
一种基于变步长曲率滤波的焊缝特征点求取方法.pdf

一吃****新冬


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于变步长曲率滤波的焊缝特征点求取方法.pdf
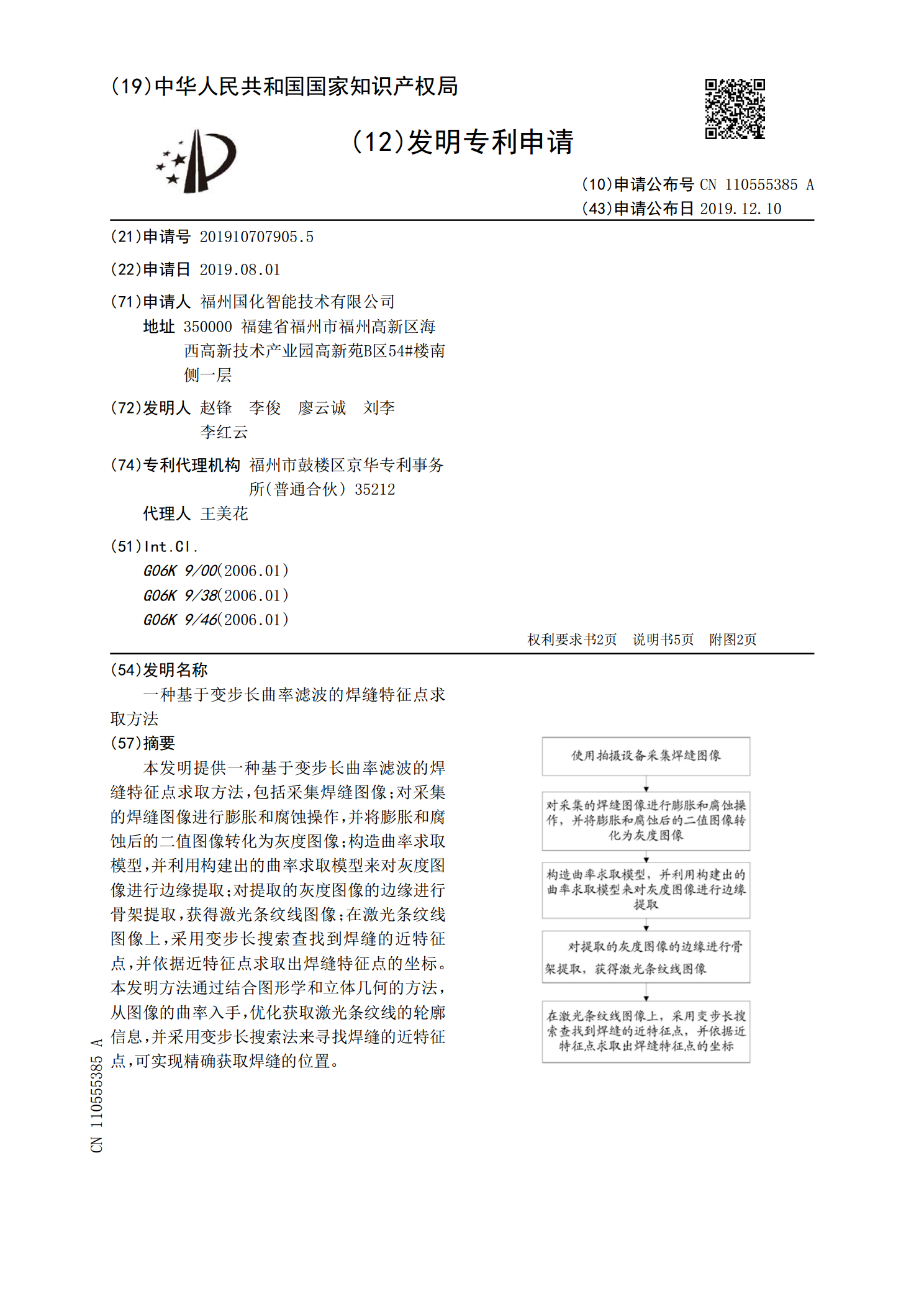
本发明提供一种基于变步长曲率滤波的焊缝特征点求取方法,包括采集焊缝图像;对采集的焊缝图像进行膨胀和腐蚀操作,并将膨胀和腐蚀后的二值图像转化为灰度图像;构造曲率求取模型,并利用构建出的曲率求取模型来对灰度图像进行边缘提取;对提取的灰度图像的边缘进行骨架提取,获得激光条纹线图像;在激光条纹线图像上,采用变步长搜索查找到焊缝的近特征点,并依据近特征点求取出焊缝特征点的坐标。本发明方法通过结合图形学和立体几何的方法,从图像的曲率入手,优化获取激光条纹线的轮廓信息,并采用变步长搜索法来寻找焊缝的近特征点,可实现精确

