
抹平墙面的工程机械.pdf

Wi****m7

1/7
2/7
3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

抹平墙面的工程机械.pdf
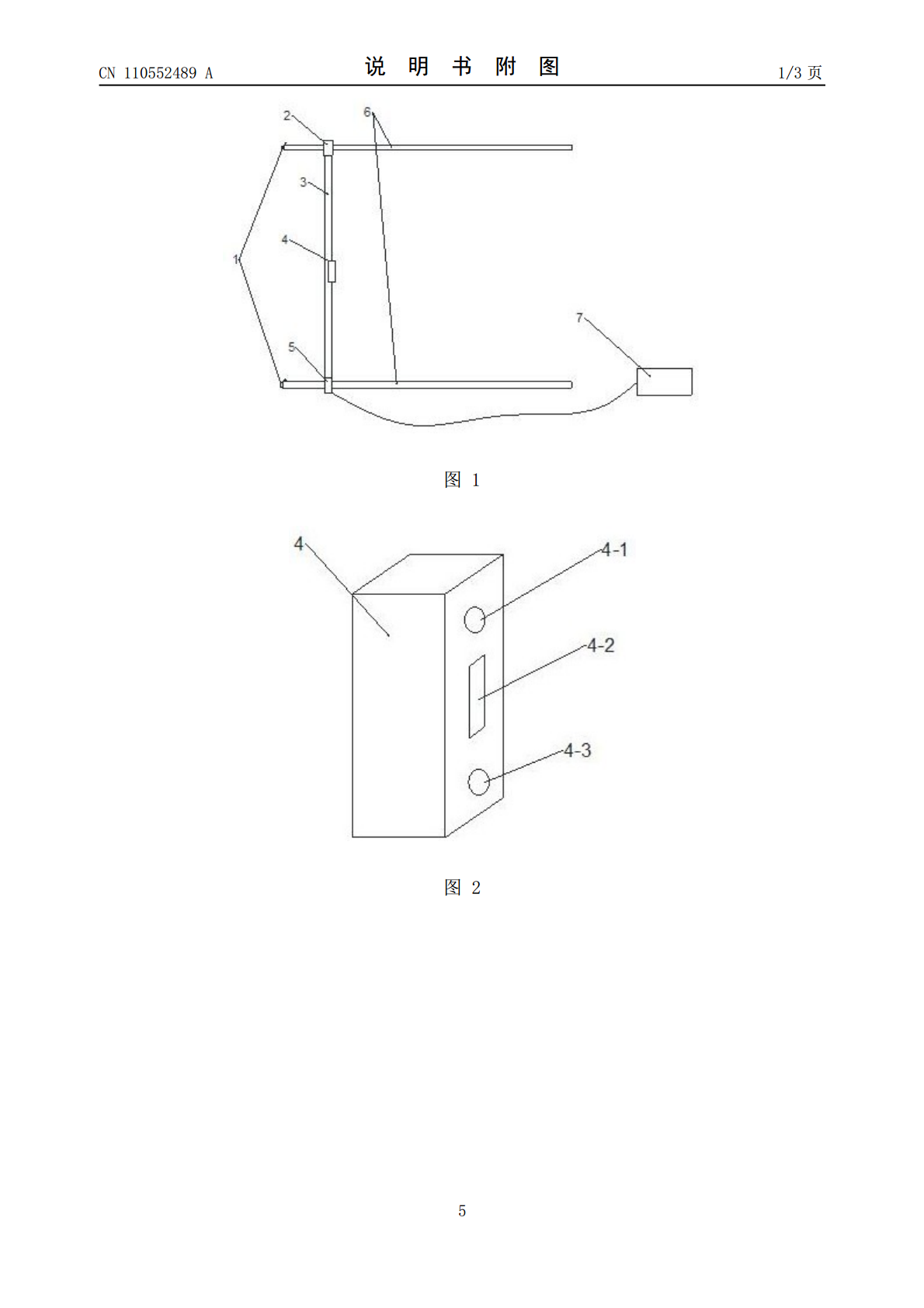
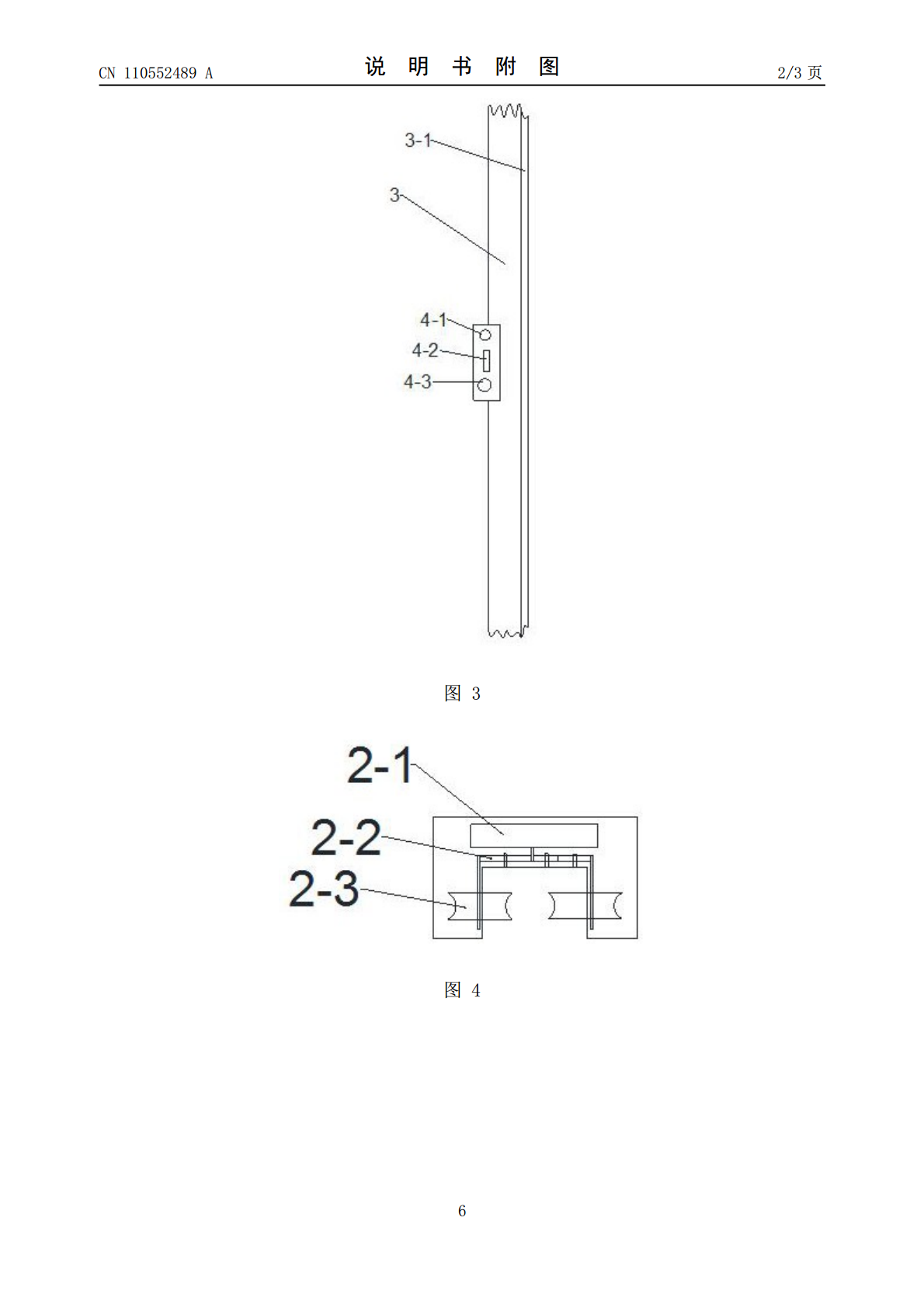
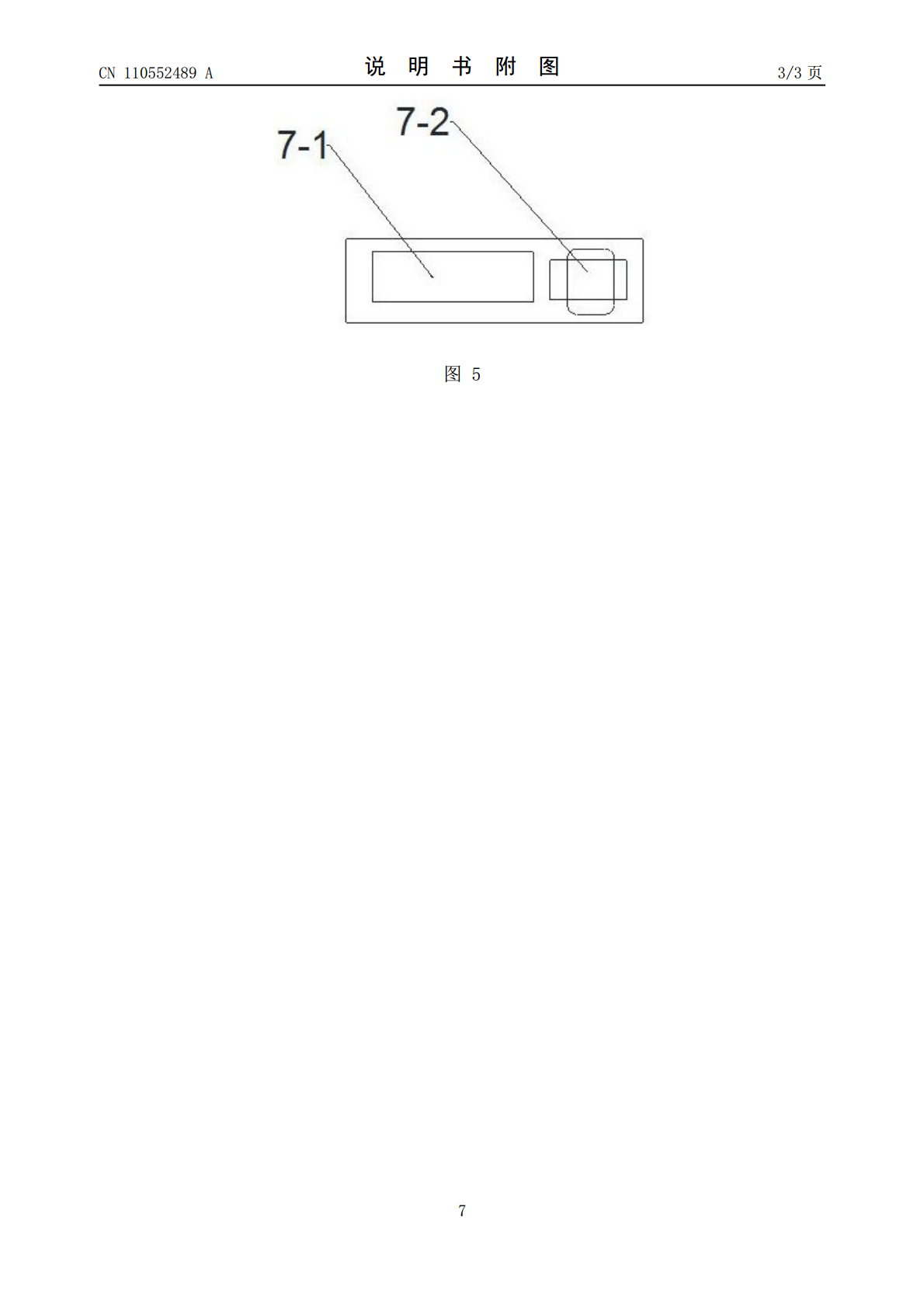
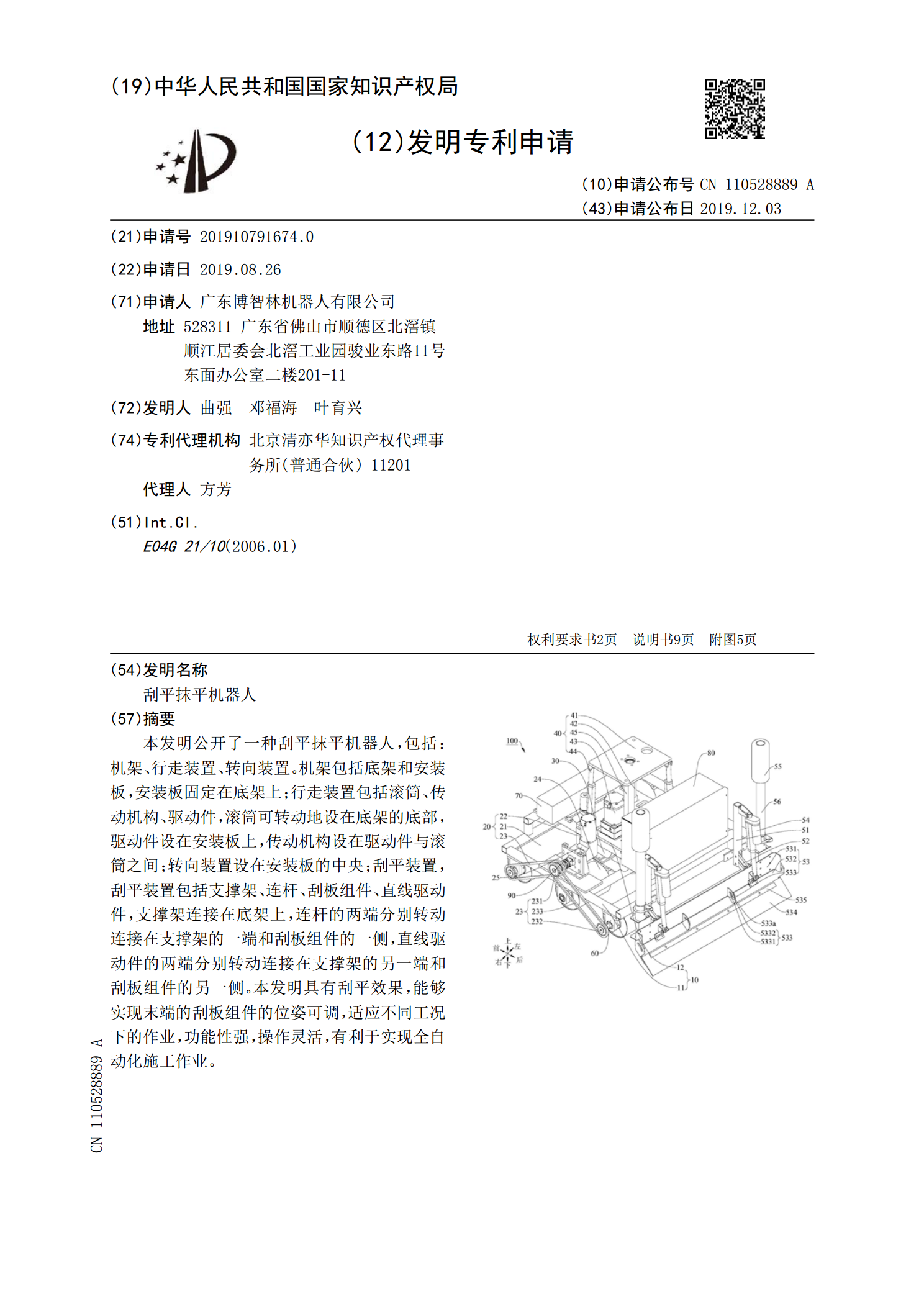
