
一种步履式高度智能调节载具.pdf

努力****晓骞

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种步履式高度智能调节载具.pdf
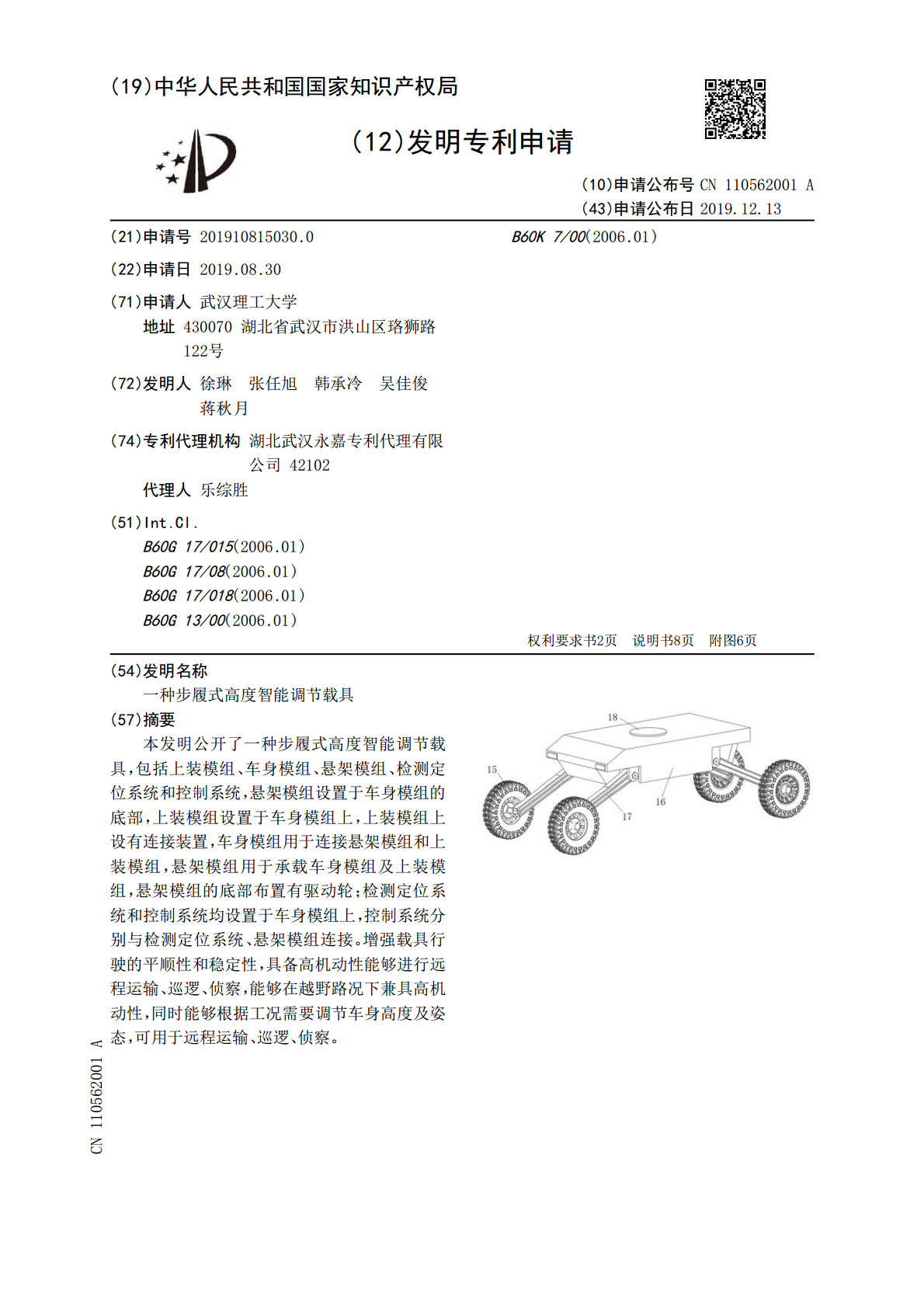
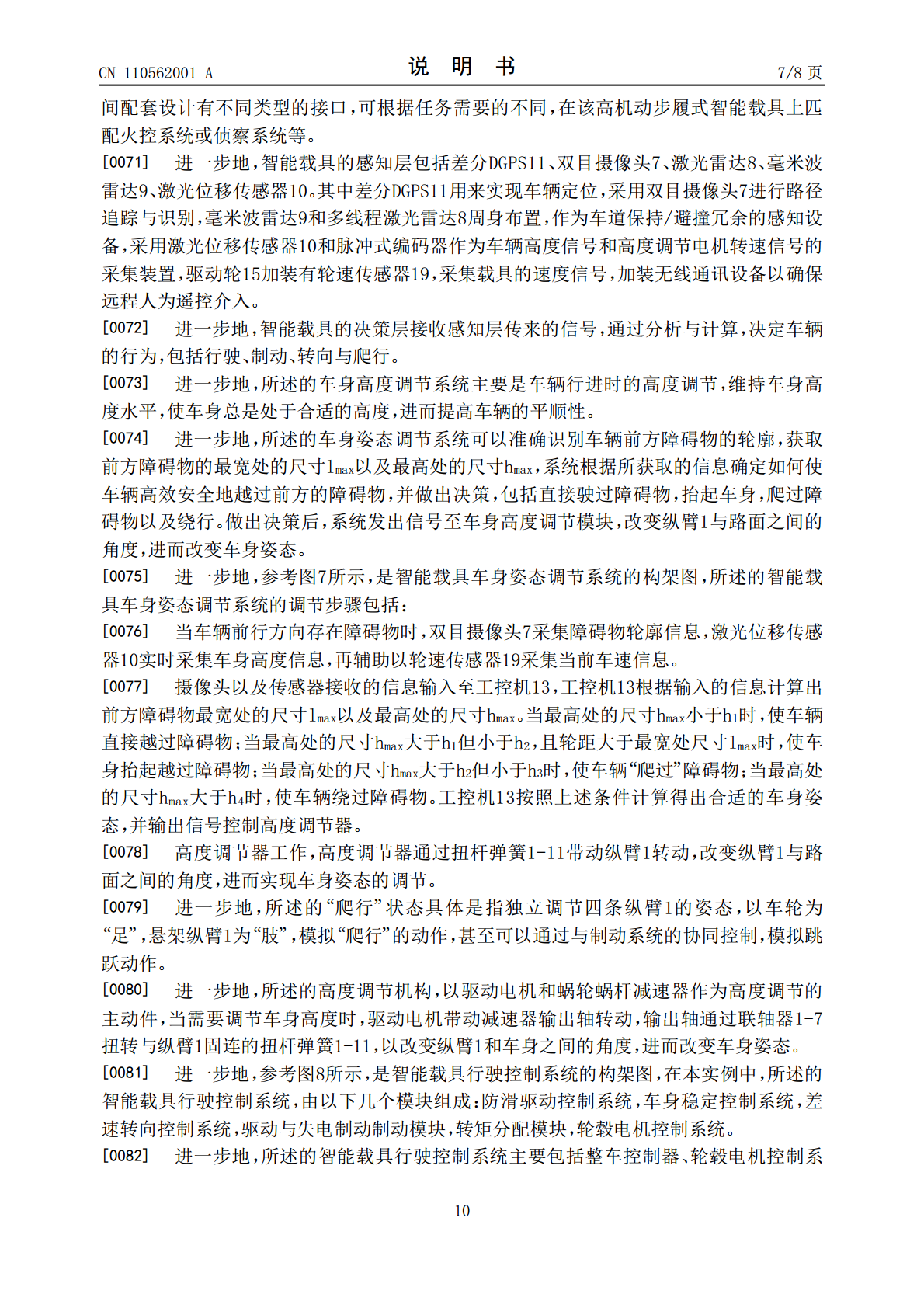
本发明公开了一种步履式高度智能调节载具,包括上装模组、车身模组、悬架模组、检测定位系统和控制系统,悬架模组设置于车身