
一种外骨骼式辅助增力机械手臂.pdf

努力****梓颖

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种外骨骼式辅助增力机械手臂.pdf
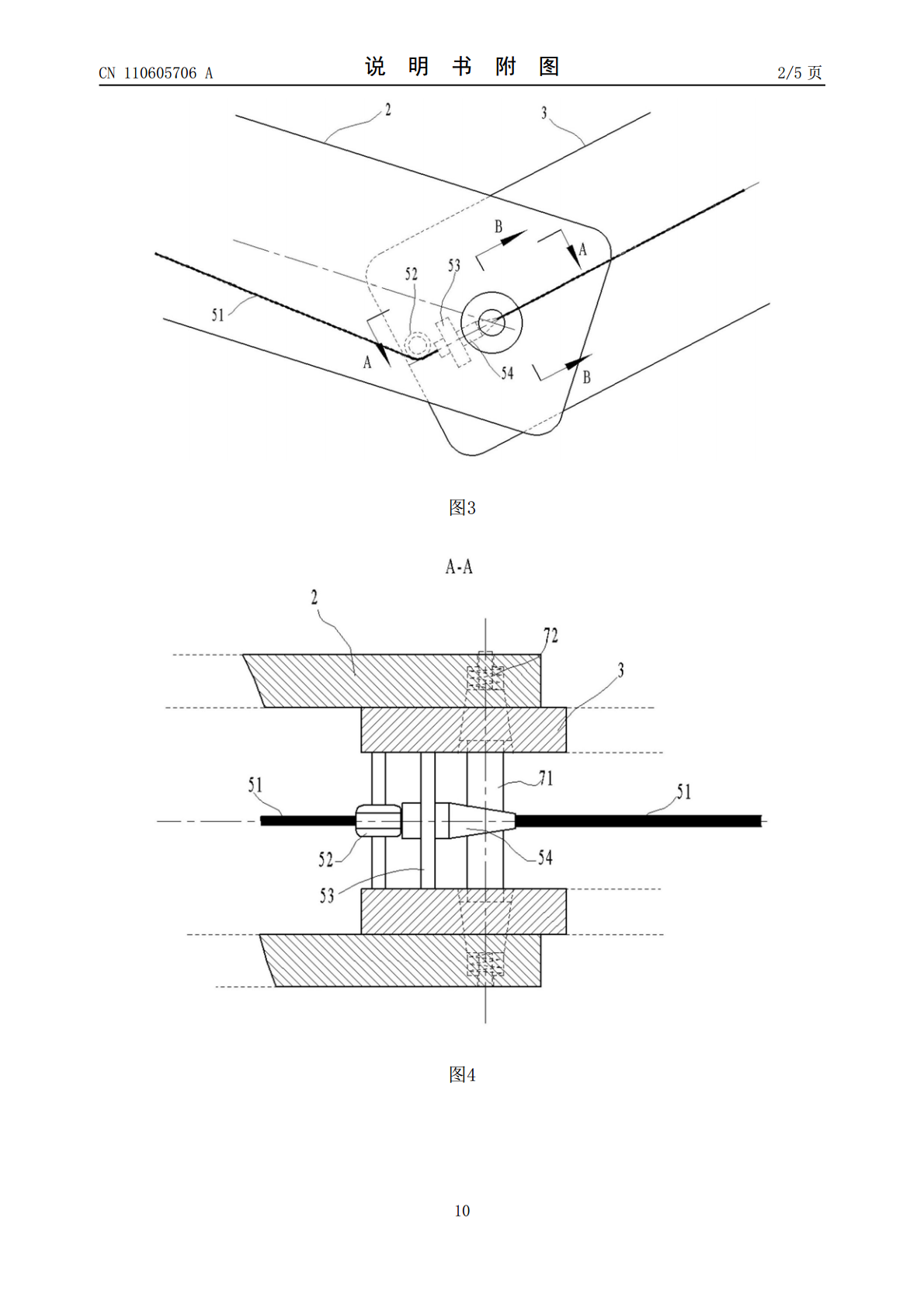
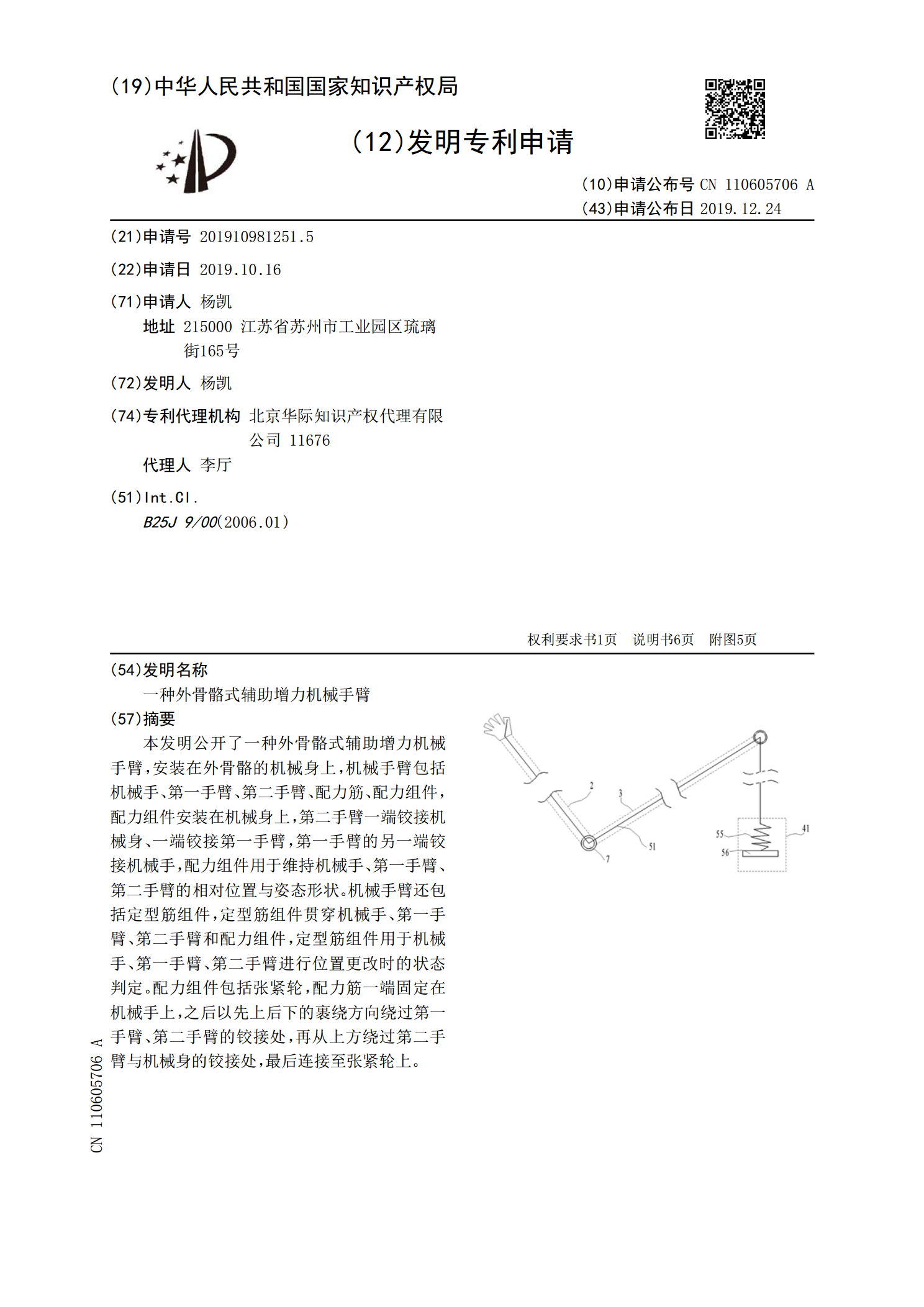
本发明公开了一种外骨骼式辅助增力机械手臂,安装在外骨骼的机械身上,机械手臂包括机械手、第一手臂、第二手臂、配力筋、配力组件,配力组件安装在机械身上,第二手臂一端铰接机械身、一端铰接第一手臂,第一手臂的另一端铰接机械手,配力组件用于维持机械手、第一手臂、第二手臂的相对位置与姿态形状。