
一种全自动悬臂磨床.pdf

如灵****姐姐

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全自动悬臂磨床.pdf
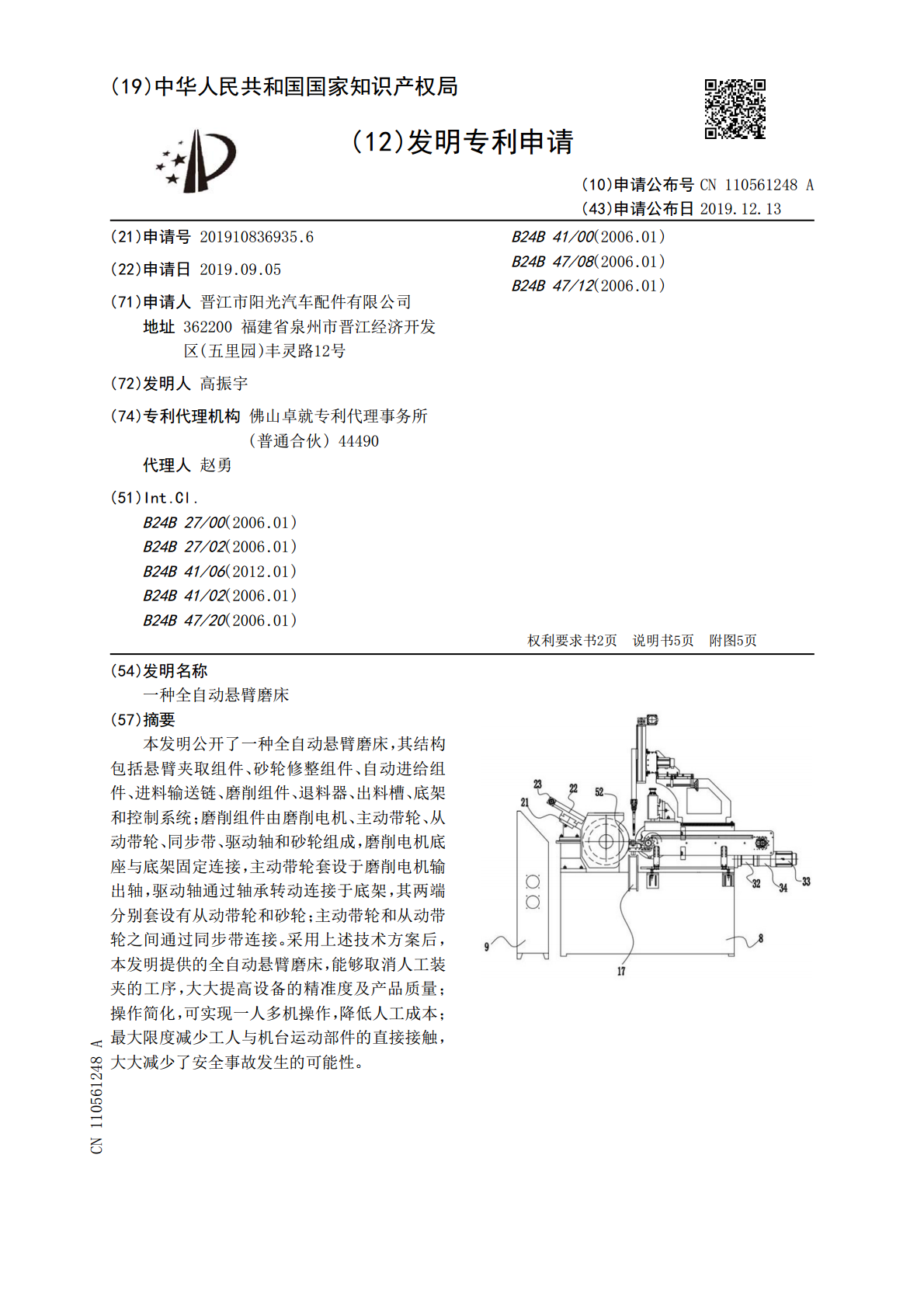
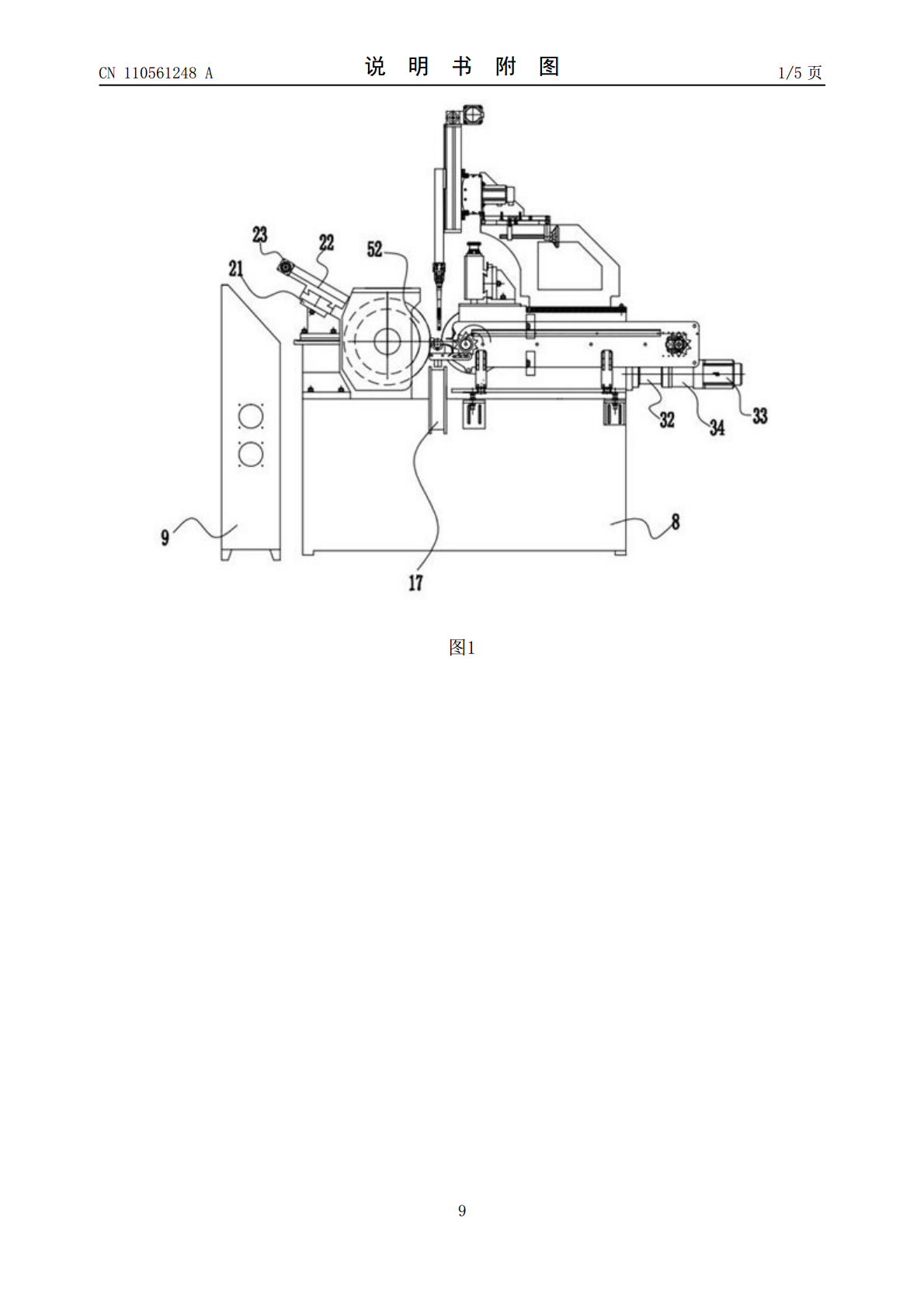
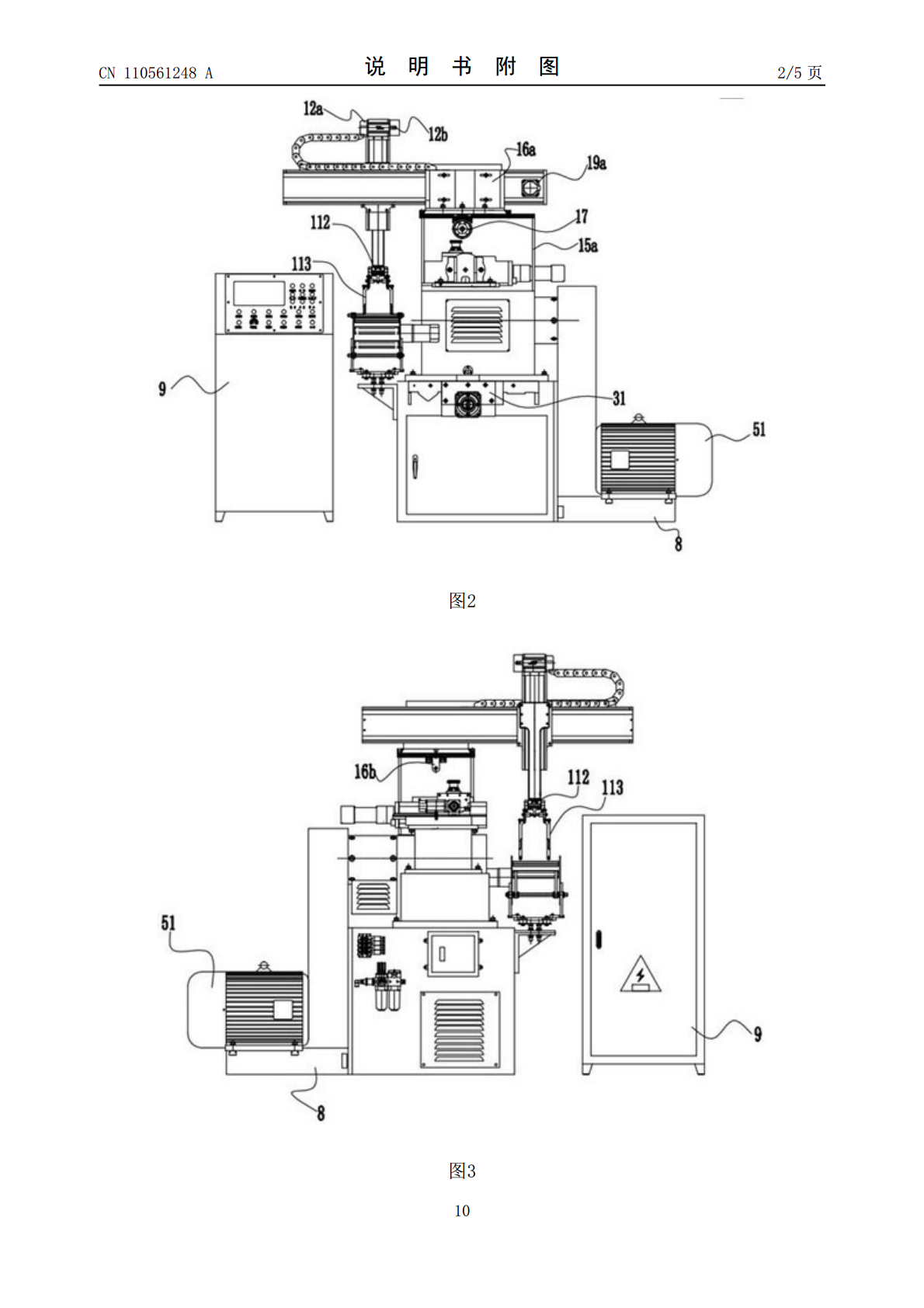
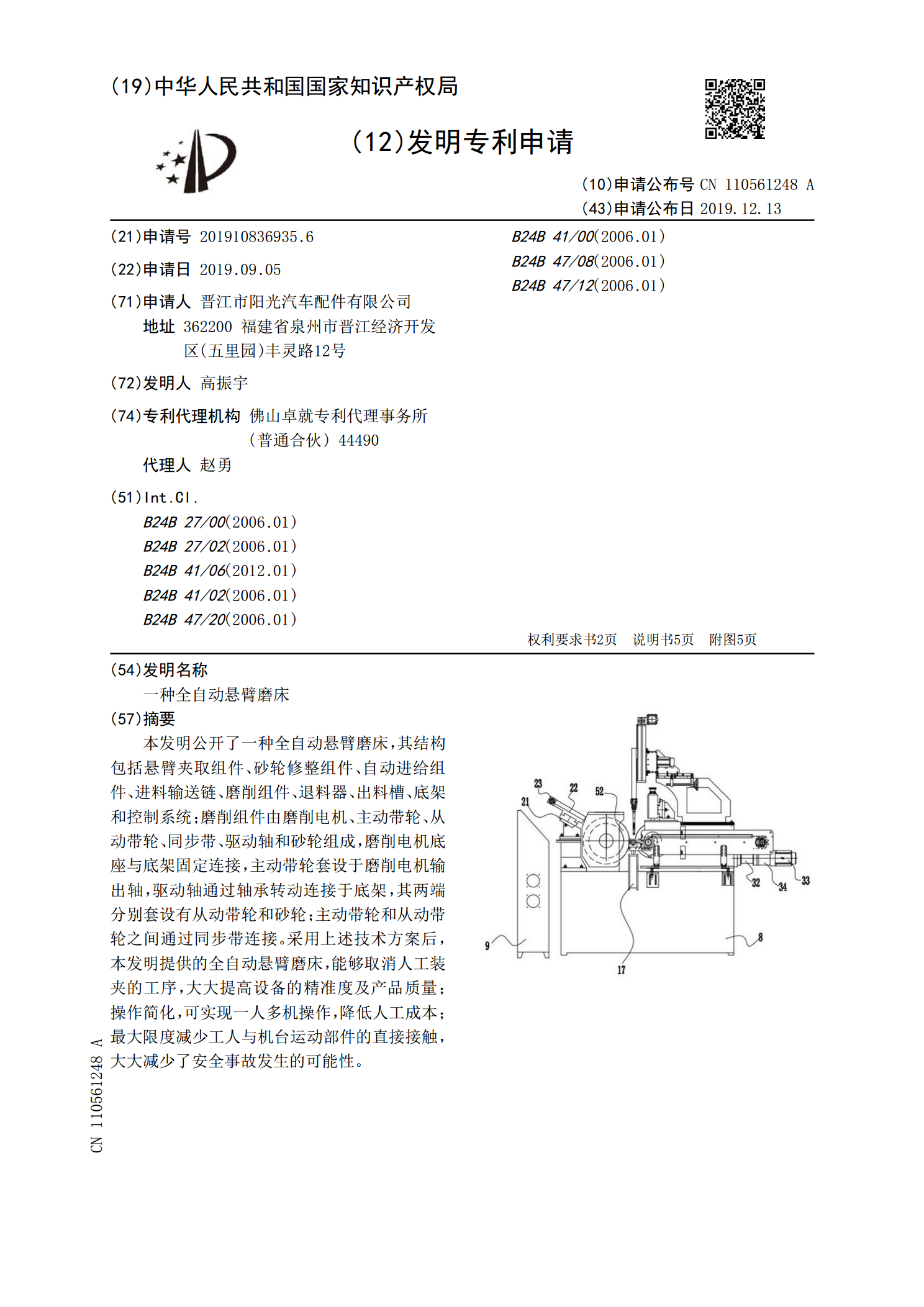
