
一种四轮式轮腿机器人.pdf

秀华****魔王


1/9
2/9

3/9

4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种四轮式轮腿机器人.pdf
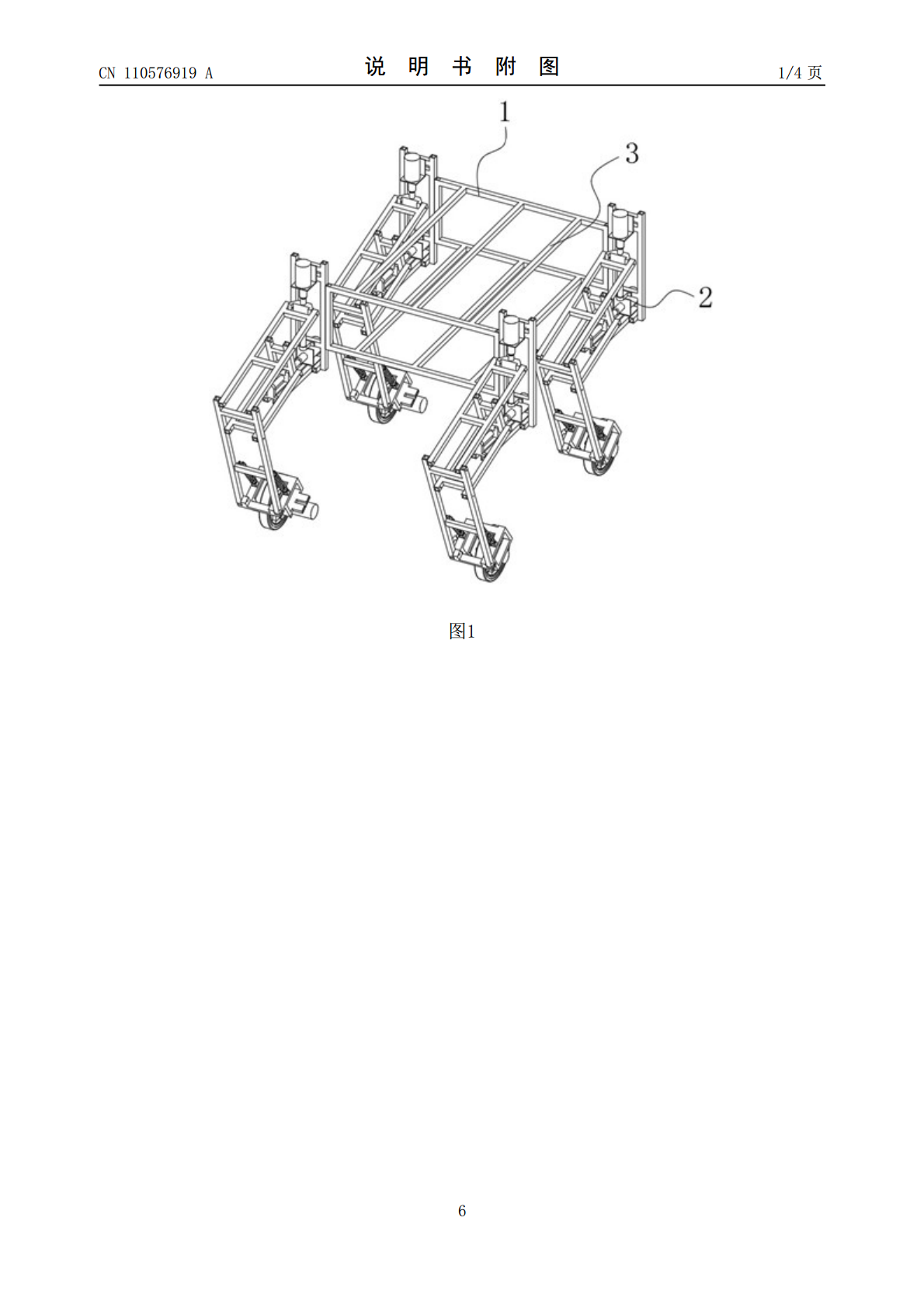
本发明公开了一种四轮式轮腿机器人,包括机架,所述机架的四个拐角位置处通过螺栓固定有腿式行走组件,所述腿式行走组件包括定位架、第一伸缩气缸、第一L形安装座、第一腿节、第二伸缩气缸、第二L形安装座、底座架、第二腿节、足节和轮式机构,所述定位架通过螺栓固定在机架的四个拐角位置处,所述定位架的顶部一侧通过第一L形安装座固定有第一伸缩气缸,所述第一伸缩气缸的顶部通过活动连接块与第一腿节的顶端活动连接。本发明结构新颖,构思巧妙,拥有轮式和腿式这两种运行模式,其中轮式适用于平坦地形下的快速移动,腿式适用于通过复杂环境,

