
一种平地机电控手柄转向控制方法、装置及系统.pdf

霞英****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种平地机电控手柄转向控制方法、装置及系统.pdf
本发明公开了一种平地机电控手柄转向控制方法、装置及系统,通过对平地机的行驶速度进行监控,当平地机在不同的行驶速度下采用不同的比例系数控制前轮转向速率,该系统可以满足在平地机电控手柄摆动相同的情况下,高速行驶时前轮转角响应到目标转向角时所需的时间比低速时前轮转角响应到目标角度的时间要长,最终实现在高速行驶时单位时间内前轮转向幅度比低速前轮转向幅度小的控制效果,以保证平地机在高速行驶时转向行车安全,提高整机可靠性。
一种电控转向装置及其控制方法.pdf
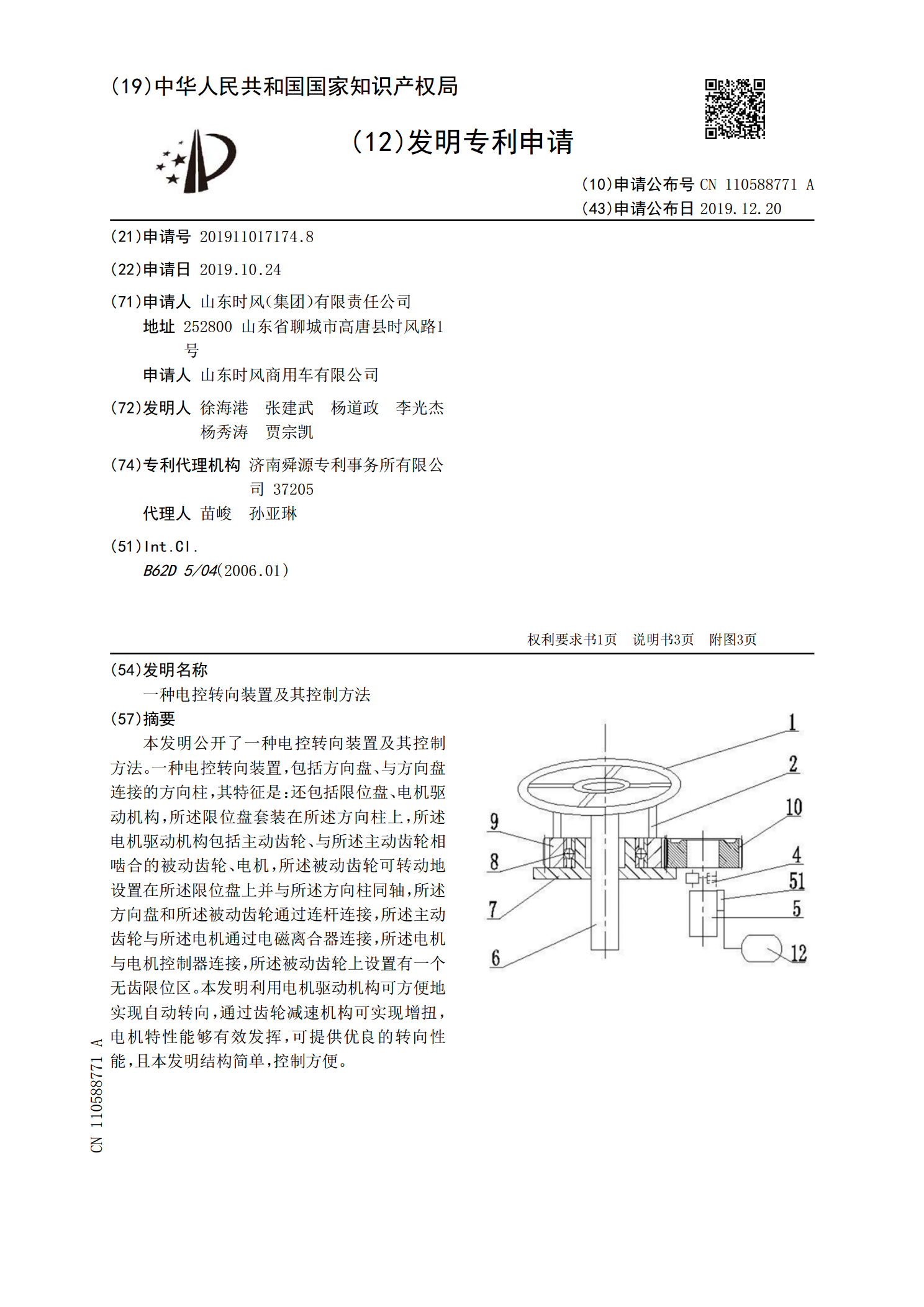
本发明公开了一种电控转向装置及其控制方法。一种电控转向装置,包括方向盘、与方向盘连接的方向柱,其特征是:还包括限位盘、电机驱动机构,所述限位盘套装在所述方向柱上,所述电机驱动机构包括主动齿轮、与所述主动齿轮相啮合的被动齿轮、电机,所述被动齿轮可转动地设置