本发明公开了一种全自动悬臂磨床,其结构包括悬臂夹取组件、砂轮修整组件、自动进给组件、进料输送链、磨削组件、退料器、出料槽、底架和控制系统;磨削组件由磨削电机、主动带轮、从动带轮、同步带、驱动轴和砂轮组成,磨削电机底座与底架固定连接,主动带轮套设于磨削电机输出轴,驱动轴通过轴承转动连接于底架,其两端分别套设有从动带轮和砂轮;主动带轮和从动带轮之间通过同步带连接。采用上述技术方案后,本发明提供的全自动悬臂磨床,能够取消人工装夹的工序,大大提高设备的精准度及产品质量;操作简化,可实现一人多机操作,降低人工成本;
一种全自动磨床.pdf
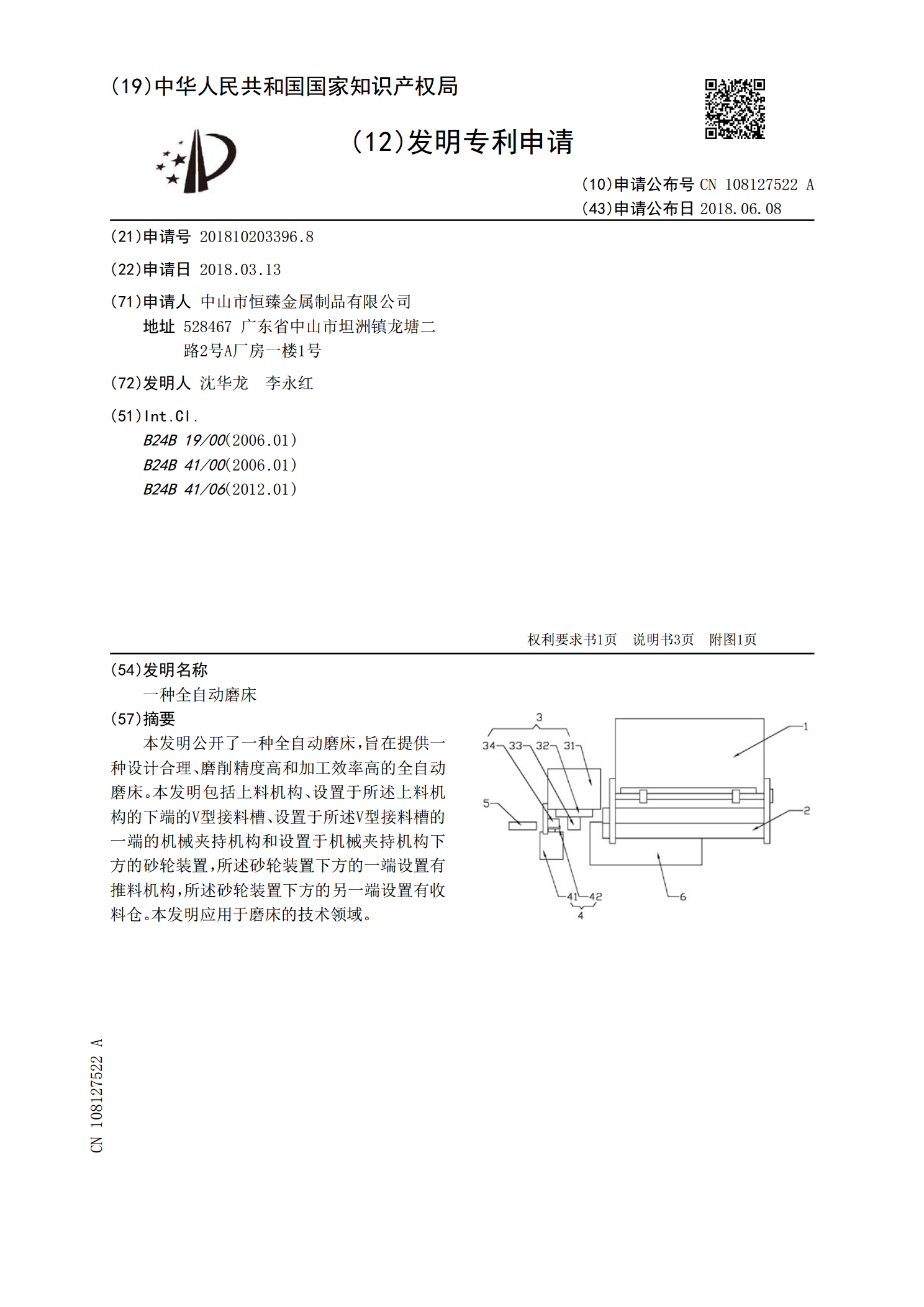
本发明公开了一种全自动磨床,旨在提供一种设计合理、磨削精度高和加工效率高的全自动磨床。本发明包括上料机构、设置于所述上料机构的下端的V型接料槽、设置于所述V型接料槽的一端的机械夹持机构和设置于机械夹持机构下方的砂轮装置,所述砂轮装置下方的一端设置有推料机构,所述砂轮装置下方的另一端设置有收料仓。本发明应用于磨床的技术领域。
一种全自动段差磨床.pdf
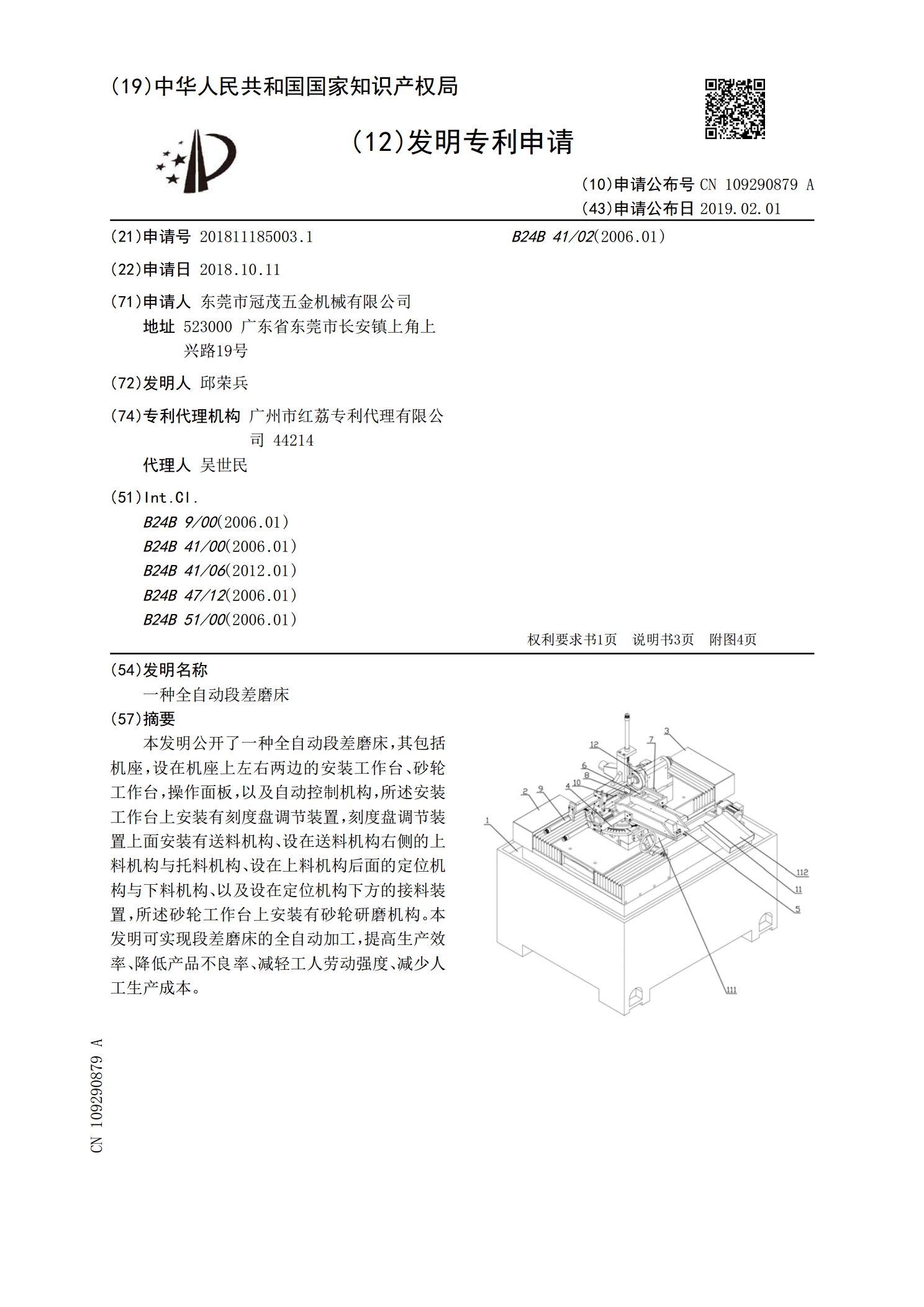