模组的底部,上装模组设置于车身模组上,上装模组上设有连接装置,车身模组用于连接悬架模组和上装模组,悬架模组用于承载车身模组及上装模组,悬架模组的底部布置有驱动轮;检测定位系统和控制系统均设置于车身模组上,控制系统分别与检测定位系统、悬架模组连接。增强载具行驶的平顺性和稳定性,具备高机动性能够进行远程运输、巡逻、侦察,能够在越野路况下兼具高机动性,同时能够根据工况需要调节车身高度及姿态,可用于
一种自调节载具机构.pdf
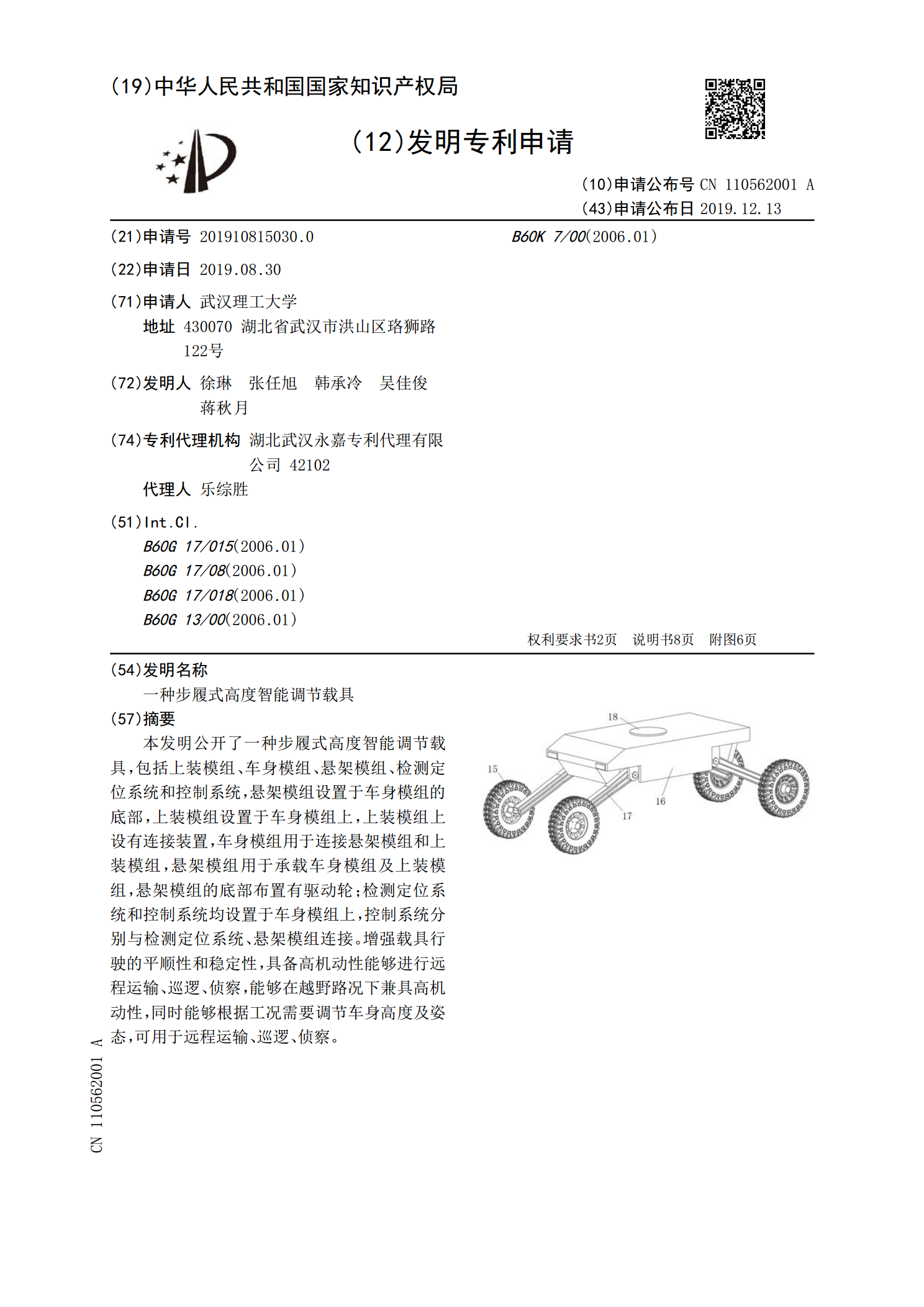
