
一种融合Astar与DWA算法的移动小车路径规划方法.pdf

是你****韵呀


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种融合Astar与DWA算法的移动小车路径规划方法.pdf
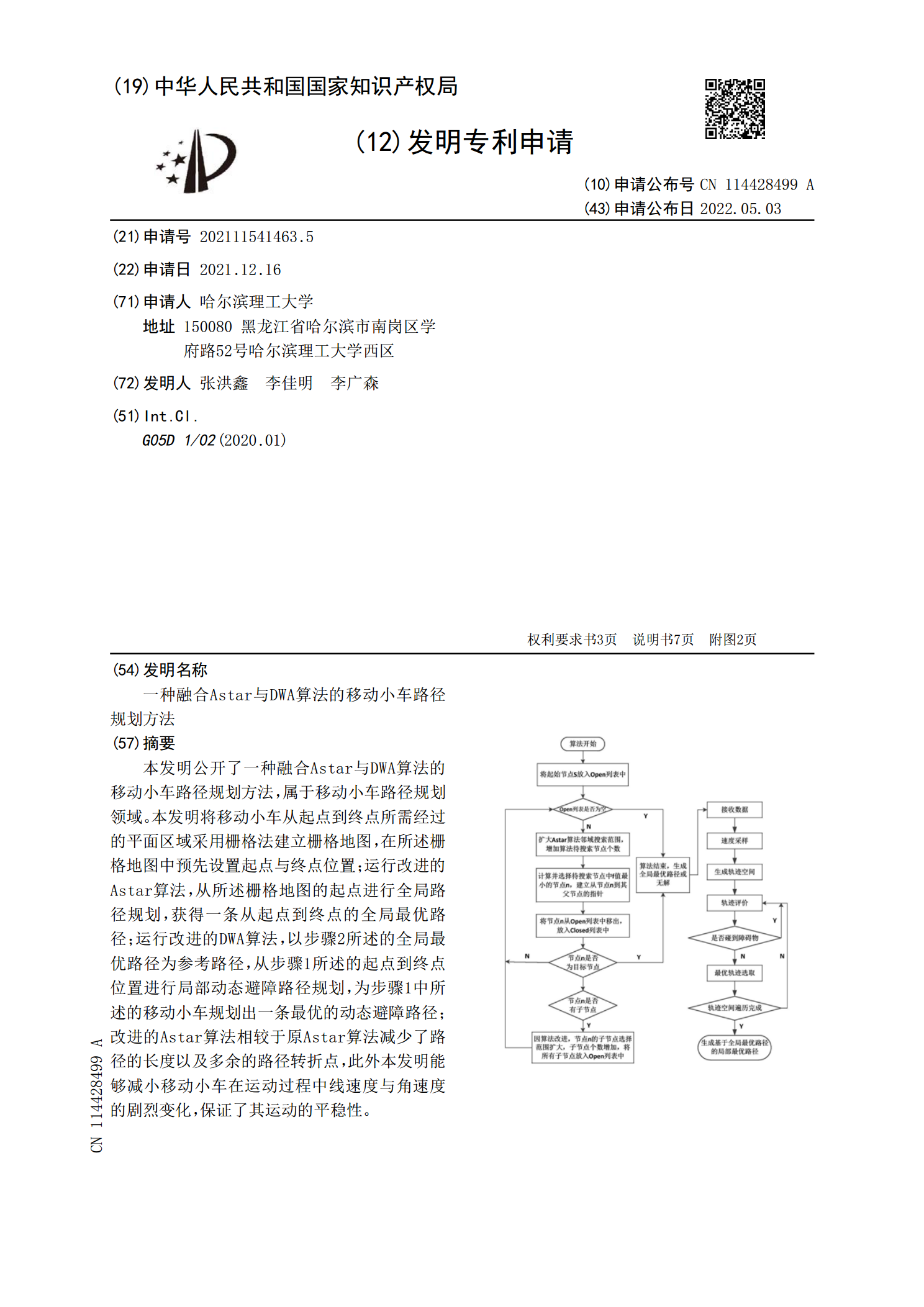
本发明公开了一种融合Astar与DWA算法的移动小车路径规划方法,属于移动小车路径规划领域。本发明将移动小车从起点到终点所需经过的平面区域采用栅格法建立栅格地图,在所述栅格地图中预先设置起点与终点位置;运行改进的Astar算法,从所述栅格地图的起点进行全局路径规划,获得一条从起点到终点的全局最优路径;运行改进的DWA算法,以步骤2所述的全局最优路径为参考路径,从步骤1所述的起点到终点位置进行局部动态避障路径规划,为步骤1中所述的移动小车规划出一条最优的动态避障路径;改进的Astar算法相较于原Astar算
一种融合改进的A*与DWA算法的室内移动机器人路径规划方法.pdf
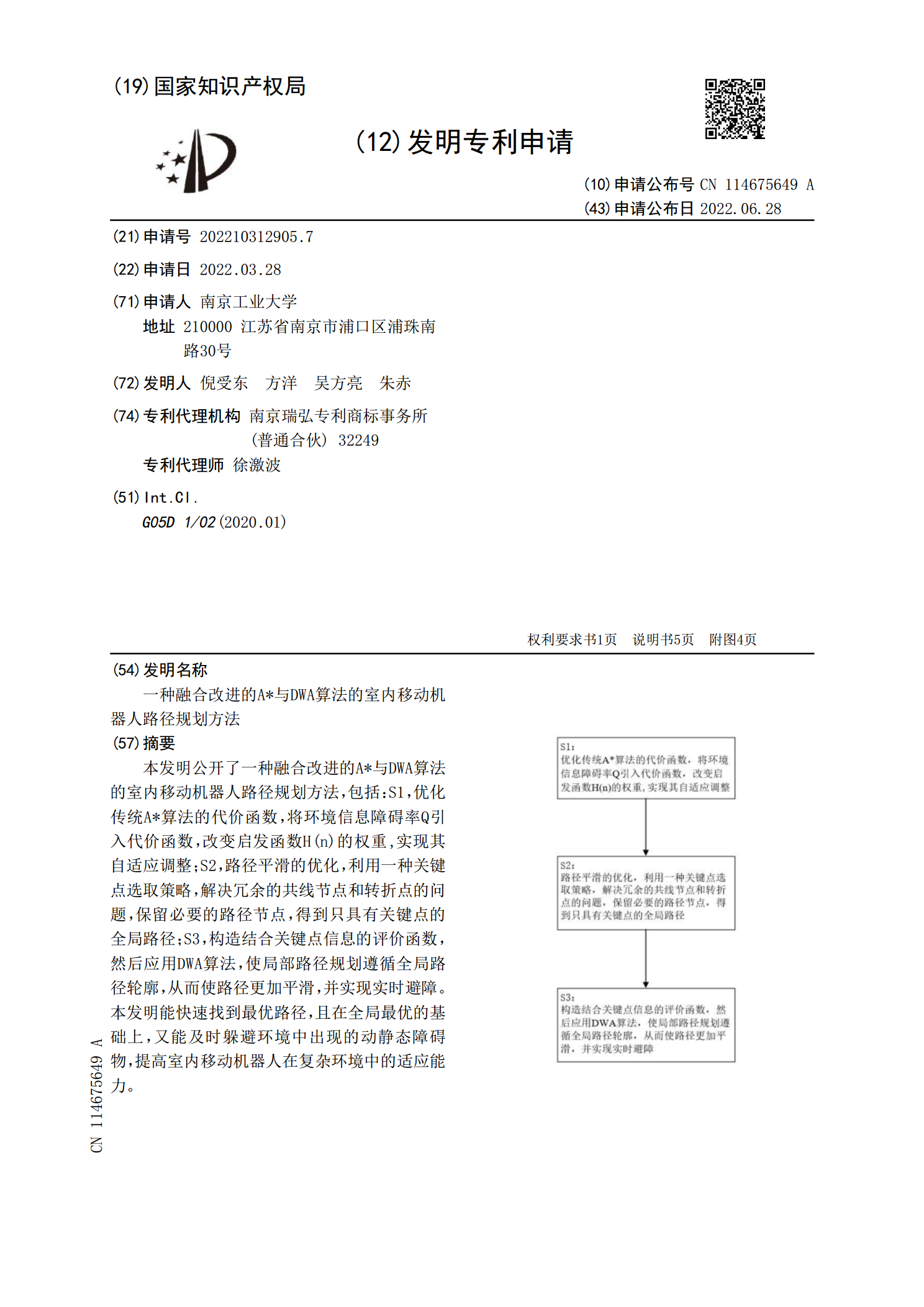
本发明公开了一种融合改进的A*与DWA算法的室内移动机器人路径规划方法,包括:S1,优化传统A*算法的代价函数,将环境信息障碍率Q引入代价函数,改变启发函数H(n)的权重,实现其自适应调整;S2,路径平滑的优化,利用一种关键点选取策略,解决冗余的共线节点和转折点的问题,保留必要的路径节点,得到只具有关键点的全局路径;S3,构造结合关键点信息的评价函数,然后应用DWA算法,使局部路径规划遵循全局路径轮廓,从而使路径更加平滑,并实现实时避障。本发明能快速找到最优路径,且在全局最优的基础上,又能及时躲避环境中出

改进JPS算法融合DWA的多机器人路径规划.docx
改进JPS算法融合DWA的多机器人路径规划目录一、内容概览................................................21.1背景与意义...........................................21.2国内外研究现状.......................................31.3研究内容与方法.......................................4二、相关理论概述.................