一种基于改进均值滤波法的焊缝图像特征点提取方法.pdf
本发明公开了一种基于改进均值滤波法的焊缝图像特征点提取方法,包括以下步骤:基于一种改进的均值滤波法,对原始焊缝图像的噪声进行抑制处理;基于二值化处理,进一步消除噪声对焊缝图像的干扰;基于中轴变换算法,在噪声抑制完成后提取图像的光带中心线;基于斜率法,最终在获得图像光带中心线的基础上提取获得焊缝图像的特征点。本发明方法通过两个步骤大大降低了噪声对焊缝图像的干扰,并能准确快速地提取出焊缝图像的特征点信息,对图像边缘细节部分保留多,使图像看起来会更清晰,可广泛运用于图像处理领域,具有良好的应用前景。

一种基于曲率滤波的表面重构方法.pdf
本发明公开了一种基于曲率滤波的表面重构方法,属于表面重构技术领域,特别涉及一种通过单张数字影像的表面重构方法。该方法首先固定合适的光源方向,通过数字图像采集设备拍摄被测表面;随后将二维数字影像通过Mongepatch方法嵌入到三维空间;定义了8个方向上的方向曲率,从而提出了一种线性近似的方向曲率计算方法;通过灰度信息的变化隐性的进行曲率的滤波;随后通过这种曲率的滤波对影致留形方法中的光滑约束项进行替代,从而提出了一种曲率滤波影致留形方法;在迭代终止条件的约束上采用全平均曲率进行限定,保留原始曲面信息。该
一种基于轮廓上曲率估计的图像特征点提取方法.pdf
