
具有先导输入轴双向超越离合器机构.pdf

文光****iu

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
具有先导输入轴双向超越离合器机构.pdf
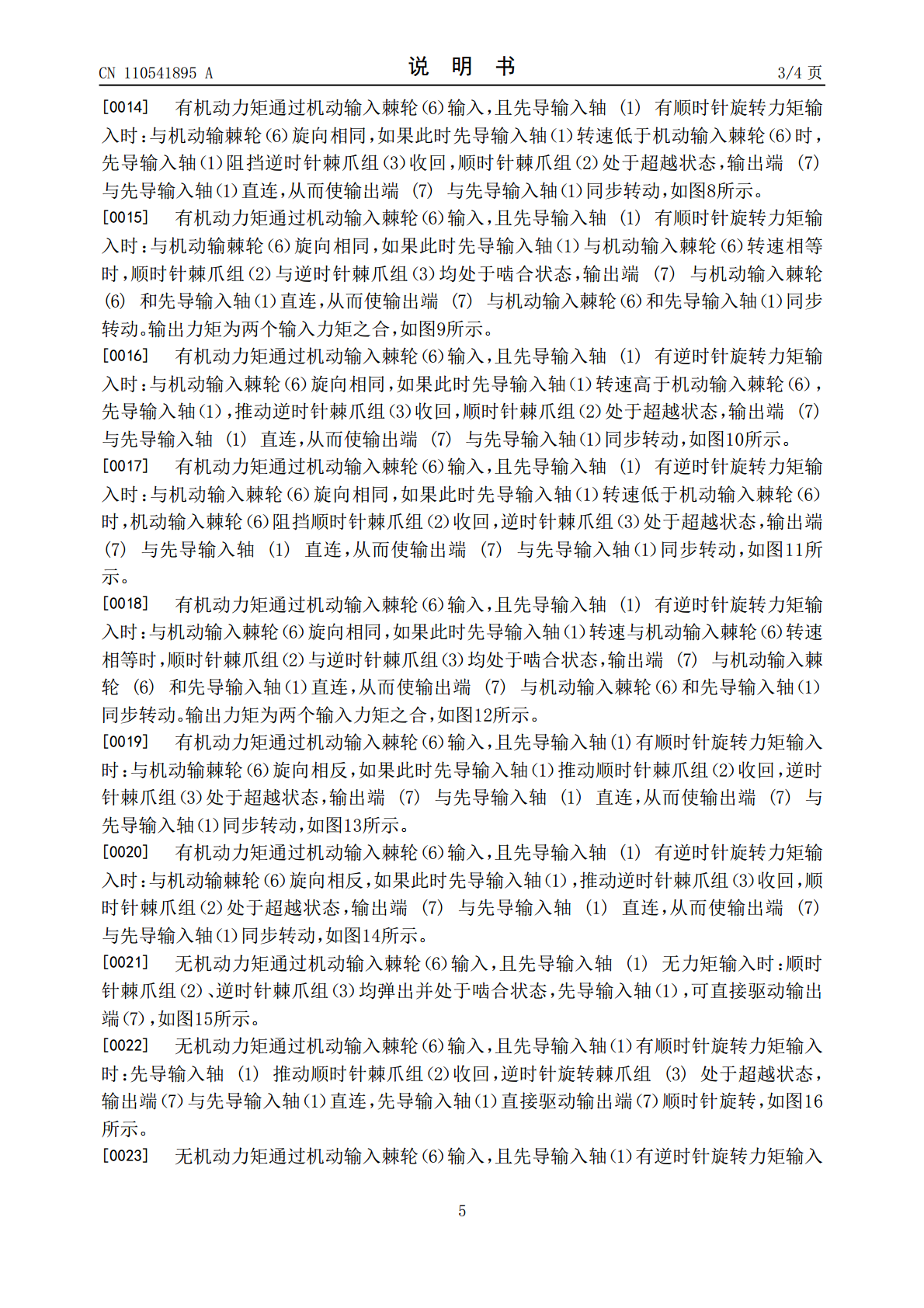
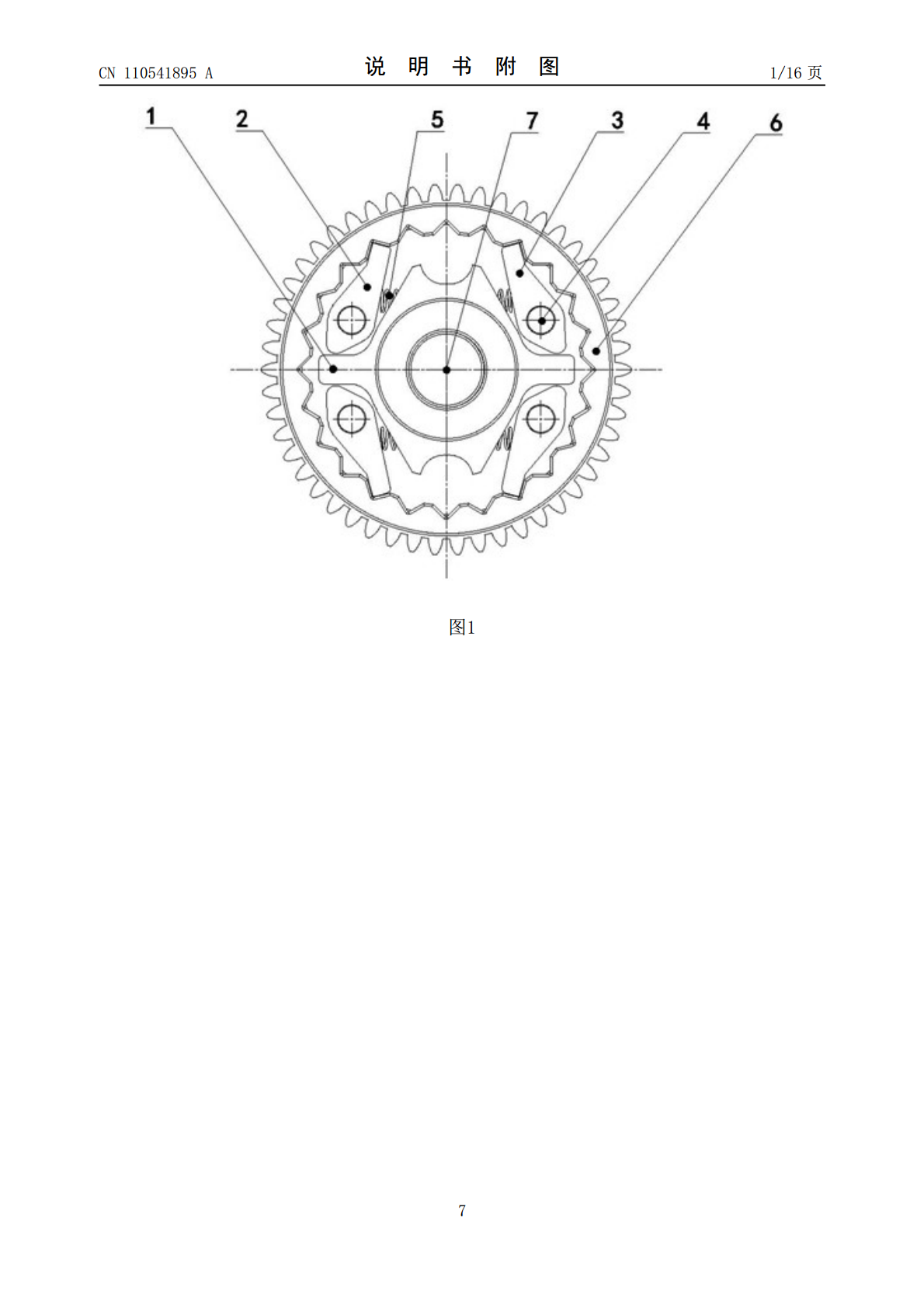
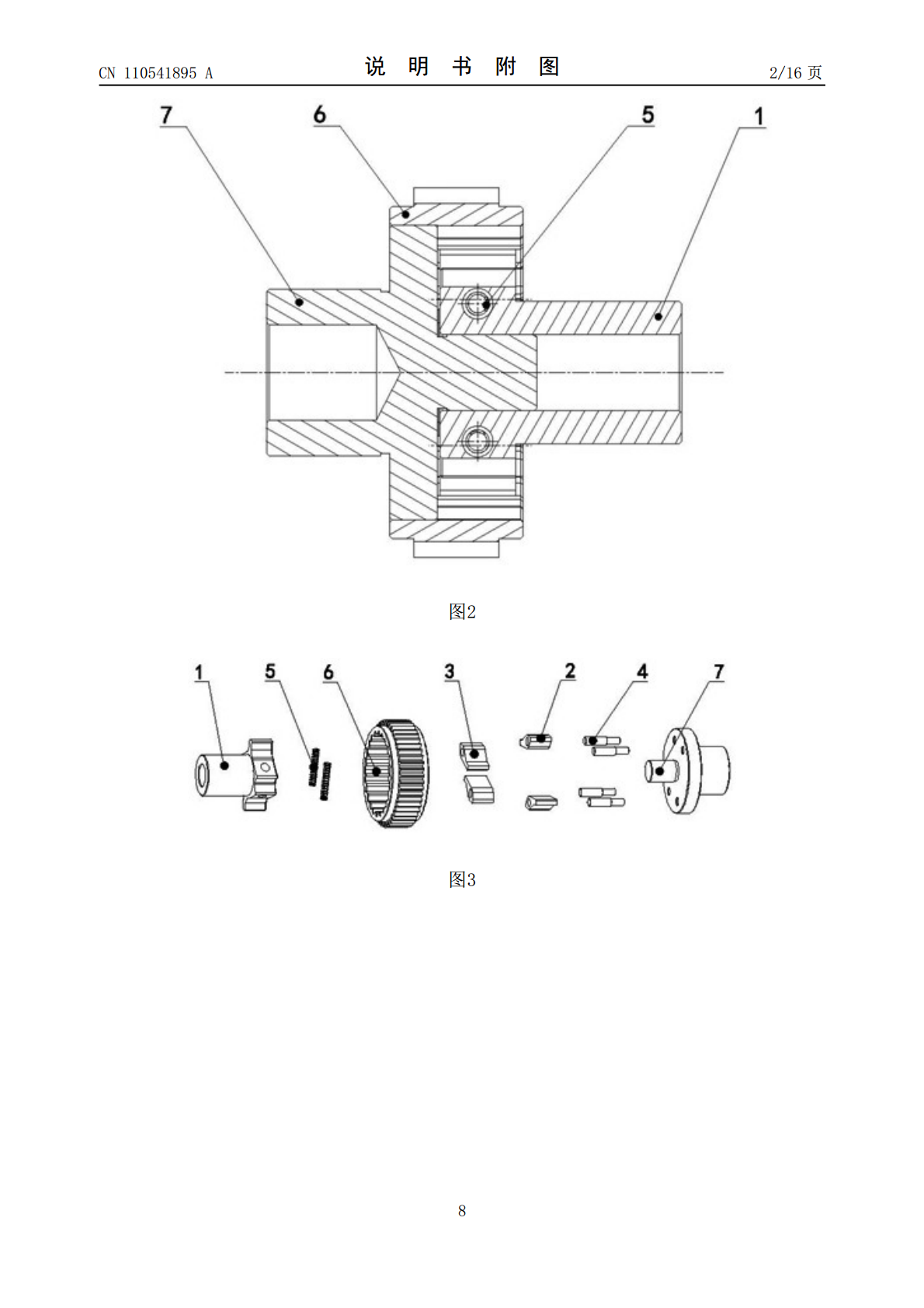
