
具有弹性辅助的关节式机械手臂.pdf

音景****ka

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有弹性辅助的关节式机械手臂.pdf
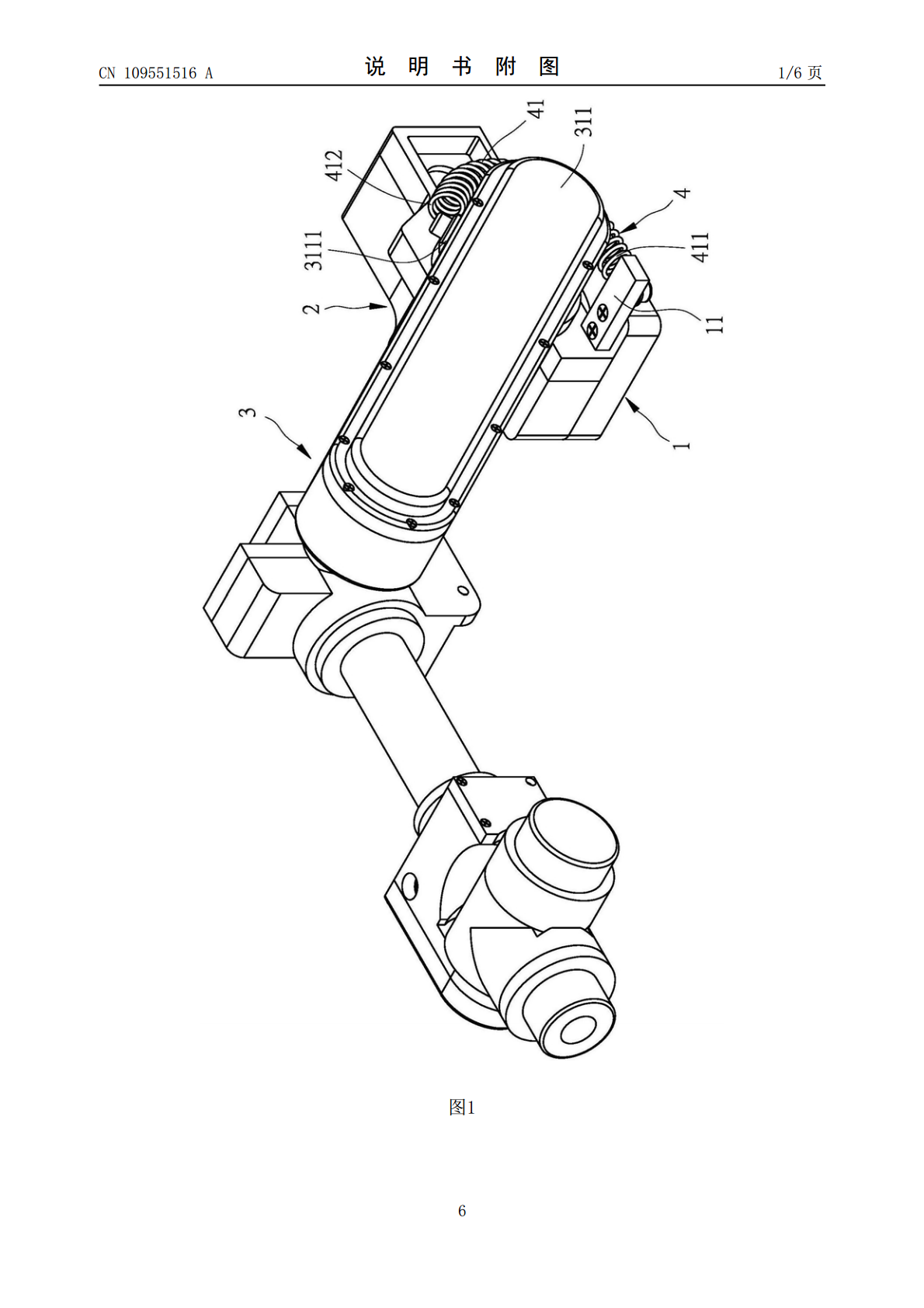
本发明提供一种具有弹性辅助的关节式机械手臂,包含一座体、一动力装置、一机械手臂本体及一弹性辅助件。该动力装置安装于该座体。该机械手臂本体包含一摆臂,该摆臂受该动力装置驱动而以一转轴为中心旋转。该弹性辅助件包含一拉伸弹簧,该拉伸弹簧围绕该转轴,该拉伸弹簧的一端连接该座体或该动力装置,该拉伸弹簧的另一端连接该摆臂,以提供该摆臂一弹性支撑力。