本发明公开了一种全自动段差磨床,其包括机座,设在机座上左右两边的安装工作台、砂轮工作台,操作面板,以及自动控制机构,所述安装工作台上安装有刻度盘调节装置,刻度盘调节装置上面安装有送料机构、设在送料机构右侧的上料机构与托料机构、设在上料机构后面的定位机构与下料机构、以及设在定位机构下方的接料装置,所述砂轮工作台上安装有砂轮研磨机构。本发明可实现段差磨床的全自动加工,提高生产效率、降低产品不良率、减轻工人劳动强度、减少人工生产成本。

一种全自动数控沟槽磨床.pdf
本发明属于金属切削技术领域,特指一种全自动数控沟槽磨床,包括床座,在床座上设置有进给工作台以及进给驱动电机,工作台上安装有分度装置、工装夹具、分度伺服电机和落料装置,床座上还设置有定位装配机构、自动送料机构和磨头系统,磨头系统的升降架上设置有磨头主轴和驱动磨头主轴的变频电机,磨头主轴上的砂轮磨削安置在定位装配机构上的待加工工件,本发明的定位装配机构可将轧制钻准确的按预设方位固定在磨床上,并通过磨头系统对轧制钻进行磨削精加工,其成型出的钻头节省材料,具有较高的加工效率高,且光洁度良好,精度较高,成本低,磨削

全自动磨床.pdf
本发明涉及一种全自动磨床,包括机座、工作台、头架、尾座、砂轮机构、上下料机械手、自动上料机构、自动下料机构以及数控装置,头架与尾座的相向面上分别设有卡盘和顶尖,卡盘与顶尖同轴心设置。上下料机械手包括取料气爪、取料缸、放料气爪、放料缸、导滑固定架、滚珠丝杠、直线导轨和导轨架,取料气爪、取料缸、放料气爪、放料缸均安装在导滑固定架上,且取料气爪与放料气爪前后呈夹角设置、左右呈平行设置,导滑固定架与滚珠丝杠和直线导轨滑动配合。该磨床自动化程度高,工件的上下料、装夹、加工、在线测量等全过程均由数控装置自动完成,可实