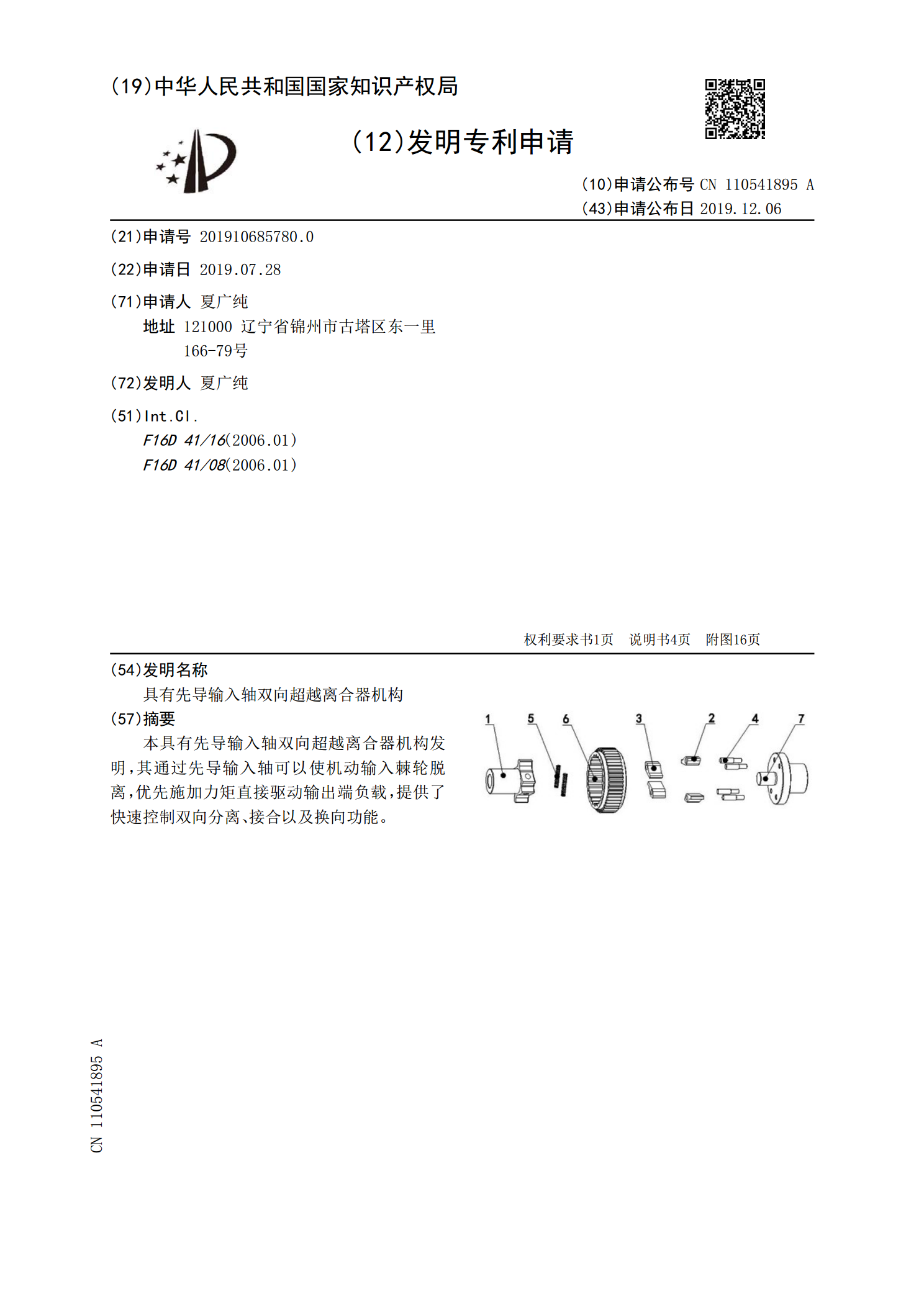
本具有先导输入轴双向超越离合器机构发明,其通过先导输入轴可以使机动输入棘轮脱离,优先施加力矩直接驱动输出端负载,提供了快速控制双向分离、接合以及换向功能。

正反双向输入变速机构.pdf
正反双向输入变速机构,其特征在于包括输入轴、输入齿轮、A齿轮、B齿轮、C齿轮、D齿轮、输出齿轮和输出轴,输入轴顺时针转动时,输入齿轮跟着逆时针转动,输入齿轮与A齿轮啮合,A齿轮