关节护具的辅助弹性装置.pdf
本发明提供一种关节护具的辅助弹性装置,该装置对应设置于人体关节的外部侧边,能够在人体活动时对关节产生辅助弹性作用。该辅助弹性装置包含一由复数个串连枢接的枢接件所组成的连结主体,所述连结主体内贯穿有一穿槽,该穿槽内活动设置至少一呈长条状的弹力肋条,所述连结主体的两端分别插入套接在二定位片上,凭借该定位片能将连结主体固定在关节护具上。使用时,连结主体以及弹力肋条能随着关节活动方向弯曲,且其中的弹力肋条能够在人体关节弯曲时提供弹性支撑力与弹性恢复力,同时达到关节护具轻量化以及减轻关节负担的目的。
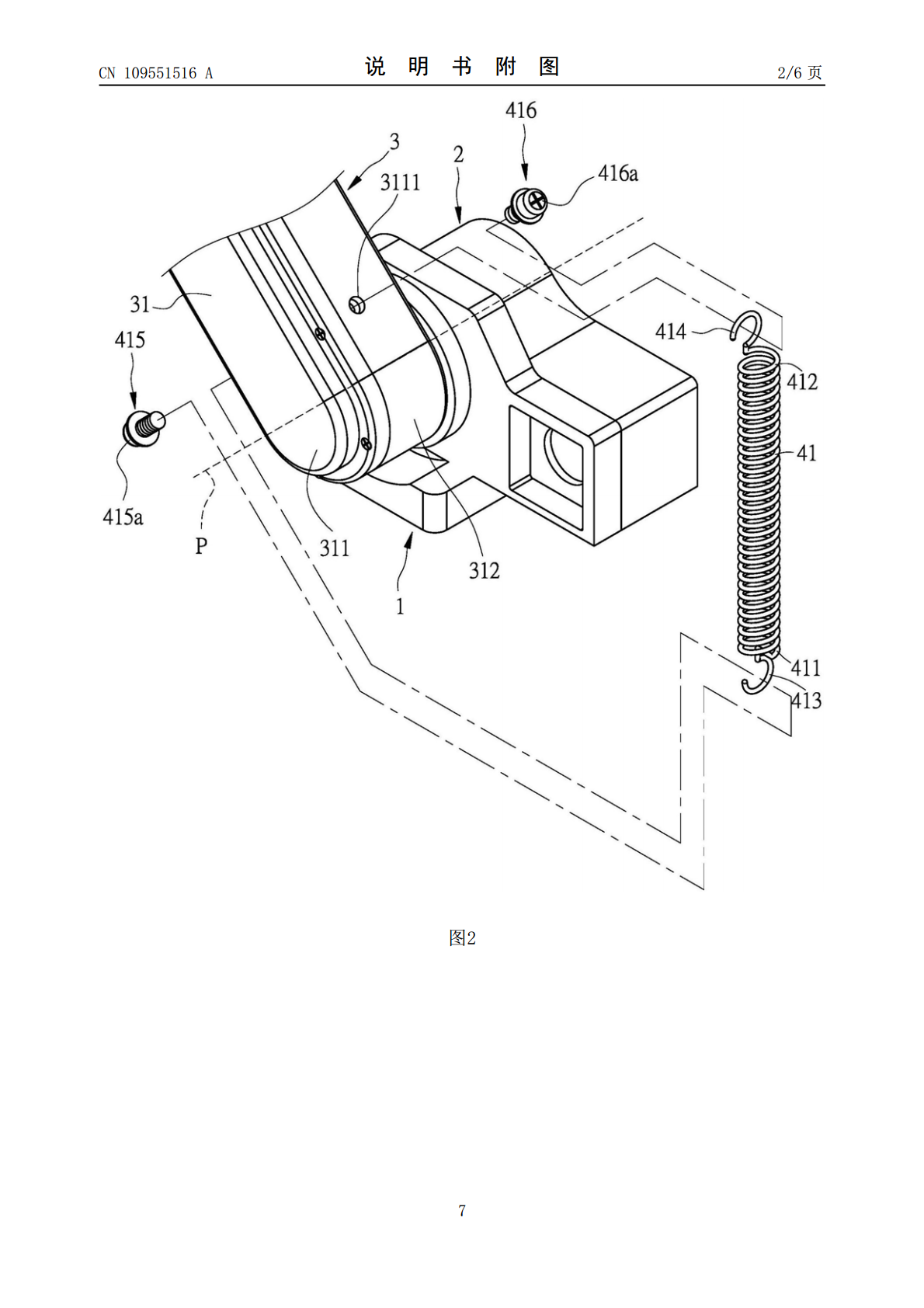
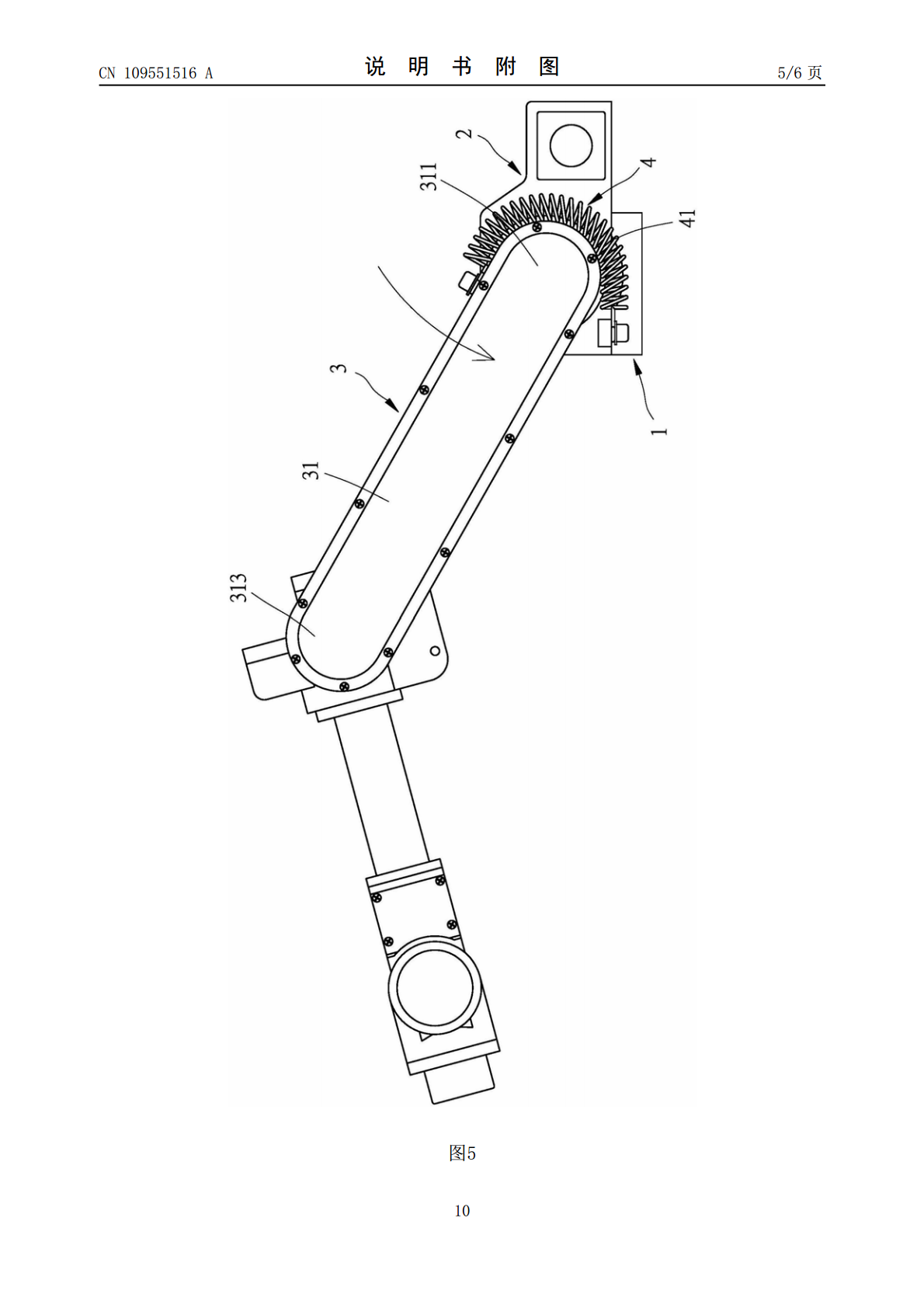
一种外骨骼式辅助增力机械手臂.pdf
本发明公开了一种外骨骼式辅助增力机械手臂,安装在外骨骼的机械身上,机械手臂包括机械手、第一手臂、第二手臂、配力筋、配力组件,配力组件安装在机械身上,第二手臂一端铰接机械身、一端铰接第一手臂,第一手臂的另一端铰接机械手,配力组件用于维持机械手、第一手臂、第二手臂的相对位置与姿态形状。机械手臂还包括定型筋组件,定型筋组件贯穿机械手、第一手臂、第二手臂和配力组件,定型筋组件用于机械手、第一手臂、第二手臂进行位置更改时的状态判定。配力组件包括张紧轮,配力筋一端固定在机械手上,之后以先上后下的裹绕方向绕过第一手臂、