一种双臂四轮式巡检机器人机构.pdf
本发明涉及一种移动机器人,具体地说是一种双臂四轮式巡检机器人机构,包括箱体及结构相同的前、后手臂机构,前、后手臂机构分别安装在箱体上,每个手臂机构上均包括行走机构、翻转机构、俯仰机构、夹紧机构及支撑臂,支撑臂的一端与箱体相连,另一端铰接有俯仰机构,俯仰机构的两端分别设有前、后翻转机构,可由水平状态翻转至垂直状态的前、后行走机构分别连接于前、后翻转机构的输出端,前、后行走机构及前、后翻转机构与俯仰机构连动;在前、后行走机构的正下方设有安装在支撑臂上、可上下移动夹紧地线的夹紧机构。本发明机器人机构具有安全保护
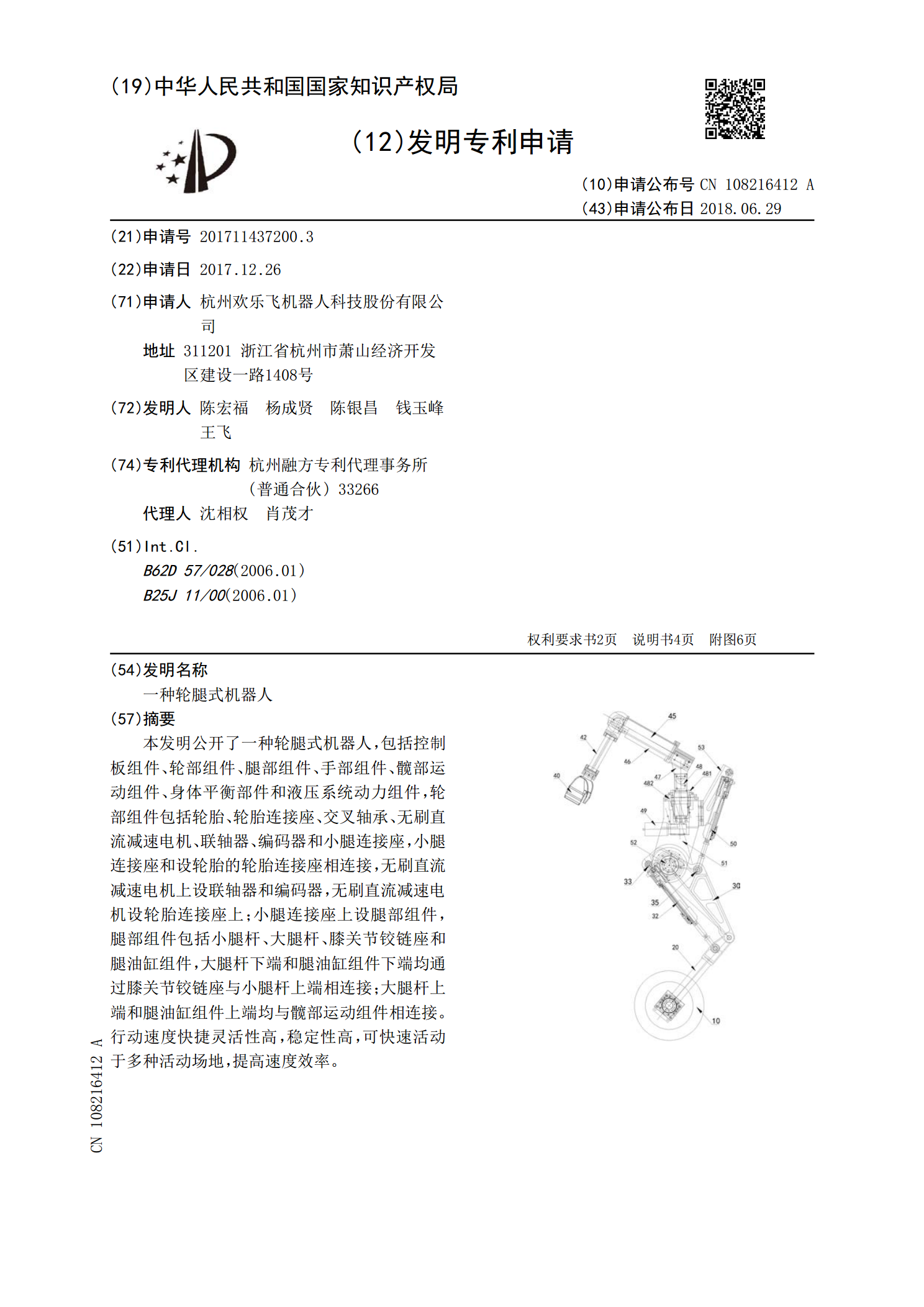
一种轮腿式机器人.pdf
