
一种适用于微型四扑翼飞行器的传动机构.pdf

Ch****49


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种适用于微型四扑翼飞行器的传动机构.pdf
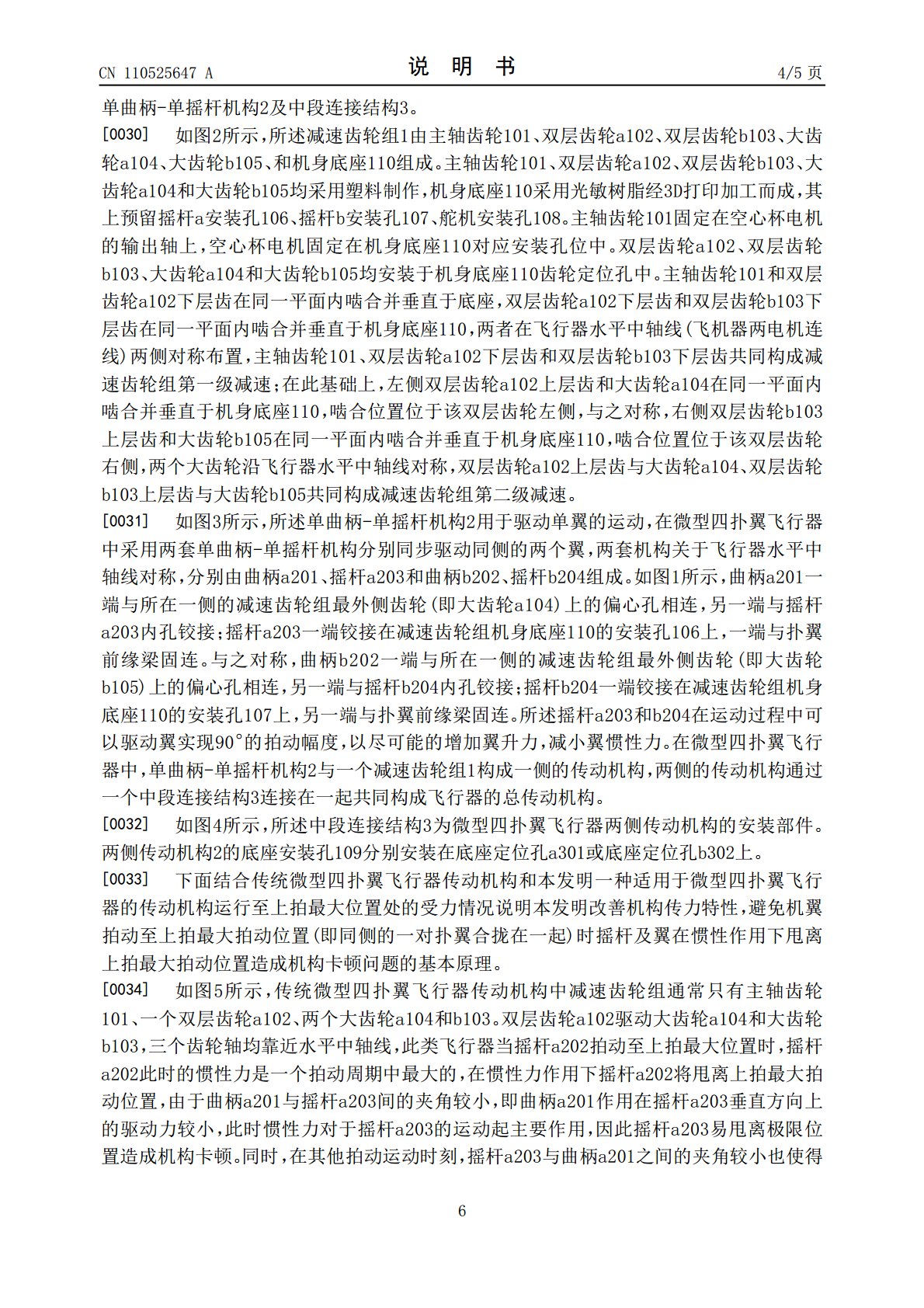
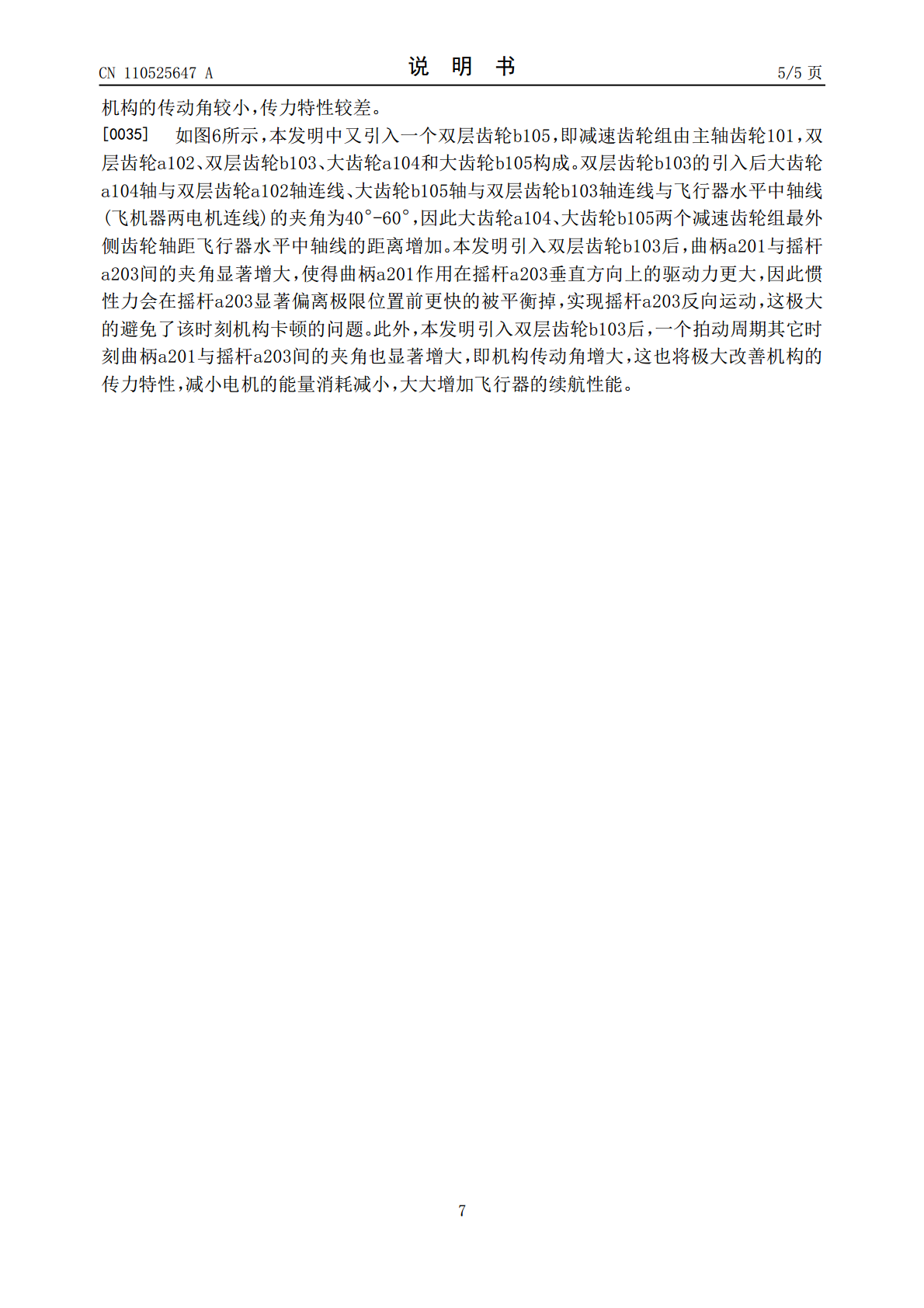
本发明公开了一种适用于微型四扑翼飞行器的传动机构,包括减速齿轮组、单曲柄‑单摇杆机构以及中段连接结构,其中的减速齿轮组包括机身底座,一个主轴齿轮,两双层齿轮和两个大齿轮,单曲柄‑单摇杆机构包括一个曲柄和一个摇杆;两套单曲柄‑单摇杆机构与一个减速齿轮组构成微型四扑翼飞行器一侧的传动机构,两侧的传动机构通过中段连接结构连接在一起并沿飞行器垂直中轴线对称共同构成飞行器的总传动机构。本发明通过使用两个双层齿轮增加大齿轮距飞行器水平中轴线的距离,增大摇杆运动过程中曲柄与摇杆间的夹角,改善机构传力特性,同时避免摇杆运