反向转动,A齿轮带动B齿轮逆时针转动,B齿轮与输出齿轮相啮合,输出轴作正向转速获得一级速比的传动,与此同时输入齿轮与C齿轮啮合,C齿轮作正向转动,D齿轮与C齿轮分离;输入轴逆时针转动时,输入齿轮跟着作逆时针转动与C齿轮啮合,C齿轮顺时针转动带动D齿轮顺时针转动,D齿轮与介轮啮合,介轮作逆时针转动带动输出齿轮作顺时针转动,输出轴也作顺
具有分离保持架的双向超越离合器.pdf
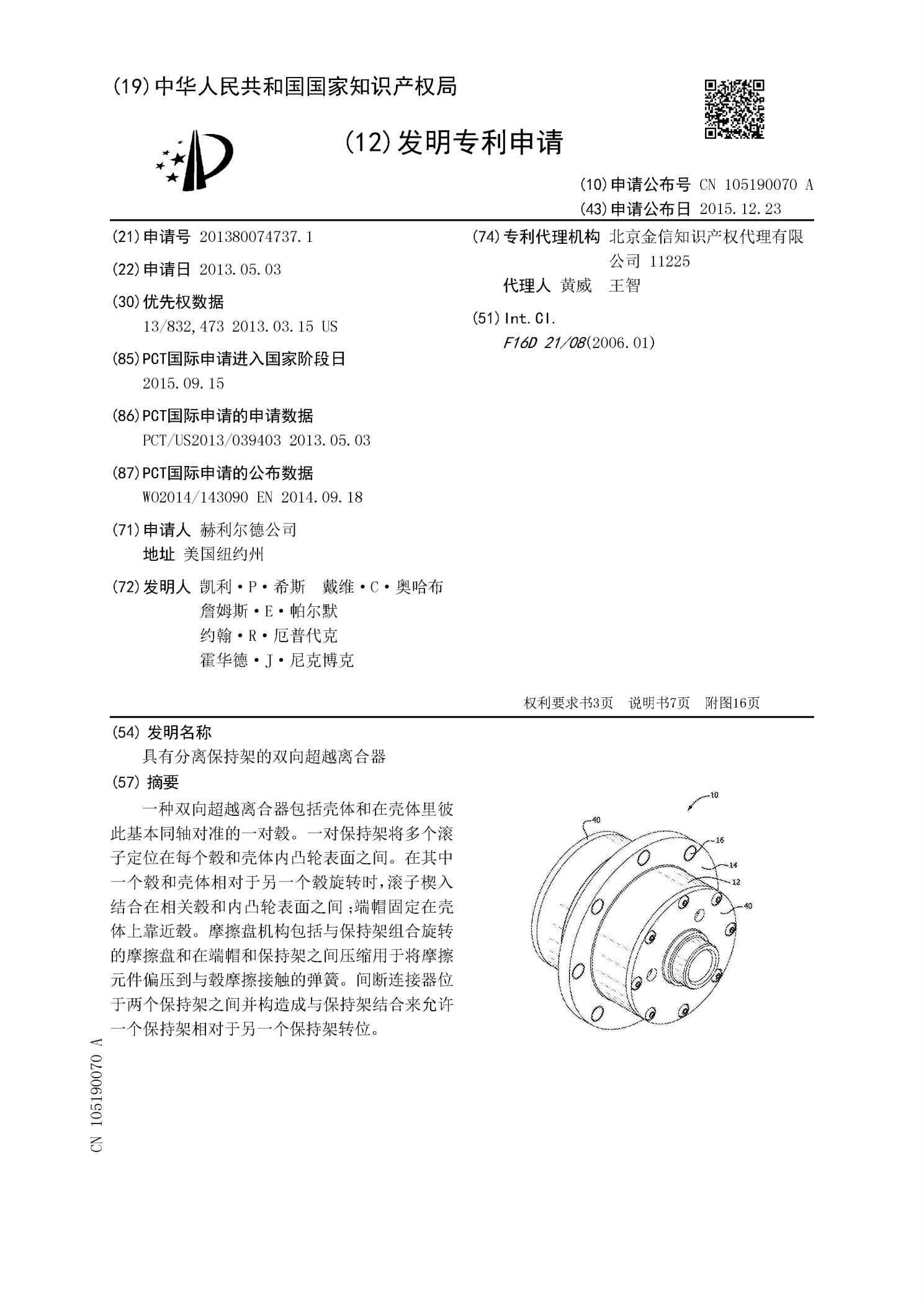
