法及装置.pdf
一种基于双端面加工的砂轮修整方法和装置,采用两个工具轮的双端面同时对安装在工件轴上的工件双侧面进行修整加工;工具轮为杯形砂轮或碗形砂轮或蝶形砂轮,工件为超硬材料砂轮。本发明可用于超硬材料砂轮(厚度0.5-10.0mm)双侧面的修整加工。由于采用了端面加工,增大了工具轮与工件接触区面积;同时由于在工件的两侧面各设置了一个工具轮,当两个工具轮同时相向运动而对工件进行修整加工时,两工具轮对工件的法向作用力大小相等、方向相反,两者相互抵消。因此提高了系统刚性和加工精度。