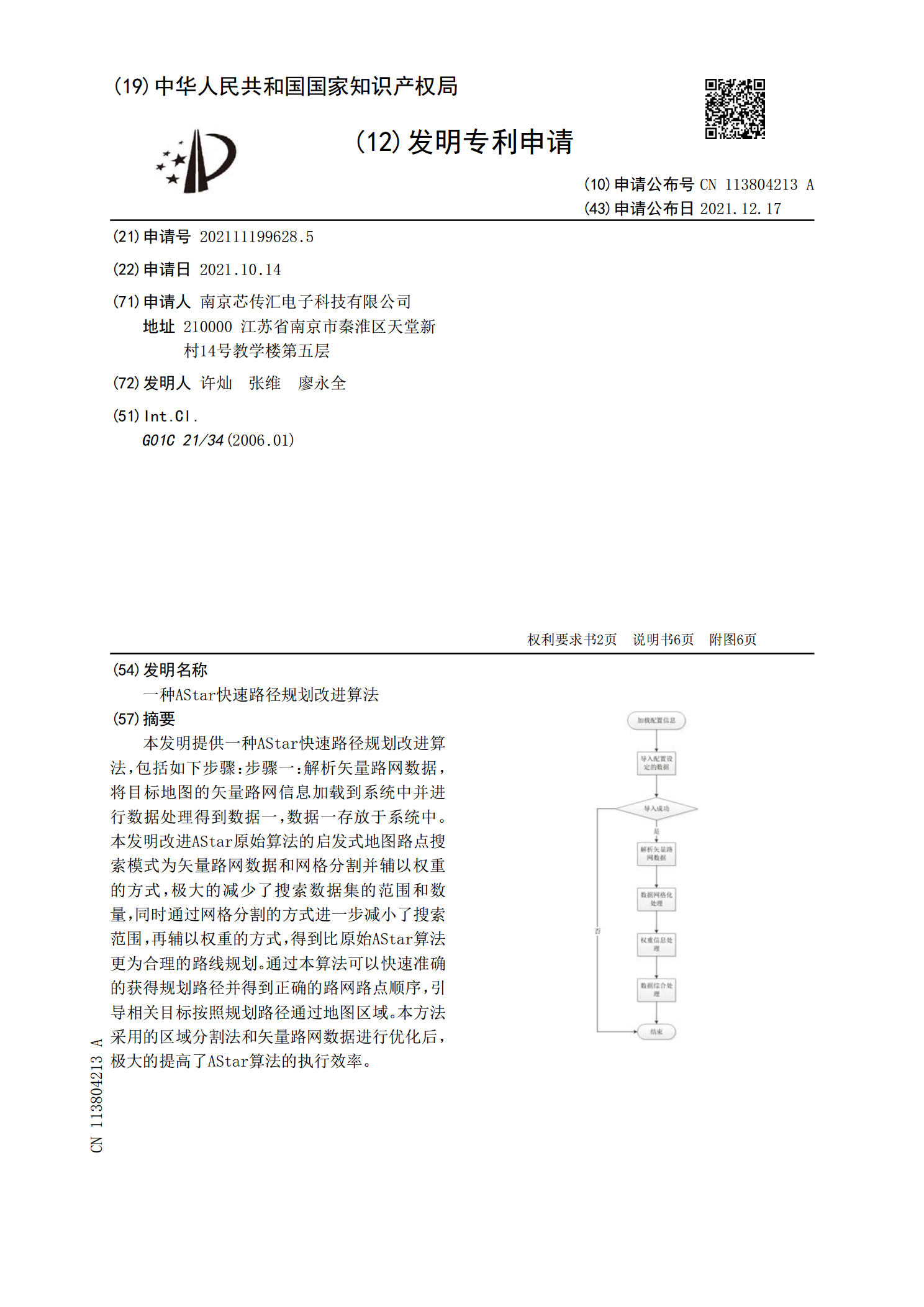
一种AStar快速路径规划改进算法.pdf
本发明提供一种AStar快速路径规划改进算法,包括如下步骤:步骤一:解析矢量路网数据,将目标地图的矢量路网信息加载到系统中并进行数据处理得到数据一,数据一存放于系统中。本发明改进AStar原始算法的启发式地图路点搜索模式为矢量路网数据和网格分割并辅以权重的方式,极大的减少了搜索数据集的范围和数量,同时通过网格分割的方式进一步减小了搜索范围,再辅以权重的方式,得到比原始AStar算法更为合理的路线规划。通过本算法可以快速准确的获得规划路径并得到正确的路网路点顺序,引导相关目标按照规划路径通过地图区域。本方法