一种微型扑翼飞行器传动机构.pdf
本发明公开了一种微型扑翼飞行器传动机构,其特征在于,包括:主动轮、从动轮、连杆、扭转盘、滑槽;所述主动轮与从动轮位于同一个平面;主动轮与从动轮啮合;滑槽与主动轮之间设置有扭转盘,所述扭转盘可做扭转运动;所述连杆一端与扭转盘连接,另一端与从动轮连接;连杆带动滑槽往复运动;所述主动轮上固定有倾斜的细杆,细杆可在滑槽内滑动。本发明可以实现翅膀的扑动与扭转,从而理论上使飞行器产生升力与推力,结构简单轻巧。

一种扑翼飞行器的传动机构.pdf
本发明公开了一种扑翼飞行器的传动机构,包括依次连接的驱动装置、曲柄、摇杆、齿轮及翅膀,其中,在所述摇杆和齿轮之间还设有一齿条,所述齿条与所述摇杆的其中一端固定铰接,所述齿条的至少其中一个侧面呈齿形结构布置并与所述齿轮相啮合。本发明解决了原有的扑翼飞行器传动机构运行时翅膀往复扇动角度不大、传递功率不稳定、传动效率不高的问题。
一种微型扑翼飞行器.pdf
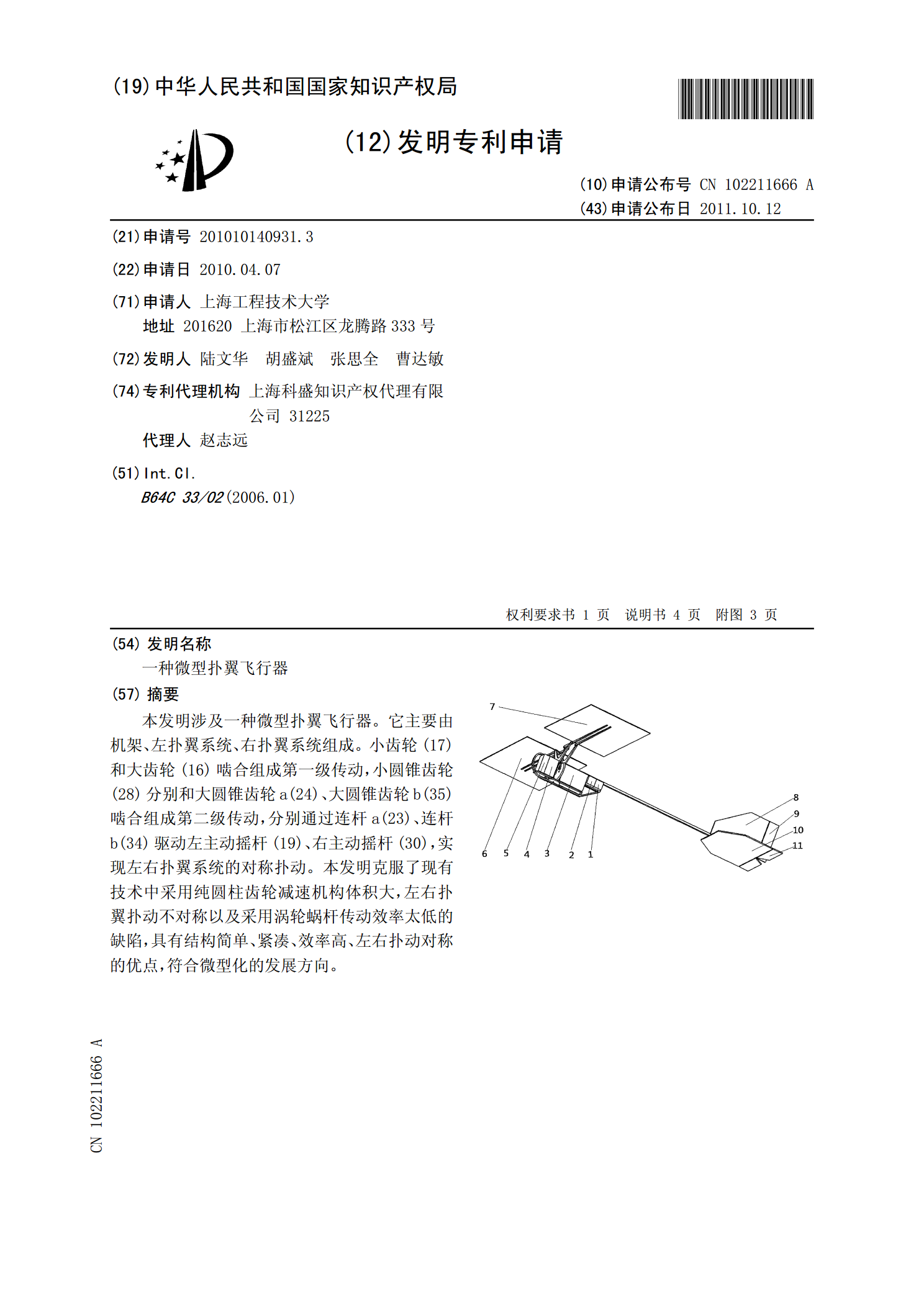
本发明涉及一种微型扑翼飞行器。它主要由机架、左扑翼系统、右扑翼系统组成。小齿轮(17)和大齿轮(16)啮合组成第一级传动,小圆锥齿轮(28)分别和大圆锥齿轮a(24)、大圆锥齿轮b(35)啮合组成第二级传动,分别通过连杆a(23)、连杆b(34)驱动左主动摇杆(19)、右主动摇杆(30),实现左右扑翼系统的对称扑动。本发明克服了现有技术中采用纯圆柱齿轮减速机构体积大,左右扑翼扑动不对称以及采用涡轮蜗杆传动效率太低的缺陷,具有结构简单、紧凑、效率高、左右扑动对称的优点,符合微型化的发展方向。

仿蜻蜓四翼微型扑翼飞行器.pdf
本发明公开了一种仿蜻蜓四翼微型扑翼飞行器,包括:机身、两个前扑动翼、两个带有连杆的前翼连接件、两个后扑动翼、两个带有连杆的后翼连接件、主动齿轮、轴齿轮、一级齿轮、两带有连杆的二级齿轮、两带有连杆的三级齿轮、两个前球头连杆、两个后球头连杆、两个舵机连杆、两个舵机、一个直流无刷电机。该仿蜻蜓微型扑翼飞行器基于仿生学设计,相较于现有的固定翼及旋翼飞行器,整体轻便,能源利用效率高,适应低雷诺数飞行环境,可广泛用于低速高机动性飞行的场景中。