机械手臂还包括定型筋组件,定型筋组件贯穿机械手、第一手臂、第二手臂和配力组件,定型筋组件用于机械手、第一手臂、第二手臂进行位置更改时的状态判定。配力组件包括张紧轮,配力筋一端固定在机械手上,之后以先上后下的裹绕方向绕过第一手臂、

具有弹性辅助的关节式机械手臂.pdf
本发明提供一种具有弹性辅助的关节式机械手臂,包含一座体、一动力装置、一机械手臂本体及一弹性辅助件。该动力装置安装于该座体。该机械手臂本体包含一摆臂,该摆臂受该动力装置驱动而以一转轴为中心旋转。该弹性辅助件包含一拉伸弹簧,该拉伸弹簧围绕该转轴,该拉伸弹簧的一端连接该座体或该动力装置,该拉伸弹簧的另一端连接该摆臂,以提供该摆臂一弹性支撑力。
一种穿戴式下肢辅助起立外骨骼.pdf
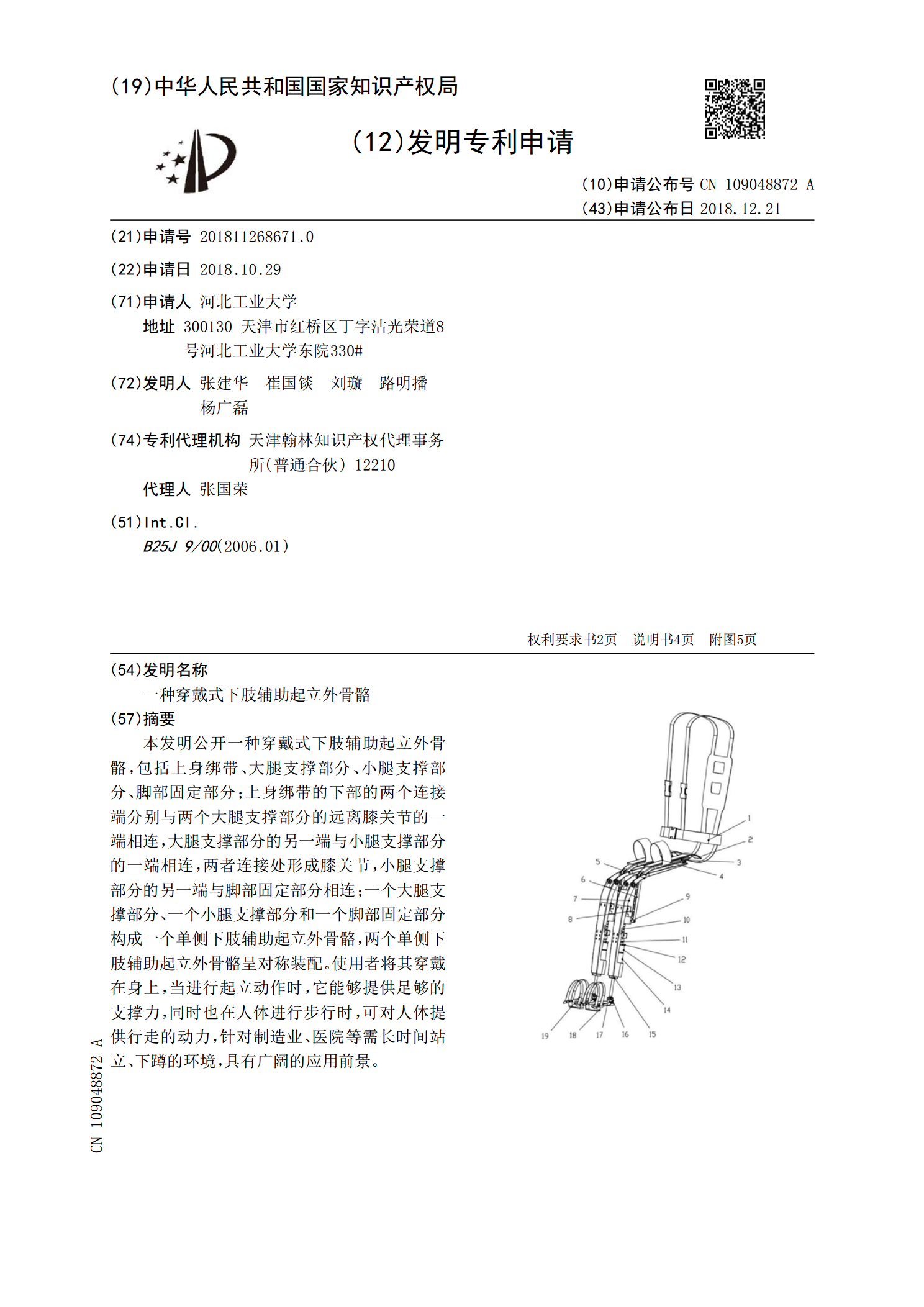
本发明公开一种穿戴式下肢辅助起立外骨骼,包括上身绑带、大腿支撑部分、小腿支撑部分、脚部固定部分;上身绑带的下部的两个连接端分别与两个大腿支撑部分的远离膝关节的一端相连,大腿支撑部分的另一端与小腿支撑部分的一端相连,两者连接处形成膝关节,小腿支撑部分的另一端与脚部固定部分相连;一个大腿支撑部分、一个小腿支撑部分和一个脚部固定部分构成一个单侧下肢辅助起立外骨骼,两个单侧下肢辅助起立外骨骼呈对称装配。使用者将其穿戴在身上,当进行起立动作时,它能够提供足够的支撑力,同时也在人体进行步行时,可对人体提供行走的动力,