在所述限位盘上并与所述方向柱同轴,所述方向盘和所述被动齿轮通过连杆连接,所述主动齿轮与所述电机通过电磁离合器连接,所述电机与电机控制器连接,所述被动齿轮上设置有一个无齿限位区。本发明利用电机驱动机构可方便地实现自动转向,通过齿轮减速机构可实现增扭,电机特性
一种装载机电控手柄转向和智能制动控制系统.pdf
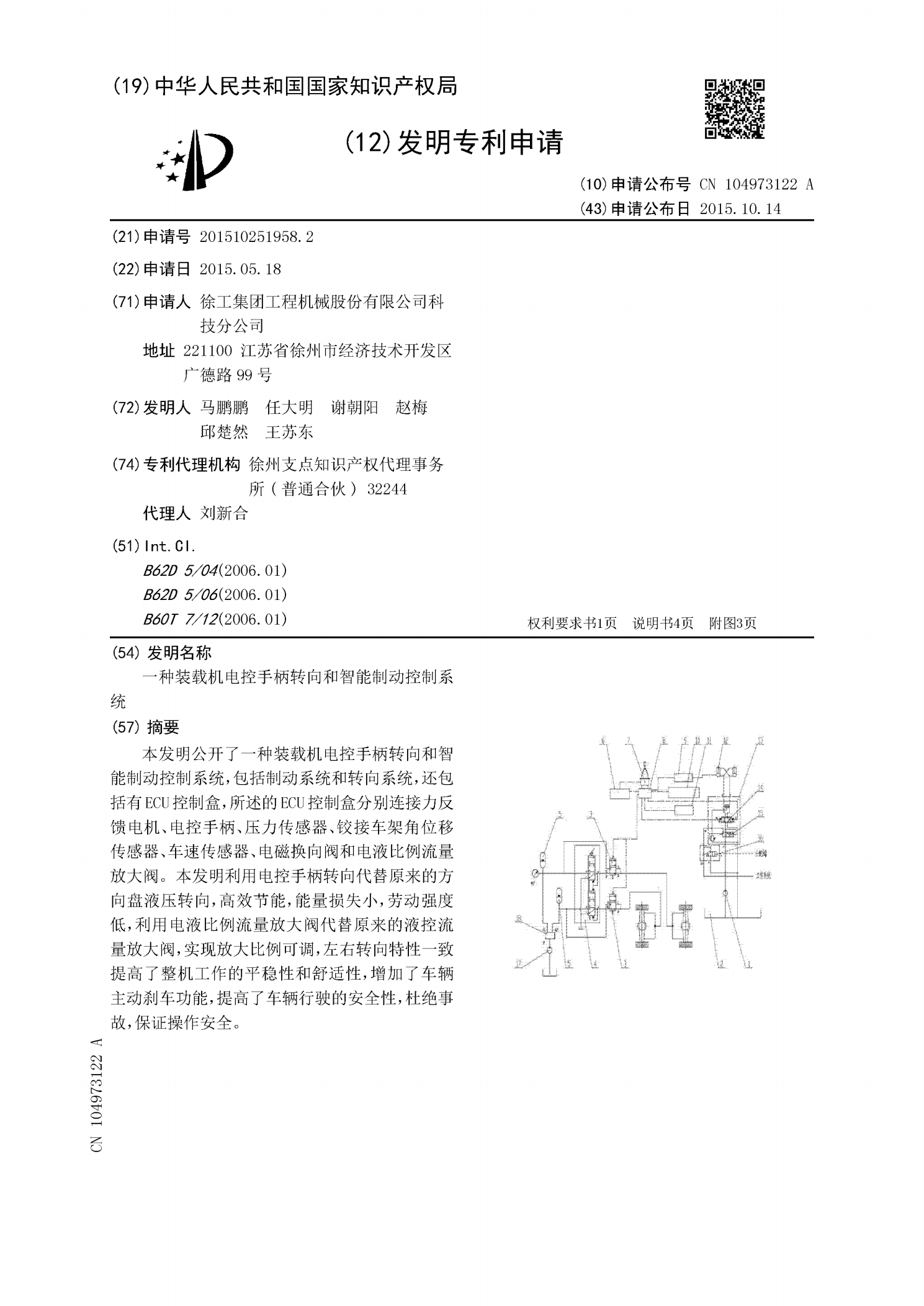
本发明公开了一种装载机电控手柄转向和智能制动控制系统,包括制动系统和转向系统,还包括有ECU控制盒,所述的ECU控制盒分别连接力反馈电机、电控手柄、压力传感器、铰接车架角位移传感器、车速传感器、电磁换向阀和电液比例流量放大阀。本发明利用电控手柄转向代替原来的方向盘液压转向,高效节能,能量损失小,劳动强度低,利用电液比例流量放大阀代替原来的液控流量放大阀,实现放大比例可调,左右转向特性一致提高了整机工作的平稳性和舒适性,增加了车辆主动刹车功能,提高了车辆行驶的安全性,杜绝事故,保证操作安全。

一种电控阻尼驱动转向装置以及电控阻尼驱动转向方法.pdf