一种双向超越离合器包括壳体和在壳体里彼此基本同轴对准的一对毂。一对保持架将多个滚子定位在每个毂和壳体内凸轮表面之间。在其中一个毂和壳体相对于另一个毂旋转时,滚子楔入结合在相关毂和内凸轮表面之间;端帽固定在壳体上靠近毂。摩擦盘机构包括与保持架组合旋转的摩擦盘和在端帽和保持架之间压缩用于将摩擦元件偏压到与毂摩擦接触的弹簧。间断连接器位于两个保持架之间并构造成与保持架结合来允许一个保持架相对于另一个保持架转位。
一种双输入轴双向纠偏推杆.pdf
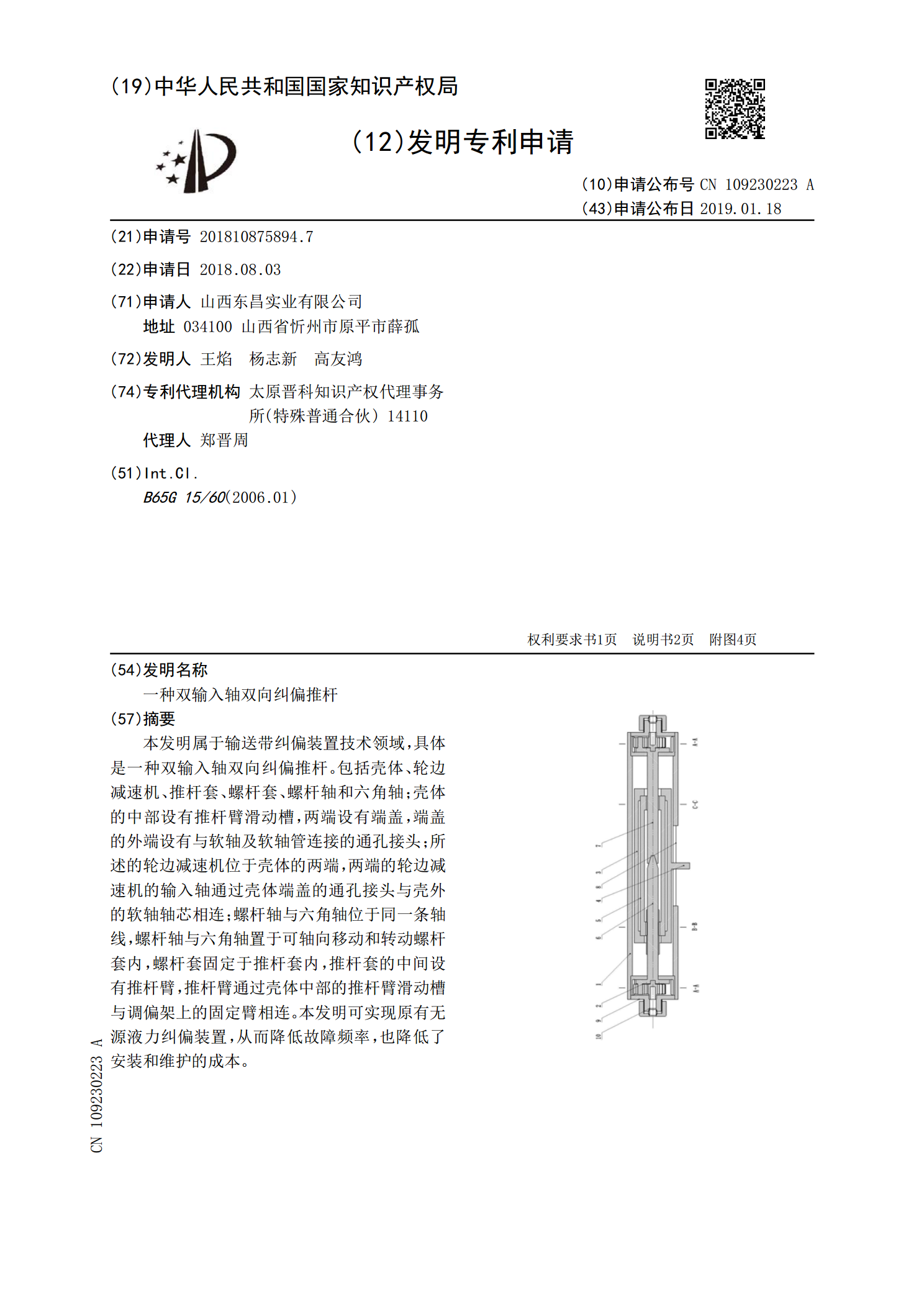
本发明属于输送带纠偏装置技术领域,具体是一种双输入轴双向纠偏推杆。包括壳体、轮边减速机、推杆套、螺杆套、螺杆轴和六角轴;壳体的中部设有推杆臂滑动槽,两端设有端盖,端盖的外端设有与软轴及软轴管连接的通孔接头;所述的轮边减速机位于壳体的两端,两端的轮边减速机的输入轴通过壳体端盖的通孔接头与壳外的软轴轴芯相连;螺杆轴与六角轴位于同一条轴线,螺杆轴与六角轴置于可轴向移动和转动螺杆套内,螺杆套固定于推杆套内,推杆套的中间设有推杆臂,推杆臂通过壳体中部的推杆臂滑动槽与调偏架上的固定臂相连。本发明可实现原有无源液力纠偏

磁力耦合器输入轴、输出轴支承机构.pdf
本发明涉及一种磁力耦合器输入轴、输出轴支承机构,设置在输入轴、输出轴上,包括支承输入轴的轴承,输入轴内端设有和输出轴内端连接的滚针轴承。本发明在输入轴的内端设滚针轴承,并使之作为输出轴的一个活动支点,输出轴的另一支点为固定端,装在蜗轮箱轴承座内,使输出轴的刚度、强度大大提高。