一种可穿戴式辅助手臂康复机.pdf
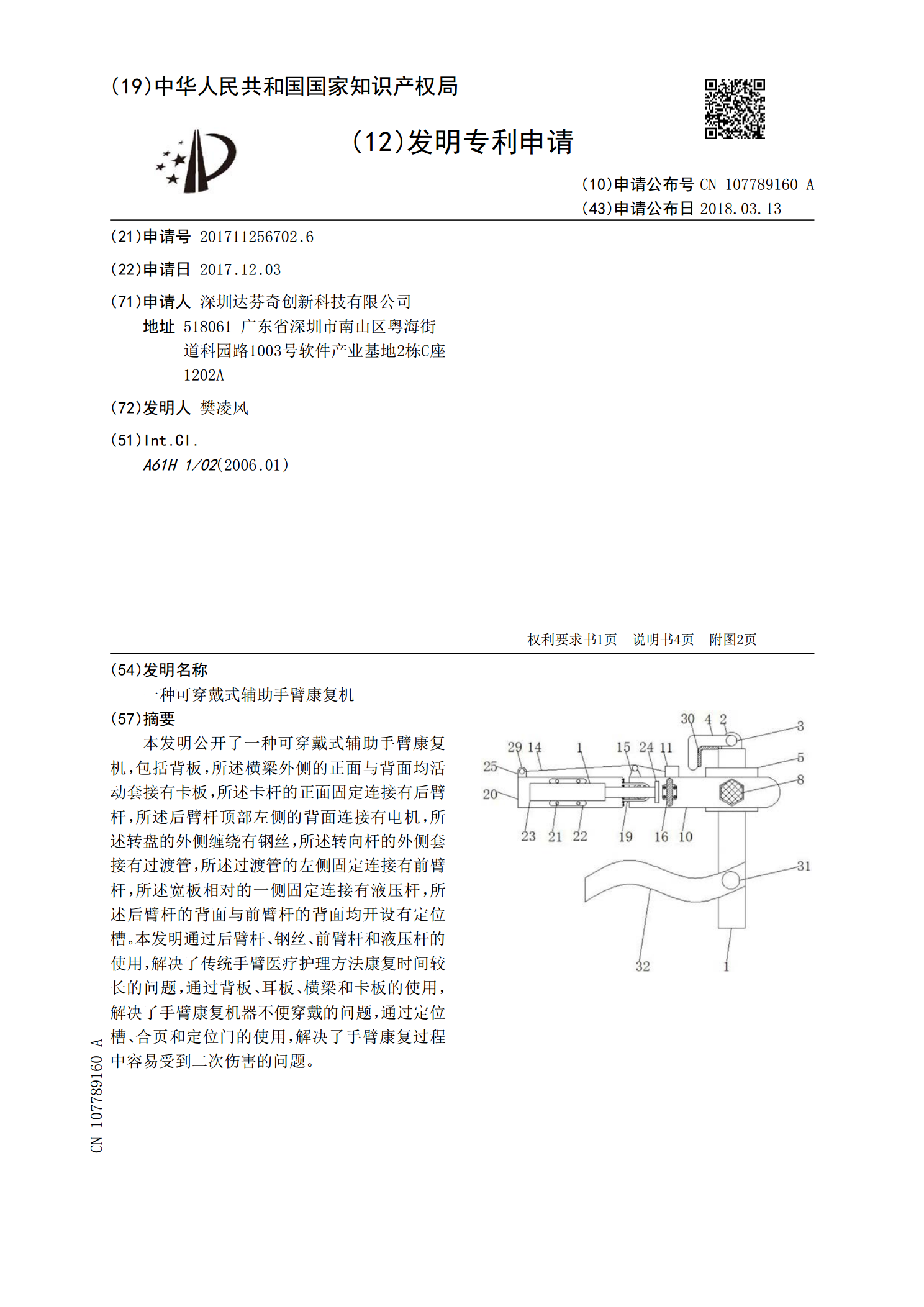
本发明公开了一种可穿戴式辅助手臂康复机,包括背板,所述横梁外侧的正面与背面均活动套接有卡板,所述卡杆的正面固定连接有后臂杆,所述后臂杆顶部左侧的背面连接有电机,所述转盘的外侧缠绕有钢丝,所述转向杆的外侧套接有过渡管,所述过渡管的左侧固定连接有前臂杆,所述宽板相对的一侧固定连接有液压杆,所述后臂杆的背面与前臂杆的背面均开设有定位槽。本发明通过后臂杆、钢丝、前臂杆和液压杆的使用,解决了传统手臂医疗护理方法康复时间较长的问题,通过背板、耳板、横梁和卡板的使用,解决了手臂康复机器不便穿戴的问题,通过定位槽、合页和

一种外科缝合辅助智能机械手臂.pdf
本发明公开了一种外科缝合辅助智能机械手臂,包括底座和支撑柱,支撑柱上活动设有延伸臂,延伸臂中设有放料罐和滑行气缸,滑行气缸的顶面设有固定铰链座,固定铰链座中铰接有活动铰链架,活动铰链架中设有一对折弯夹臂,两个折弯夹臂正对着放料罐上具有的进料通槽。本发明的优点在于:延伸臂上设有放料罐,延伸臂中设有可移动的夹料板,夹料板能够自动伸入放料罐并夹取止血棉布,然后自动将止血棉布放入放料盒内,从而方便医生能够快速夹取到止血棉布,提高手术效率,此外,延伸臂的下方设有医疗垃圾通道,在手术完成后,位于滑行气缸底部的消毒水喷