本发明公开一种自调节载具机构,包括位置调节组件、开夹闭夹组件、定位组件、电池托板、夹子。位置调节组件包括底座、回位滑板、限位块,回位滑板与限位块之间通过回位弹性件连接;开夹闭夹组件包括开闭夹滑块、开闭夹弹性件,开闭夹滑块移动安装于回位滑板上;电池托板固定于回位滑板上,夹子与电池托板活动连接,开闭夹滑块上开设有腰圆活动孔,开闭夹凸轮随动器通过复位弹性件与夹子弹性连接;定位组件包括定位驱动部、顶杆、推杆,顶杆上设有顶杆凸轮随动器,回位滑板上设有定位块,定位块开设有定位槽,推杆与开闭夹滑块抵接或分离。本发明的自
一种智能电动高度调节式园艺观赏花架.pdf
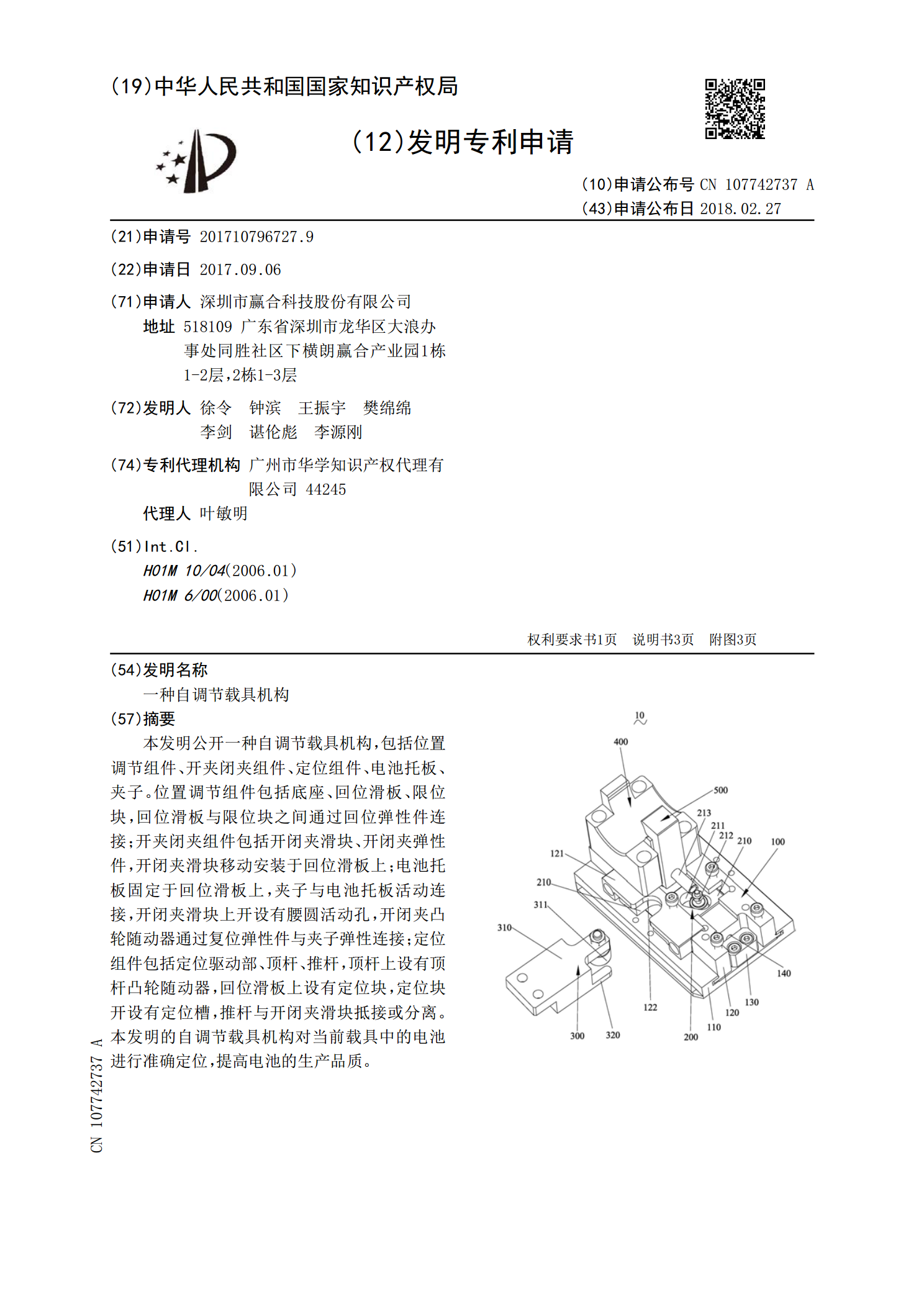
本发明公开了一种智能电动高度调节式园艺观赏花架,包括底板,所述底板的上表面的中间位置与套管的下端固定连接,套管的内壁和移动管的外侧面滑动连接,第二减速电机带动螺杆旋转,螺杆和固定板的螺孔螺纹连接,固定板带动移动管上下移动,移动管带动放置板上下移动,实现观赏植物高度的调节,滑槽与限位条滑动连接,限制移