机械关节与应用其的机械手臂.pdf
本发明公开了一种机械关节与应用其的机械手臂,机械关节包含中空轴、第一齿轮、多个马达、多个第二齿轮、编码器以及数字处理驱动单元。第一齿轮固定于中空轴。马达围绕中空轴设置,每一马达分别具有一转轴。第二齿轮固定于转轴并与第一齿轮啮合,马达驱动第二齿轮以使中空轴转动。编码器设置于马达其中一者相对于第二齿轮的一侧。编码器的信号回传至数字处理驱动单元,以驱动马达。本发明的机械关节中使用多个马达配合齿轮以驱动中空轴转动,可以有效提升中空轴的输出扭力,并降低减速的幅度。使用者更可依照不同的需求,调整马达的数量,改变机械关

一种具有六关节的手臂机器人.pdf
本发明提供一种具有六关节的手臂机器人,包括四轴组件,所述四轴组件关节手臂和用于控制关节手臂旋转工作的驱动机构一;所述关节手臂为可拆卸结构,其包括小臂连接体、肘部和小臂;所述驱动机构一包括相互连接的伺服电机一和减速机一,减速机一设置在肘部上;所述小臂连接体的一端与小臂可拆卸连接,另一端与肘部上的减速机一输出端可拆卸连接。本发明具有六关节的手臂机器人能胜任高强度重复性工作,并具有灵活性强和安装调整方便的特点。同时,该手臂机器人结构紧凑,并有利于齿轮部件的配合间隙调整。