本发明公开了一种电控阻尼驱动转向装置以及电控阻尼驱动转向方法,该装置包括:壳体;扭矩输入杆,所述扭矩输入杆的输出端伸至所述壳体的内部,且所述扭矩输入杆的输入端留在所述壳体的外部;转向调整总成,所述转向调整总成包括:螺杆轴、转向螺块、齿扇以及输出轴;所述螺杆轴的第一端与所述扭矩输入杆的输出端传动连接,且所述螺杆轴的第一端通过支撑座总成与所述壳体的内腔壁连接;所述螺杆轴的第二端通过第一轴承与所述壳体的内腔壁连接;所述转向螺块套设于所述螺杆轴上,且所述转向螺块的内螺纹与所述螺杆轴的外螺纹啮合传动。本发明可实现根

电控多桥转向车辆转角误差控制装置及系统控制方法.docx
电控多桥转向车辆转角误差控制装置及系统控制方法摘要随着科技的不断进步,交通安全问题日益引起社会关注。本文介绍了一种电控多桥转向车辆转角误差控制装置及系统控制方法,旨在提高车辆转向的准确性和安全性。该装置通过对车辆的转向角度和方向进行监测和控制,减小车辆在行驶过程中的转角误差,提高转向的精度和稳定性。本文详细介绍了该装置的工作原理和系统结构,并进行了仿真实验和路试实验,证明了该装置的有效性和实用性。本文对该装置的优劣势进行了分析和总结,并提出了进一步改进的思路。关键词:电控多桥转向车辆、转角误差控制、系统控