
一种基于RFID定位技术的定位误差补偿方法和系统.pdf

美丽****ka

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于RFID定位技术的定位误差补偿方法和系统.pdf
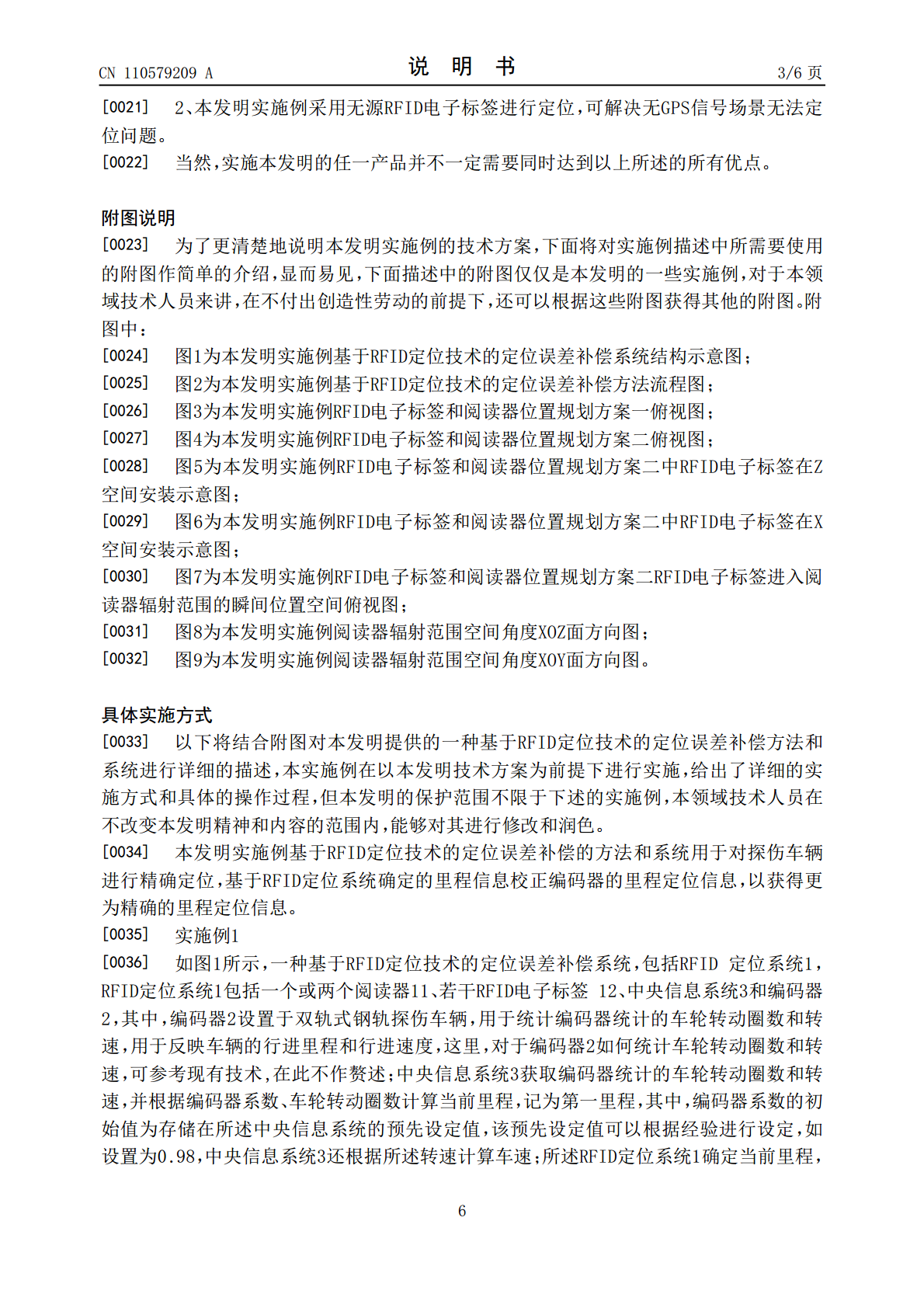
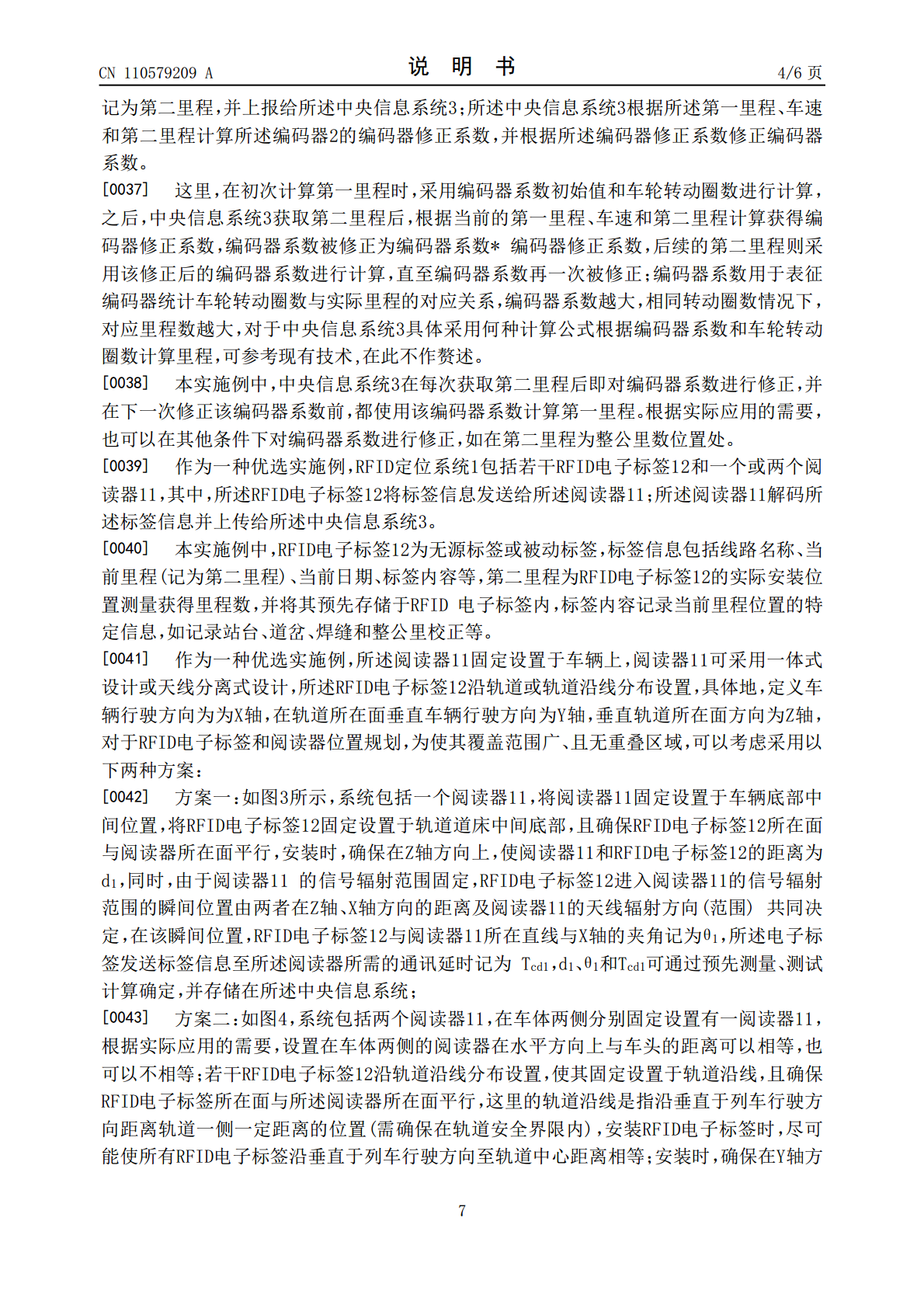
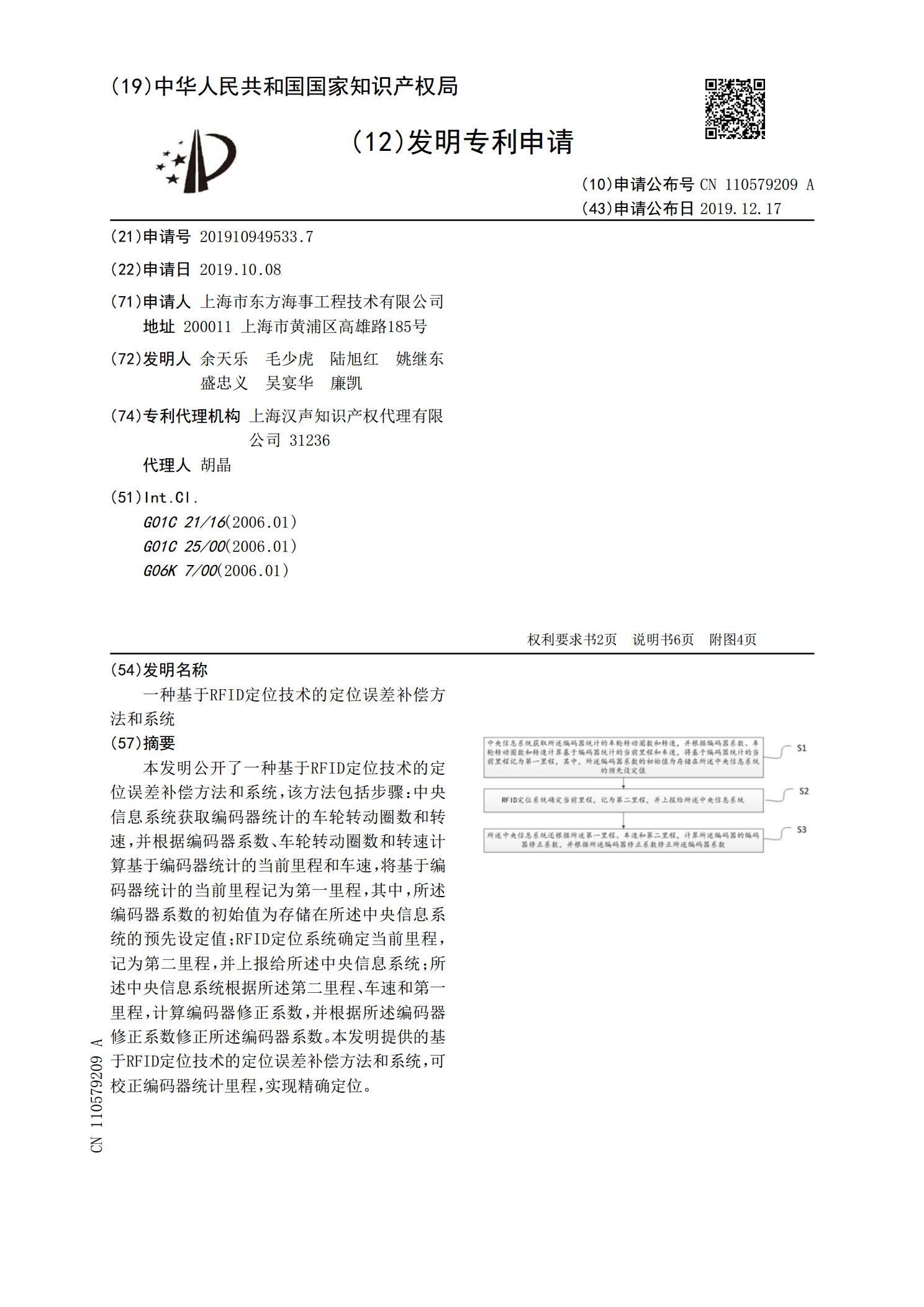
本发明公开了一种基于RFID定位技术的定位误差补偿方法和系统,该方法包括步骤:中央信息系统获取编码器统计的车轮转动圈数和转速,并根据编码器系数、车轮转动圈数和转速计算基于编码器统计