本发明是一种抹平墙面的工程机械,包括两个轨道固定头、上行走模块、电机、齿轮组、行走轮、抹平臂、抹平胶条、墙面测平器、白光摄像头、组合灯、红外摄像头、下行走模块、两个轨道、主机箱、控制器和配电器,所述的两个轨道固定头分别连接两个轨道的顶端,轨道固定器伸展以便固定轨道,所述的墙面测平器固定连接抹平臂中部,所述的上行走模块内部安装电机,电机通过齿轮组和行走轮连接,行走轮外侧表面为半圆形的凹槽,两个行走轮卡住轨道,所述的墙面测平器表面固定安装白光摄像头、组合灯和红外摄像头,可以提高施工效率,提升抹平效率减少施工时

砂浆抹平机及砂浆抹平方法.pdf
本发明涉及一种砂浆抹平机,包括:底盘,该底盘具有前安装部和后安装部,前安装部枢接有第一脚轮和第二脚轮,后安装部枢接有第三脚轮和第四脚轮;底盘设有第一电机;主机架,该主机架包括滑动底板、刀架主件、第二电机、滑动刀架、第三电机以及抹刀组件;抹刀组件包括抹刀座、第四电机以及抹刀;支撑架,该支撑架包括安装座、电动推杆以及撑杆,安装座连接在滑动底板上背离刀架主件的一端,撑杆背离电动推杆的一端与刀架主件背离滑动底板的一端连接。同时提供一种砂浆抹平方法,本发明的有益效果为:只需设置一把抹刀便可以完成抹平作业,工作效率高
刮平抹平机器人.pdf