本发明公开了一种轮腿式机器人,包括控制板组件、轮部组件、腿部组件、手部组件、髋部运动组件、身体平衡部件和液压系统动力组件,轮部组件包括轮胎、轮胎连接座、交叉轴承、无刷直流减速电机、联轴器、编码器和小腿连接座,小腿连接座和设轮胎的轮胎连接座相连接,无刷直流减速电机上设联轴器和编码器,无刷直流减速电机设轮胎连接座上;小腿连接座上设腿部组件,腿部组件包括小腿杆、大腿杆、膝关节铰链座和腿油缸组件,大腿杆下端和腿油缸组件下端均通过膝关节铰链座与小腿杆上端相连接;大腿杆上端和腿油缸组件上端均与髋部运动组件相连接。行动
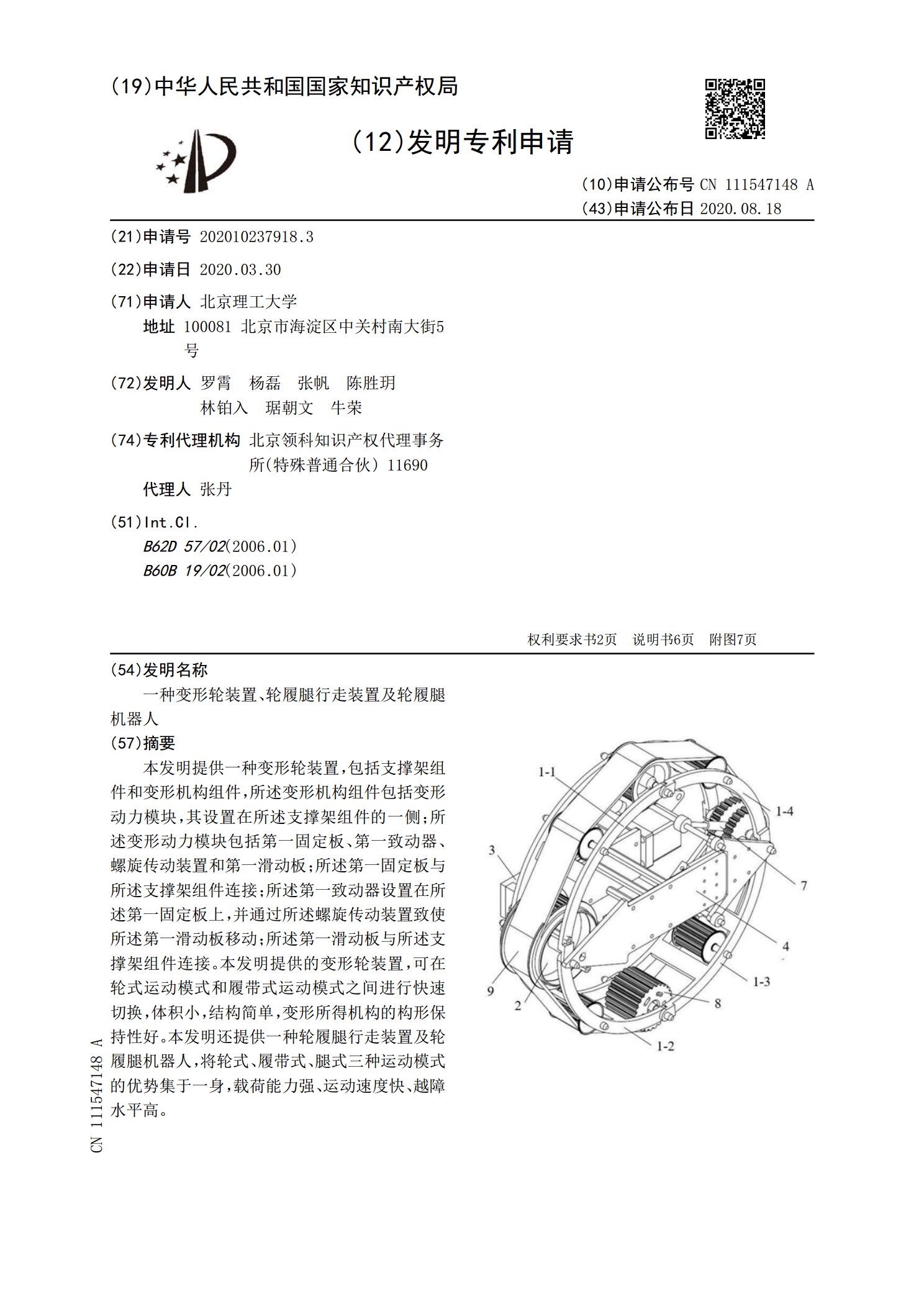
一种变形轮装置、轮履腿行走装置及轮履腿机器人.pdf
本发明提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。