
一种定位与误差补偿方法.pdf

一条****杉淑


1/6
2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种定位与误差补偿方法.pdf
一种定位与误差补偿方法,根据待测空间分布式相机的构型定制专用支撑架,在支撑架上相应位置安装若干面平面反射镜,用干涉仪精确调整各平面反射镜法线之间的夹角,使之在0.5″之内,然后将支撑架整体置于支撑平台上组成高精度定位与误差补偿装置,最后调整支撑架与支撑平台至测试状态,利用精密测角仪完成对平行光管的高精度定位与误差补偿。使用该测试装置可使遥感相机视轴夹角测试及CCD线阵平行性测试中,平行光管的定位精度达到1″,并在三线阵相机集成测试中得到应用,且经过在轨检验。

微机辅助定位误差补偿方法.docx
微机辅助定位误差补偿方法微机辅助定位技术是一种通过利用微机控制和处理系统,对测量仪器、传感器等进行控制和数据处理,实现测量仪器的定位和测量的方法。在实际应用中,由于测量条件的限制或设备自身的误差,会导致定位结果存在一定的误差。为了提高测量的精度和准确性,需要对定位误差进行补偿。本文将介绍微机辅助定位误差补偿的方法。微机辅助定位误差补偿的方法可以分为以下几种:数学模型补偿法、数据拟合补偿法、传感器校准补偿法和自适应滤波算法。一、数学模型补偿法数学模型补偿法是指通过建立数学模型来描述定位误差的变化规律,从而对
一种基于RFID定位技术的定位误差补偿方法和系统.pdf
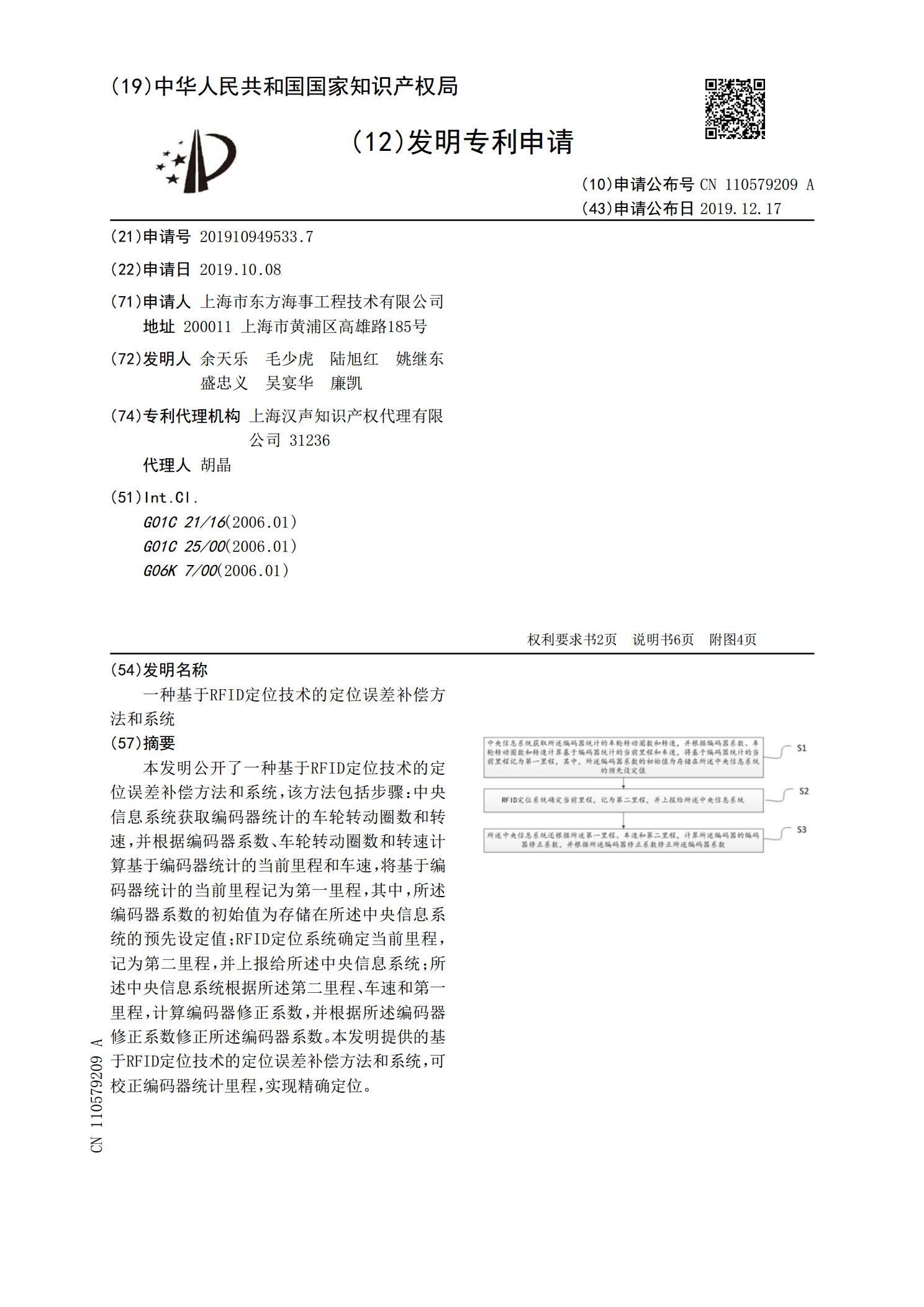
本发明公开了一种基于RFID定位技术的定位误差补偿方法和系统,该方法包括步骤:中央信息系统获取编码器统计的车轮转动圈数和转速,并根据编码器系数、车轮转动圈数和转速计算基于编码器统计的当前里程和车速,将基于编码器统计的当前里程记为第一里程,其中,所述编码器系数的初始值为存储在所述中央信息系统的预先设定值;RFID定位系统确定当前里程,记为第二里程,并上报给所述中央信息系统;所述中央信息系统根据所述第二里程、车速和第一里程,计算编码器修正系数,并根据所述编码器修正系数修正所述编码器系数。本发明提供的基于RFI

长航时激光惯导定位误差的补偿方法研究.docx
长航时激光惯导定位误差的补偿方法研究概述航空航天发展迅猛,飞行控制系统的精度和效率越来越高。作为飞行控制系统的重要组成部分,航空惯性导航系统(InertialNavigationSystem,INS)的精度也越来越受到关注。在长航时的飞行中,由于导航参数和环境条件的变化,经常会出现INS的定位误差,而激光惯导则可以有效补偿这种误差。本论文研究长航时激光惯导定位误差的补偿方法,包括激光惯导自校准和外部校准两个方面。一、激光惯导自校准激光惯导进行航迹推算时,需要准确的导航参数和姿态角。但由于噪声干扰、温度变化

一种曲线轮廓误差补偿的调节控制系统及误差补偿的方法.pdf
本发明公开了一种曲线交叉耦合轮廓误差补偿的调节控制系统,包括数控PC、曲线交叉耦合轮廓误差补偿调节运动控制卡、驱动器、伺服电机模块及位置反馈检测模块。所述的数控PC包括数控PC机、显示器及PCI接口芯片;一端与显示器相连实现人机对话,另一端通过PCI接口芯片与曲线交叉耦合轮廓误差补偿调节运动控制卡相连接,实现曲线交叉耦合轮廓误差的补偿。同时,本发明还公开了一种曲线交叉耦合轮廓误差补偿的控制方法。本发明具有调节控制效率高、稳定性好及实用性强等特点,通过调节参数p实现曲线轮廓误差交叉耦合的补偿;同时,该轮廓误