
基于A-Star算法与模糊控制融合的移动机器人路径规划的综述报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于A-Star算法与模糊控制融合的移动机器人路径规划的综述报告.docx
基于A-Star算法与模糊控制融合的移动机器人路径规划的综述报告1.引言移动机器人是现代科学技术中的一项重要研究领域,其可广泛应用于生产制造、医疗保健、军事防卫等多个领域。在日常生活中,我们常常可以看到种类各异的移动机器人,如洗地机器人、搬运机器人、巡检机器人等等。其中,移动机器人的路径规划技术显得尤为重要,它可以有效地解决机器人工作时所面临的复杂环境、不确定性因素等问题,提高机器人的工作效率和质量,降低了人工干预的依赖程度。以往的研究中,较为流行的路径规划算法有Dijkstra算法、Bellman-Fo

基于模糊控制的移动机器人机电系统及局部路径规划的研究的综述报告.docx
基于模糊控制的移动机器人机电系统及局部路径规划的研究的综述报告随着现代机器人技术的不断发展,移动机器人的应用也越来越广泛。然而,移动机器人的机电系统系统和路径规划需要高精度和高可靠性,因此研究移动机器人机电系统及局部路径规划成为了关键的研究领域之一。本文将从基于模糊控制的角度出发,综述移动机器人机电系统及局部路径规划的研究现状和发展趋势。一、基于模糊控制的移动机器人机电系统移动机器人的机电系统包括电机、减速器、驱动器、轮胎和落地杆等部分。机电系统的控制是移动机器人正常运行的关键环节。在目前的研究中,基于模
一种融合Astar与DWA算法的移动小车路径规划方法.pdf
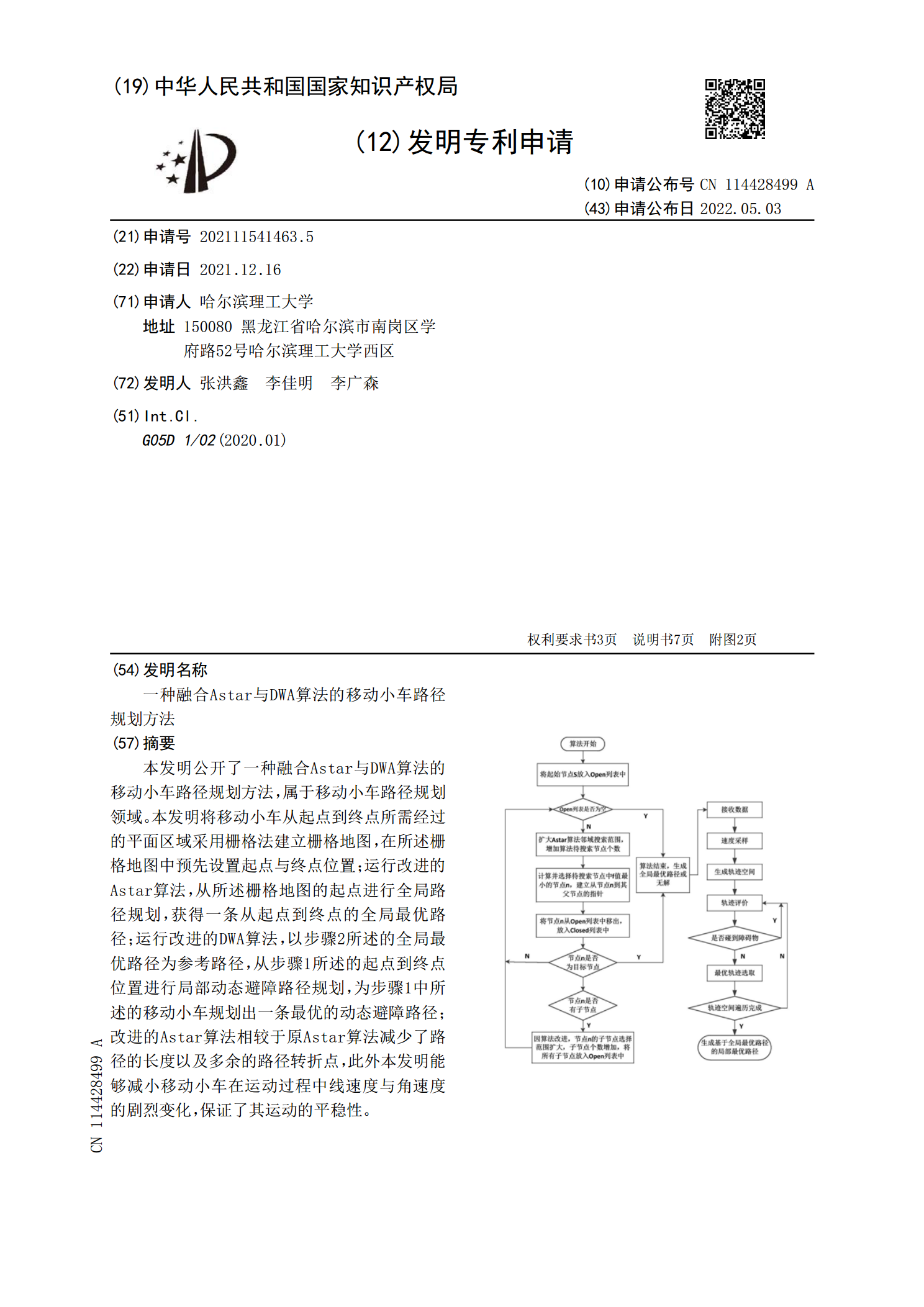
本发明公开了一种融合Astar与DWA算法的移动小车路径规划方法,属于移动小车路径规划领域。本发明将移动小车从起点到终点所需经过的平面区域采用栅格法建立栅格地图,在所述栅格地图中预先设置起点与终点位置;运行改进的Astar算法,从所述栅格地图的起点进行全局路径规划,获得一条从起点到终点的全局最优路径;运行改进的DWA算法,以步骤2所述的全局最优路径为参考路径,从步骤1所述的起点到终点位置进行局部动态避障路径规划,为步骤1中所述的移动小车规划出一条最优的动态避障路径;改进的Astar算法相较于原Astar算

基于模糊控制算法的移动机器人路径纠偏研究.docx
基于模糊控制算法的移动机器人路径纠偏研究基于模糊控制算法的移动机器人路径纠偏研究摘要:移动机器人路径规划是机器人导航领域的一个重要研究方向。在实际应用中,由于环境的复杂性和动态性,移动机器人可能会受到各种干扰导致路径偏离预期轨迹。因此,针对路径偏离问题的研究具有重要意义。本文提出了一种基于模糊控制算法的移动机器人路径纠偏方法。该方法通过分析机器人当前位置与期望路径的偏差,采用模糊控制算法进行动态调整,以使机器人能够纠正路径偏差并重新回到预定轨迹。实验结果表明,该方法在面对各种干扰时能够有效地纠正机器人的路

基于微粒群算法的移动机器人路径规划研究的综述报告.docx
基于微粒群算法的移动机器人路径规划研究的综述报告近年来,随着移动机器人的普及和应用,路径规划作为其中重要的一环也备受关注。微粒群算法(ParticleSwarmOptimization,PSO)是一种典型的群体智能优化方法,具有全局搜索能力、易于实现等优点,因此在移动机器人路径规划中得到广泛应用。本文将基于相关文献,就基于微粒群算法的移动机器人路径规划研究进行综述。1.微粒群算法的基本原理微粒群算法将候选解向更好的解移动,从而寻找最优解。首先,将优化过程看作一个多维空间,候选解在空间中不断寻找最优解。每个