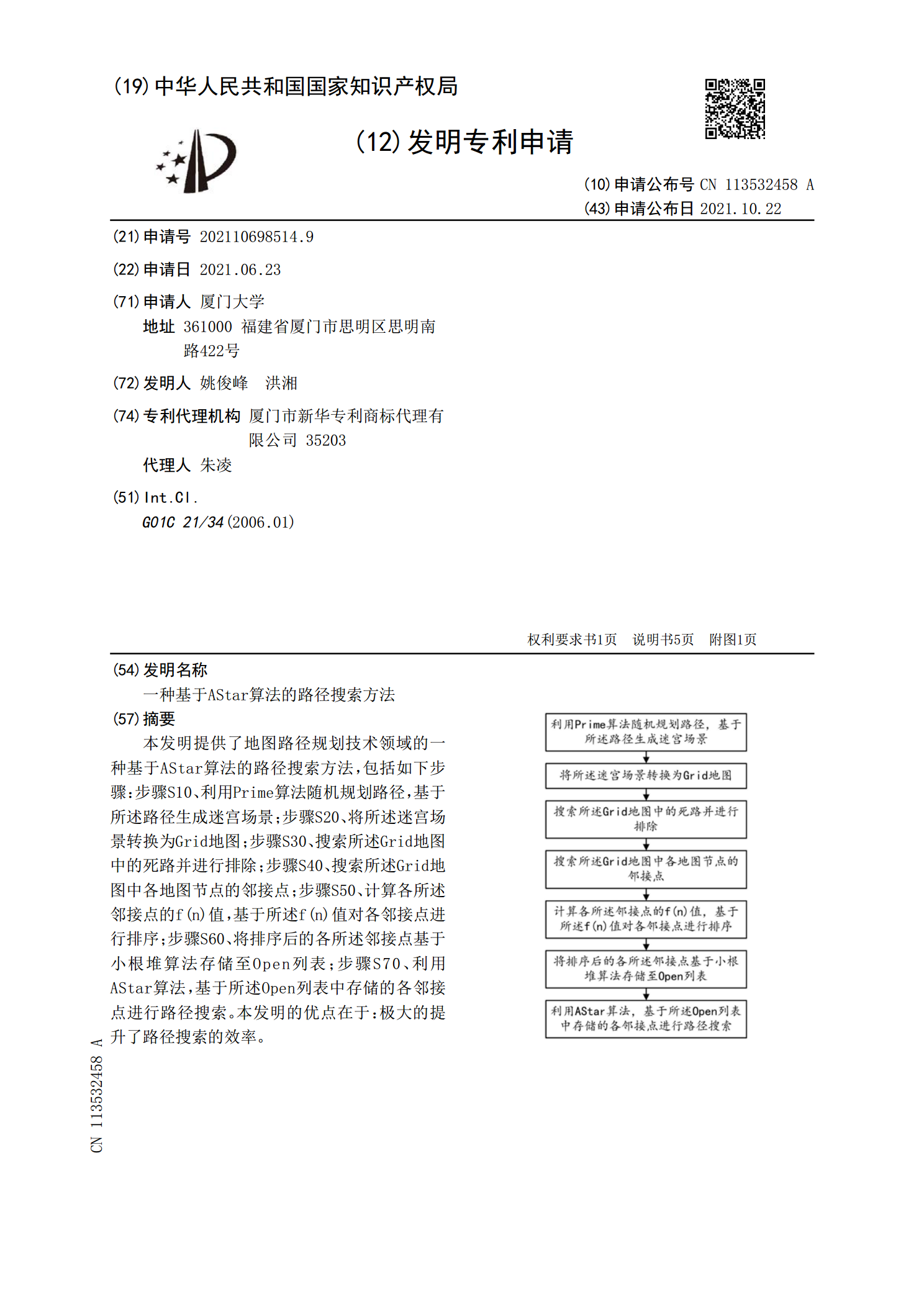
一种基于AStar算法的路径搜索方法.pdf
本发明提供了地图路径规划技术领域的一种基于AStar算法的路径搜索方法,包括如下步骤:步骤S10、利用Prime算法随机规划路径,基于所述路径生成迷宫场景;步骤S20、将所述迷宫场景转换为Grid地图;步骤S30、搜索所述Grid地图中的死路并进行排除;步骤S40、搜索所述Grid地图中各地图节点的邻接点;步骤S50、计算各所述邻接点的f(n)值,基于所述f(n)值对各邻接点进行排序;步骤S60、将排序后的各所述邻接点基于小根堆算法存储至Open列表;步骤S70、利用AStar算法,基于所述Open列表中