动管转动,使得移动管只能在放置板的作用下上下移动,第一减速电机带动放置板旋转,放置板带动观赏植物旋转,便于人们观赏,有刹车片的万向轮使得本电动高度调节式园艺观赏花架便于移动,提高移动本电动高度调节式园艺观赏花架
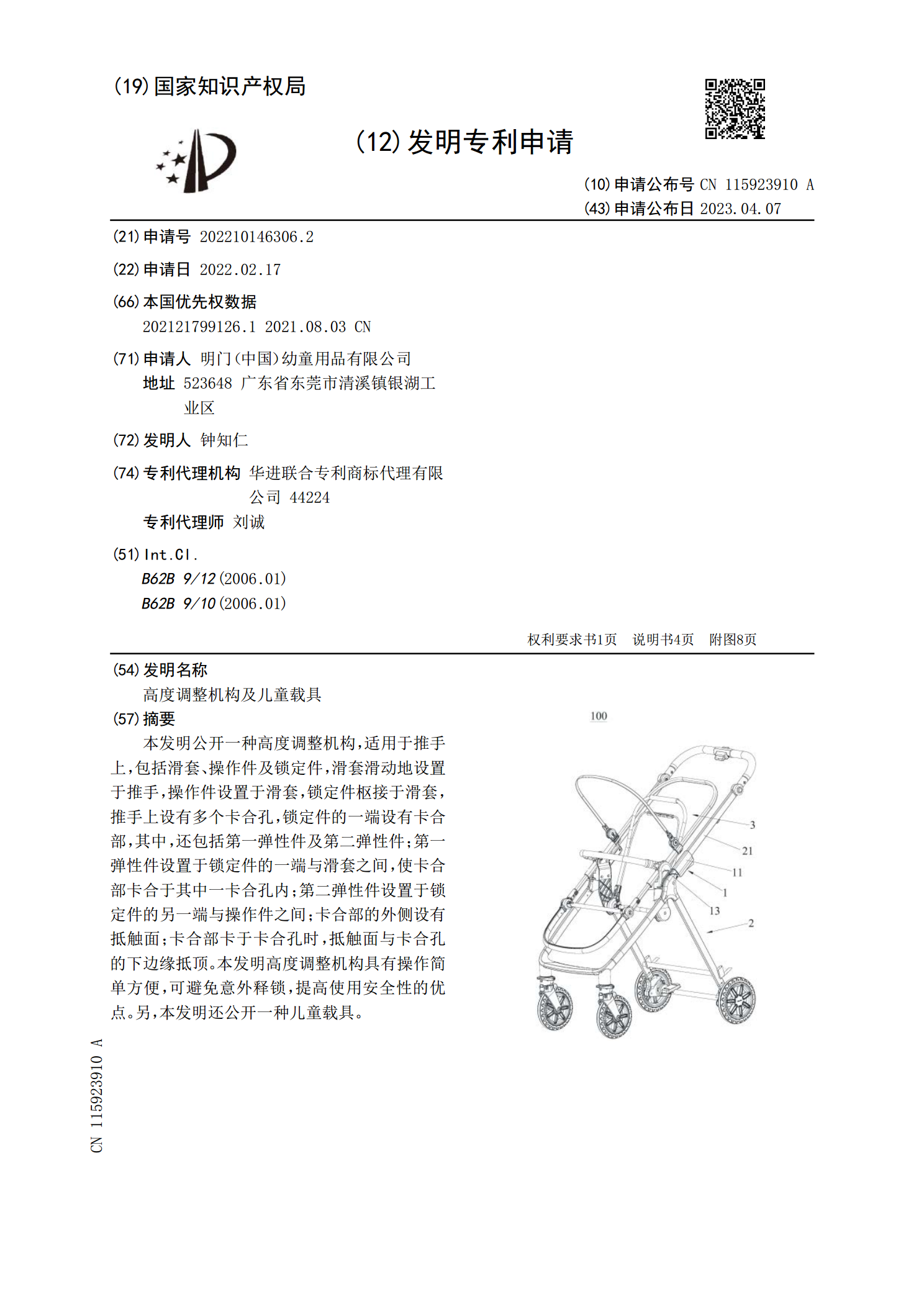
高度调整机构及儿童载具.pdf
本发明公开一种高度调整机构,适用于推手上,包括滑套、操作件及锁定件,滑套滑动地设置于推手,操作件设置于滑套,锁定件枢接于滑套,推手上设有多个卡合孔,锁定件