本发明提供的变形轮装置,可在轮式运动模式和履带式运动模式之间进行快速切换,体积小,结构简单,变形所得机构的构形保持性好。本发明还提供一种轮履腿行走装置及轮履腿机器人
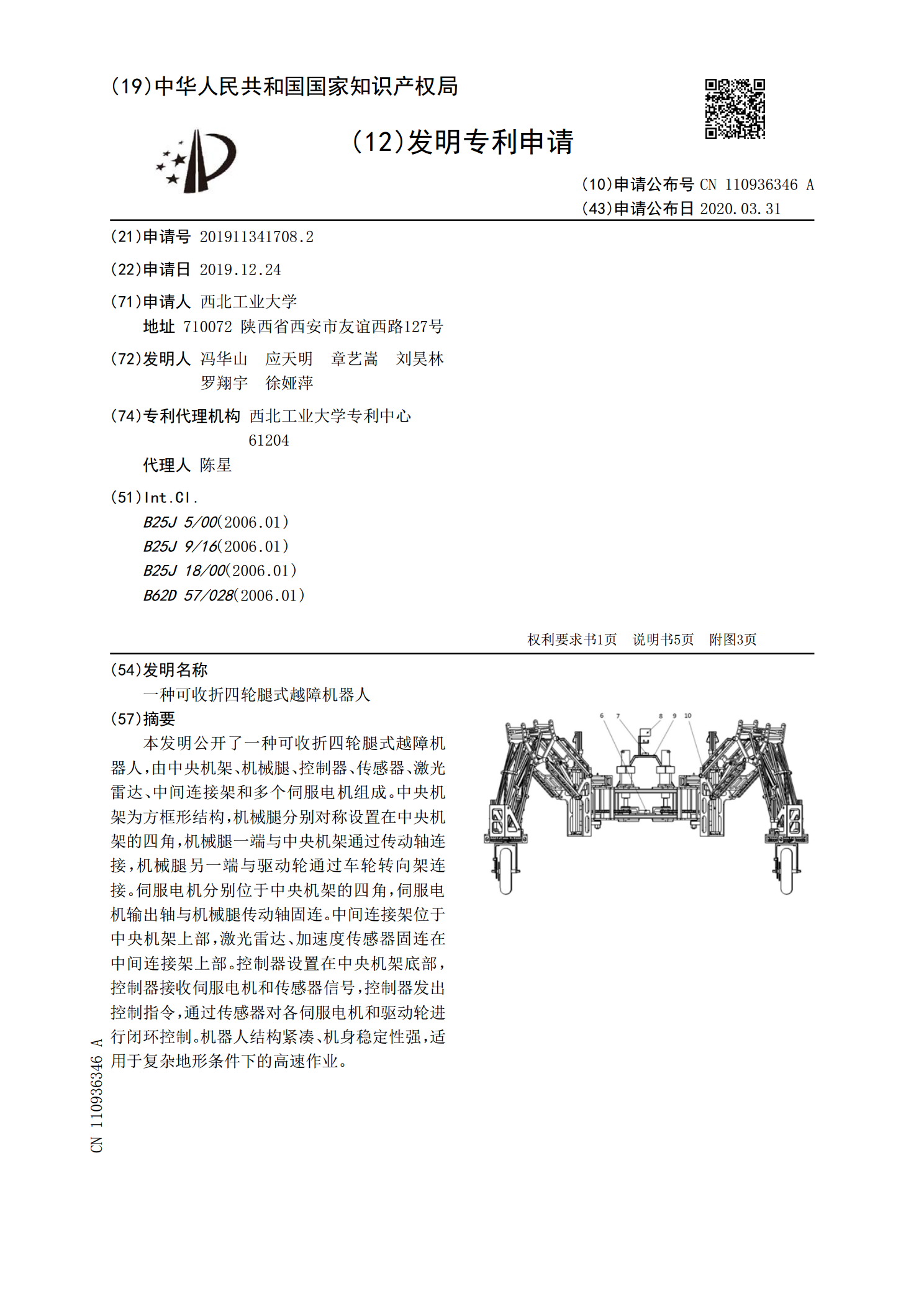
一种可收折四轮腿式越障机器人.pdf
本发明公开了一种可收折四轮腿式越障机器人,由中央机架、机械腿、控制器、传感器、激光雷达、中间连接架和多个伺服电机组成。中央机架为方框形结构,机械腿分别对称设置在中央机架的四角,机械腿一端与中央机架通过传动轴连接,机械腿另一端与驱动轮通过车轮转向架连接。伺服电机分别位于中央机架的四角,伺服电机输出轴与机械腿传动轴固连。中间连接架位于中央机架上部,激光雷达、加速度传感器固连在中间连接架上部。控制器设置在中央机架底部,控制器接收伺服电机和传感器信号,控制器发出控制指令,通过传感器对各伺服电机和驱动轮进行闭环控制