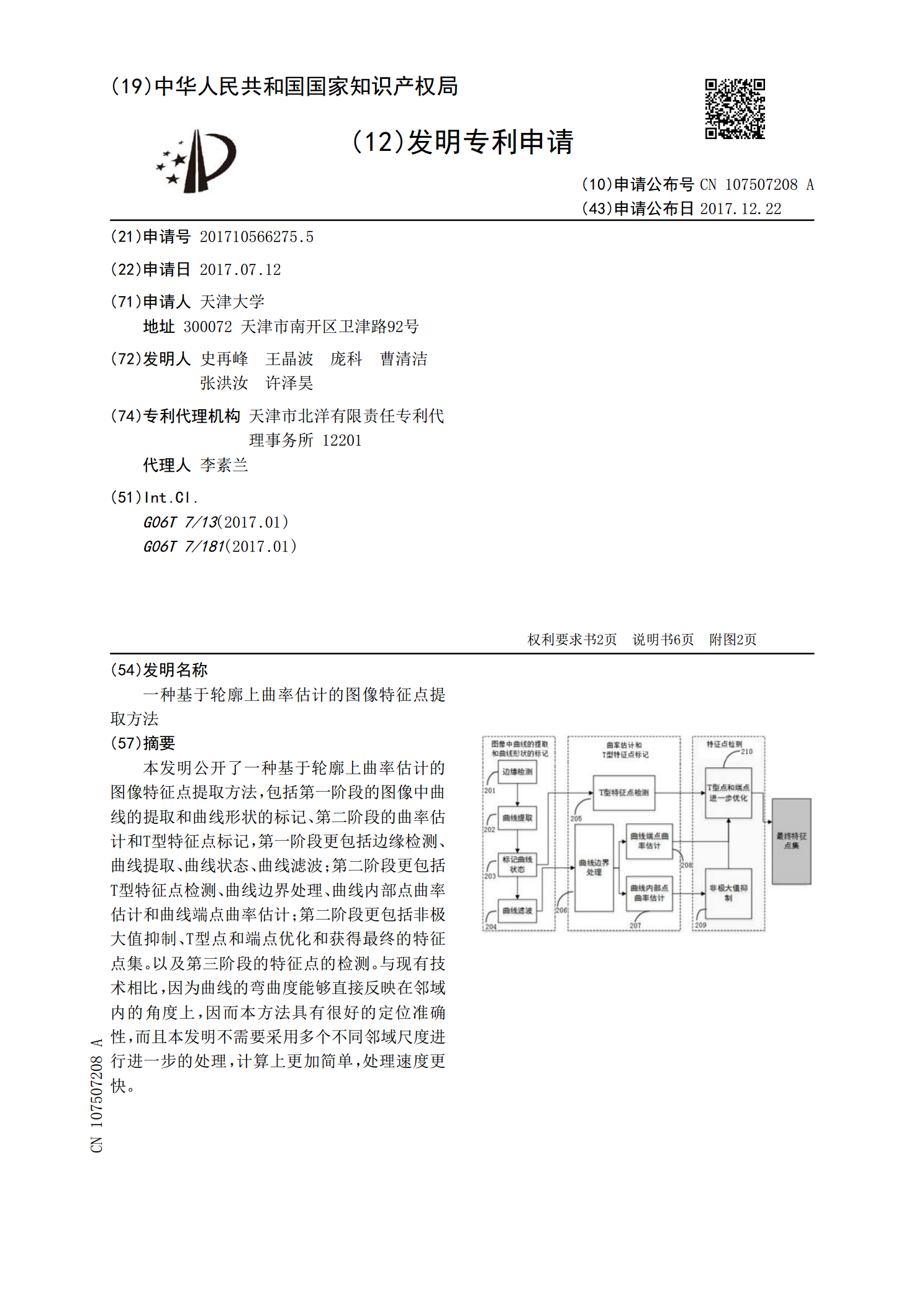
本发明公开了一种基于轮廓上曲率估计的图像特征点提取方法,包括第一阶段的图像中曲线的提取和曲线形状的标记、第二阶段的曲率估计和T型特征点标记,第一阶段更包括边缘检测、曲线提取、曲线状态、曲线滤波;第二阶段更包括T型特征点检测、曲线边界处理、曲线内部点曲率估计和曲线端点曲率估计;第二阶段更包括非极大值抑制、T型点和端点优化和获得最终的特征点集。以及第三阶段的特征点的检测。与现有技术相比,因为曲线的弯曲度能够直接反映在邻域内的角度上,因而本方法具有很好的定位准确性,而且本发明不需要采用多个不同邻域尺度进行进一步

基于新的变步长模型的LMS自适应滤波算法.docx
基于新的变步长模型的LMS自适应滤波算法基于新的变步长模型的LMS自适应滤波算法摘要:自适应滤波器是一种用于自适应信号处理的重要工具。LeastMeanSquare(LMS)算法是自适应滤波中最常见的算法之一。然而,传统的LMS算法对于信号的快速变化和非平稳性表现出一定的局限性。为了解决这个问题,我们引入了一种新的变步长模型,提出了基于这个模型的LMS自适应滤波算法。实验结果表明,这种算法在信号的快速变化和非平稳性方面具有较好的性能。引言:自适应滤波是一种利用递归算法根据外部输入自动调整滤波器权值,从而实