的一端设有卡合部,其中,还包括第一弹性件及第二弹性件;第一弹性件设置于锁定件的一端与滑套之间,使卡合部卡合于其中一卡合孔内;第二弹性件设置于锁定件的另一端与操作件之间;卡合部的外侧设有抵触面;卡合部卡于卡合孔时,抵触面与卡合孔的下边缘抵顶。本发明高度调整机构具有操作简单方便,可避免意外释锁,提高使用安全性的优点。另,本发明还公开一种儿童载具。
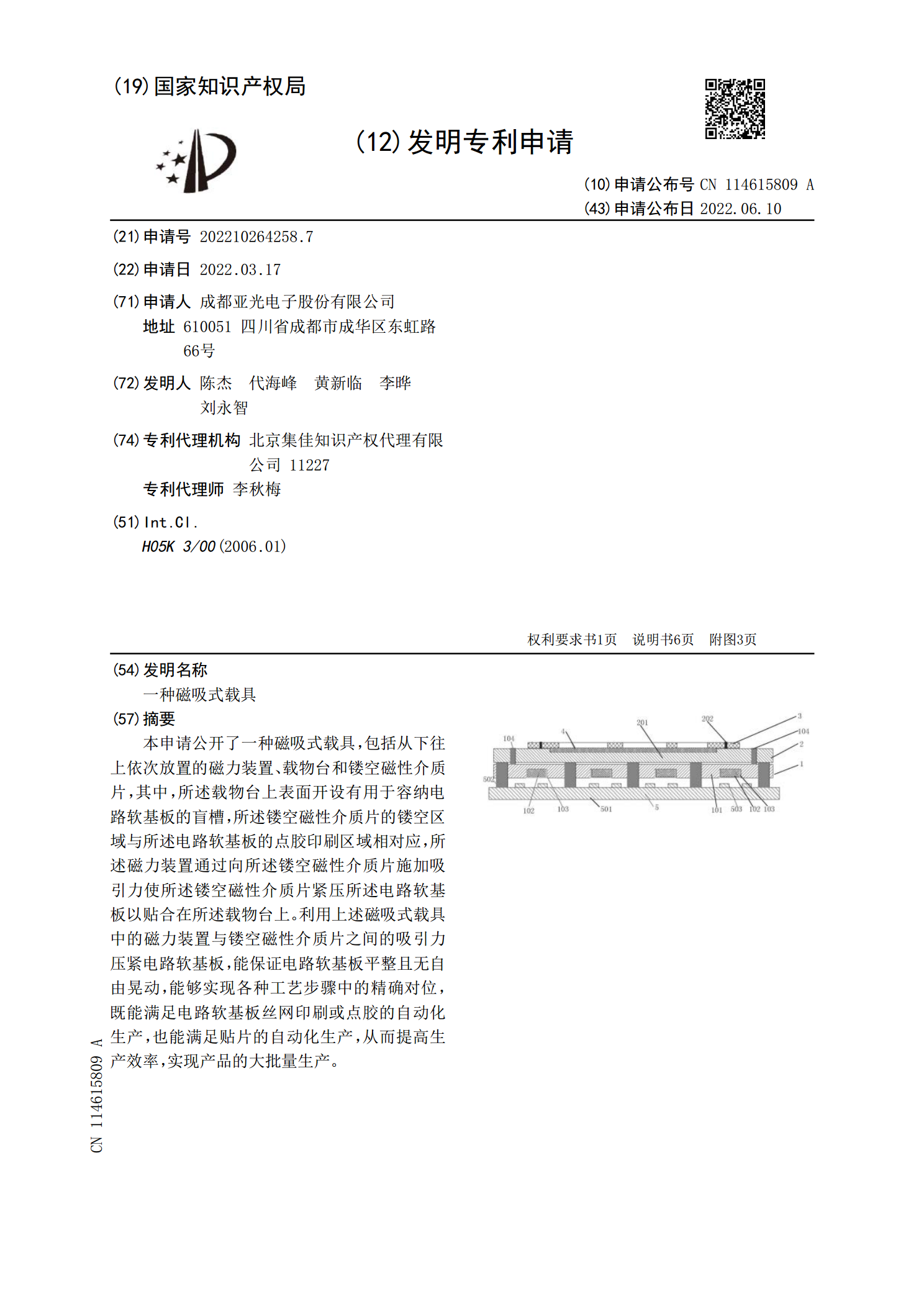
一种磁吸式载具.pdf
本申请公开了一种磁吸式载具,包括从下往上依次放置的磁力装置、载物台和镂空磁性介质片,其中,所述载物台上表面开设有用于容纳电路软基板的盲槽,所述镂空磁性介质片的镂空区域与所述电路软基板的点胶印刷区域相对应,所述磁力装置通过向所述镂空磁性介质片施加吸引力使所述镂空磁性介质片紧压所述电路软基板以贴合在所述载物台上。利用上述磁吸式载具中的磁力装置与镂空磁性介质片之间的吸引力压紧电路软基板,能保证电路软基板平整且无自由晃动,能够实现各种工艺步骤中的精确对位,既能满足电路软基板丝网印刷或点胶的自动化生产,也能满足贴片