的当前里程和车速,将基于编码器统计的当前里程记为第一里程,其中,所述编码器系数的初始值为存储在所述中央信息系统的预先设定值;RFID定位系统确定当前里程,记为第二里程,并上报给所述中央信息系统;所述中央信息系统根据所述第二里程、车速和第一里程,计算编码器修正系数,并根据所述编码器修正系数修正所述编码器系数。本发明提供的基于RFI
RFID收发器、基于RFID的视频定位系统和定位方法.pdf
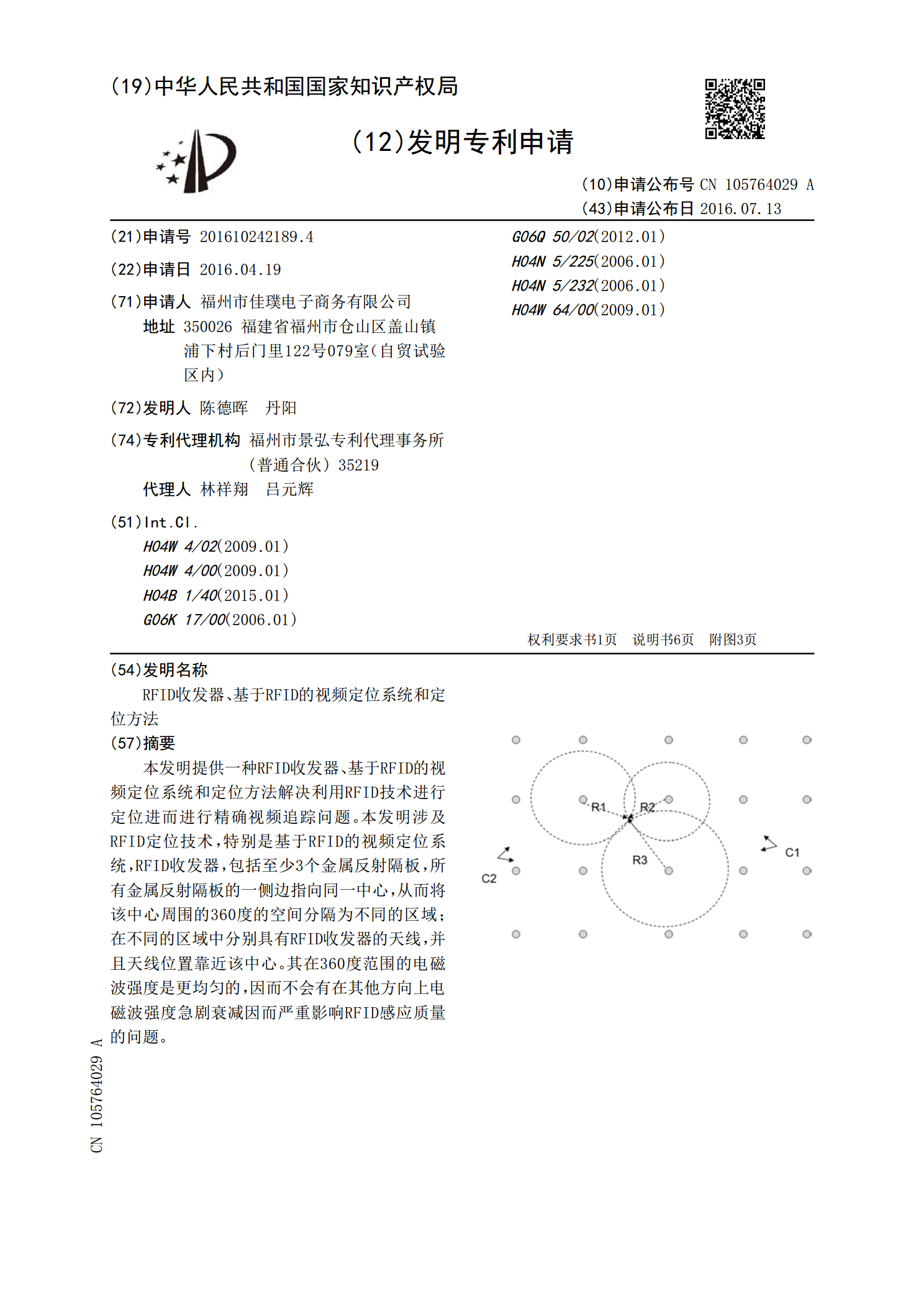
本发明提供一种RFID收发器、基于RFID的视频定位系统和定位方法解决利用RFID技术进行定位进而进行精确视频追踪问题。