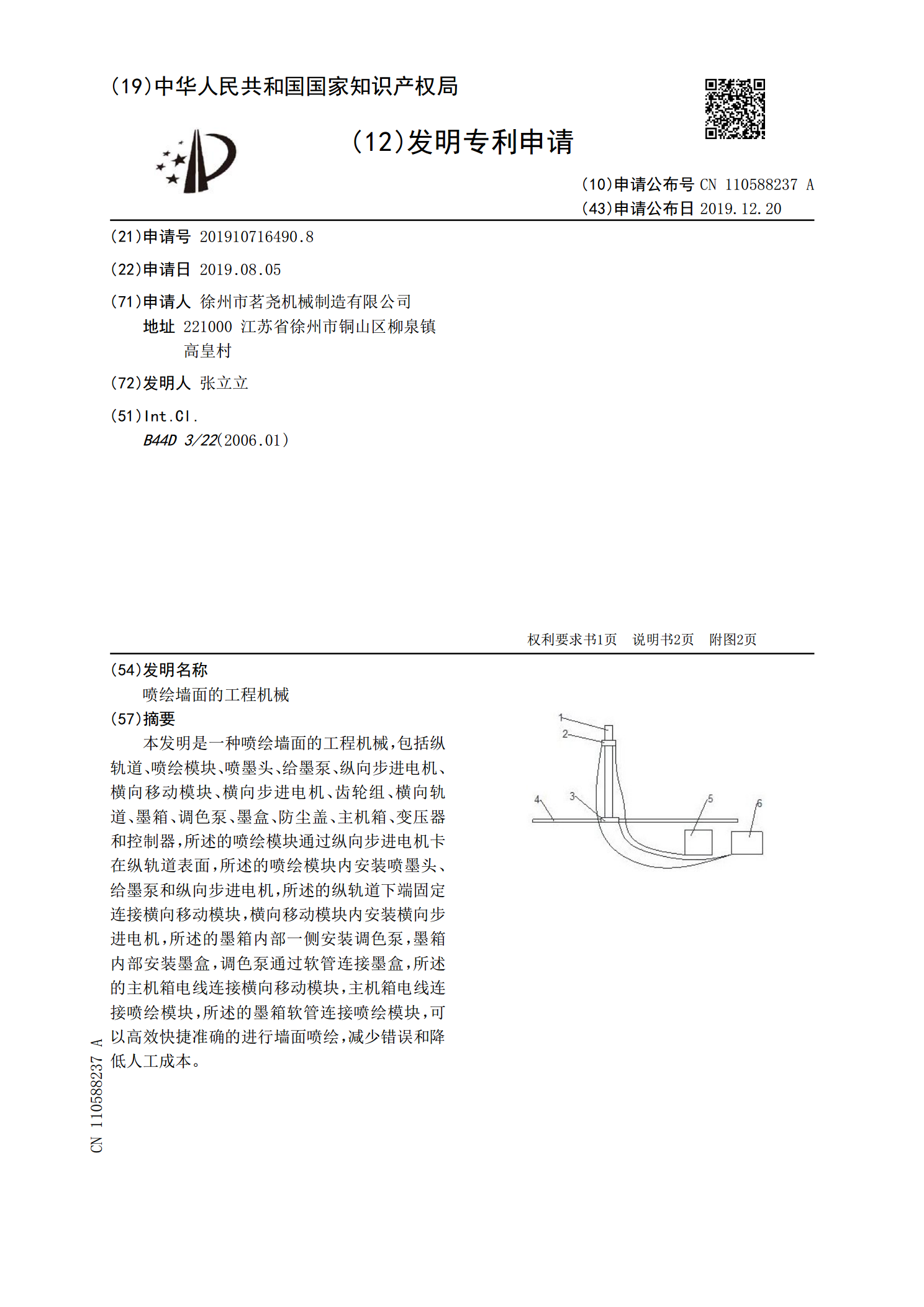
本发明公开了一种刮平抹平机器人,包括:机架、行走装置、转向装置。机架包括底架和安装板,安装板固定在底架上;行走装置包括滚筒、传动机构、驱动件,滚筒可转动地设在底架的底部,驱动件设在安装板上,传动机构设在驱动件与滚筒之间;转向装置设在安装板的中央;刮平装置,刮平装置包括支撑架、连杆、刮板组件、直线驱动件,支撑架连接在底架上,连杆的两端分别转动连接在支撑架的一端和刮板组件的一侧,直线驱动件的两端分别转动连接在支撑架的另一端和刮板组件的另一侧。本发明具有刮平效果,能够实现末端的刮板组件的位姿可调,适应不同工况下