本发明涉及RFID定位技术,特别是基于RFID的视频定位系统,RFID收发器,包括至少3个金属反射隔板,所有金属反射隔板的一侧边指向同一中心,从而将该中心周围的360度的空间分隔为不同的区域;在不同的区域中分别具有RFID收发器的天线,并且天线位置靠近该中心。其在360度范围的电磁波强度是更均匀的,因而不会有在其他方向上电磁波强度急剧衰减因而严重影响RFID感应质量的问题。
一种基于RFID的景区定位装置及定位系统.pdf
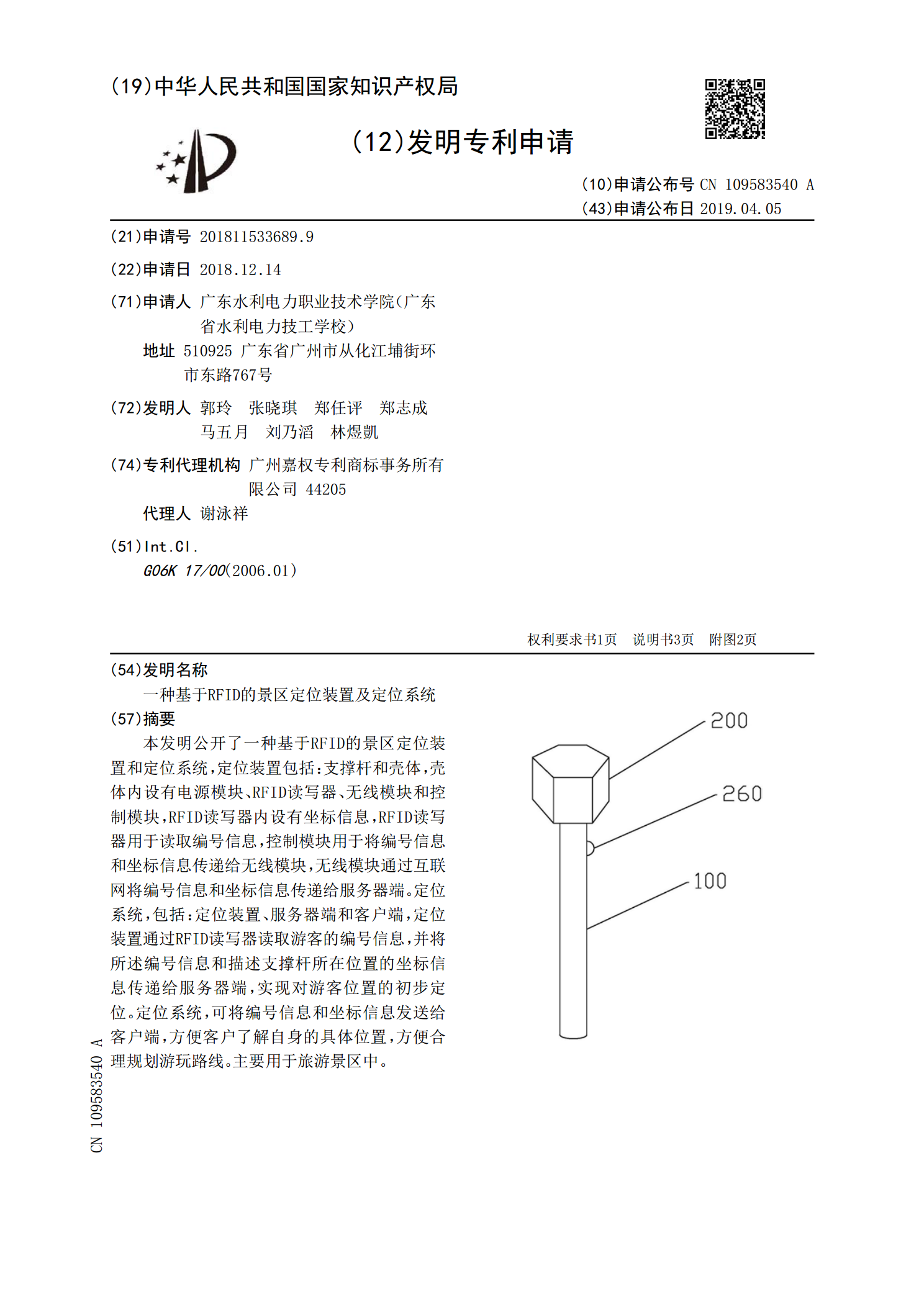
本发明公开了一种基于RFID的景区定位装置和定位系统,定位装置包括:支撑杆和壳体,壳体内设有电源模块、RFID读写器、无线模块和控制模块,RFID读写器内设有坐标信息,RFID读写器用于读取编号信息,控制模块用于将编号信息和坐标信息传递给无线模块,无线模块通过互联网将编号信息和坐标信息传递给服务器端。定位系统,包括:定位装置、服务器端和客户端,定位装置通过RFID读写器读取游客的编号信息,并将所述编号信息和描述支撑杆所在位置的坐标信息传递给服务器端,实现对游客位置的初步定位。定位系统,可将编号信息和坐标信

一种定位与误差补偿方法.pdf
一种定位与误差补偿方法,根据待测空间分布式相机的构型定制专用支撑架,在支撑架上相应位置安装若干面平面反射镜,用干涉仪精确调整各平面反射镜法线之间的夹角,使之在0.5″之内,然后将支撑架整体置于支撑平台上组成高精度定位与误差补偿装置,最后调整支撑架与支撑平台至测试状态,利用精密测角仪完成对平行光管的高精度定位与误差补偿。使用该测试装置可使遥感相机视轴夹角测试及CCD线阵平行性测试中,平行光管的定位精度达到1″,并在三线阵相机集成测试中得到应用,且经过在轨检验。
基于RFID的定位系统.docx
基于RFID的定位系统的设计与实现一、课题背景及意义随着无线技术、移动计算器件的快速发展人们对位置信息和定位服务有了越来越多的需求。很多应用对定位信息要求更加细致准确。室外定位渐渐不能满足应用的需求室内定位技术在近年来受到研究人员的关注。RFID又称射频识别技术是一种非接触式的自动识别技术。RFID标签具有体积小、读写范围广、寿命长、抗干扰能力强等特点可支持快速读写、移动识别、多目标识别、唯一表示等。与GPS等成熟的定位技术相比RFID更适合应用于室内定位。有源RFID标签相比无源标签有更远的识别距离和更