喷绘墙面的工程机械.pdf
本发明是一种喷绘墙面的工程机械,包括纵轨道、喷绘模块、喷墨头、给墨泵、纵向步进电机、横向移动模块、横向步进电机、齿轮组、横向轨道、墨箱、调色泵、墨盒、防尘盖、主机箱、变压器和控制器,所述的喷绘模块通过纵向步进电机卡在纵轨道表面,所述的喷绘模块内安装喷墨头、给墨泵和纵向步进电机,所述的纵轨道下端固定连接横向移动模块,横向移动模块内安装横向步进电机,所述的墨箱内部一侧安装调色泵,墨箱内部安装墨盒,调色泵通过软管连接墨盒,所述的主机箱电线连接横向移动模块,主机箱电线连接喷绘模块,所述的墨箱软管连接喷绘模块,可以

喷涂墙面的工程机械.pdf
本发明是一种喷涂墙面的工程机械,为了实现上述目的,本发明通过以下技术方案实现:一种喷涂墙面的工程机械,包括轨道固定头、横向行走模块、电机、齿轮组、凹缘轮、竖轨道、喷头模块、喷头、竖轨道行走装置、横向轨道、主机箱、处理器、网络模块、变压器、涂料箱、涂料泵、输料管接口和涂料箱盖,所述的轨道固定头连接横向轨道顶端通过螺丝控制轨道固定头的长度从而适应不同宽度的墙面,所述的主机箱内部安装处理器,主机箱内部安装网络模块,主机箱内部安装变压器,整个设备通过变压器进行供电,所述的涂料箱内部安装涂料泵,本喷涂墙面的工程机械