
一种拳击健身辅助机器人.pdf

是你****晨呀

1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种拳击健身辅助机器人.pdf
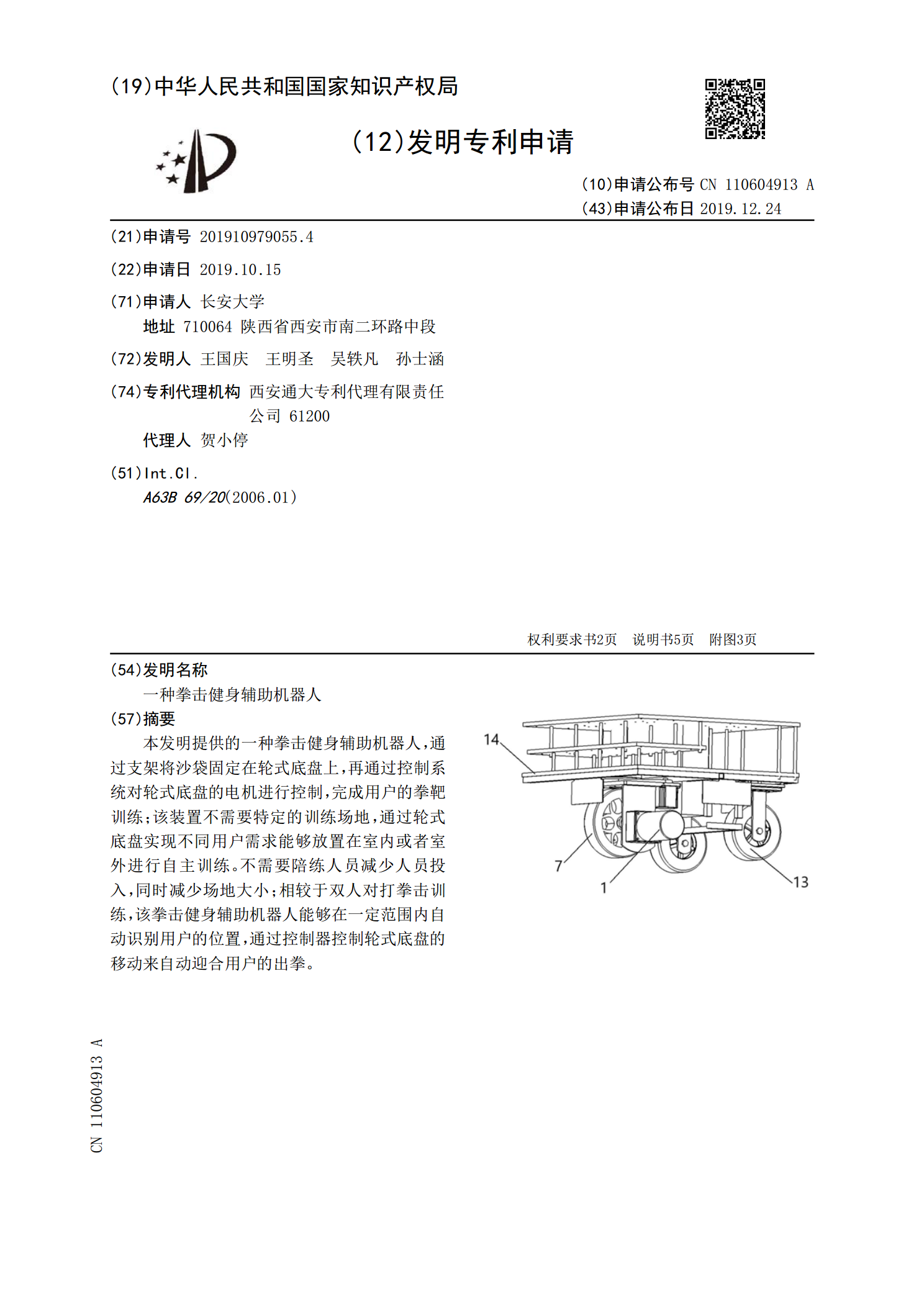
本发明提供的一种拳击健身辅助机器人,通过支架将沙袋固定在轮式底盘上,再通过控制系统对轮式底盘的电机进行控制,完成用户的拳靶训练;该装置不需要特定的训练场地,通过轮式底盘实现不同用户需求能够放置在室内或者室外进行自主训练。不需要陪练人员减少人员投入,同时减少场地大小;相较于双人对打拳击训练,该拳击健身辅助机器人能够在一定范围内自动识别用户的位置,通过控制器控制轮式底盘的移动来自动迎合用户的出拳。

一种拳击训练教学用辅助设备.pdf
本发明公开了一种拳击训练教学用辅助设备,涉及拳击训练设备技术领域,包括底座,底座的顶部固定安装有电动伸缩柱,电动伸缩柱的一侧转动连接有支撑架,支撑架的内部开设有第一滑槽,第一滑槽的内部转动连接有丝杆,支撑架的一侧固定安装有第一电机,第一电机的输出端与丝杆固定连接。本发明的有益效果为:该拳击训练教学用辅助设备,通过吊球与支架组合,便于设备的安装和移动,吊球的顶部且位于支架的一侧安装有移动装置,使吊球在受到力的作用回弹时,能够来回移动,与吊球顶部的滑轮组和电机相配合,控制拳击吊球的升降和旋转,从而最大程度模拟
一种拳击训练辅助装置及其控制方法.pdf
本发明涉及健身设备技术领域,具体公开了一种拳击训练辅助装置及其控制方法,该拳击训练辅助装置包括底座,支撑杆,拳击袋,该装置还包括设置在拳击袋内并依次电连接的监测机构、控制机构和显示机构,本发明提供的拳击训练辅助装置,通过对显示机构的控制,显示拳击的力度和位置,可以使训练数据可视化,通过位置监测方式控制显示机构,还使得本发明显示范围可覆盖整个拳击袋,可做动画显示,具有显示效果好,稳定性高等特点。

一种双臂型拳击陪练机器人.pdf
本发明涉及一种双臂型拳击陪练机器人。属于计算机技术辅助机器人应用于体育运动领域,包括立体视觉装置、靶区装置、机械双臂装置、数据处理装置及信息显示互动装置;立体视觉装置用于提供对拳击运动员运动数据的测量;靶区装置用于提供运动员的攻击训练;机械双臂装置用于模仿真人出拳攻击,提供对运动员的防御训练;数据处理装置用于软件实现对压力传感器数据、立体视觉图像数据的读取、分析,对双机械臂的操作和控制;信息显示互动装置提供对运动数据、动作姿态评分和错误提示显示及人机交互的功能。本发明能缓解大众对拳击运动的教练需求,提高拳
一种健身辅助装置.pdf
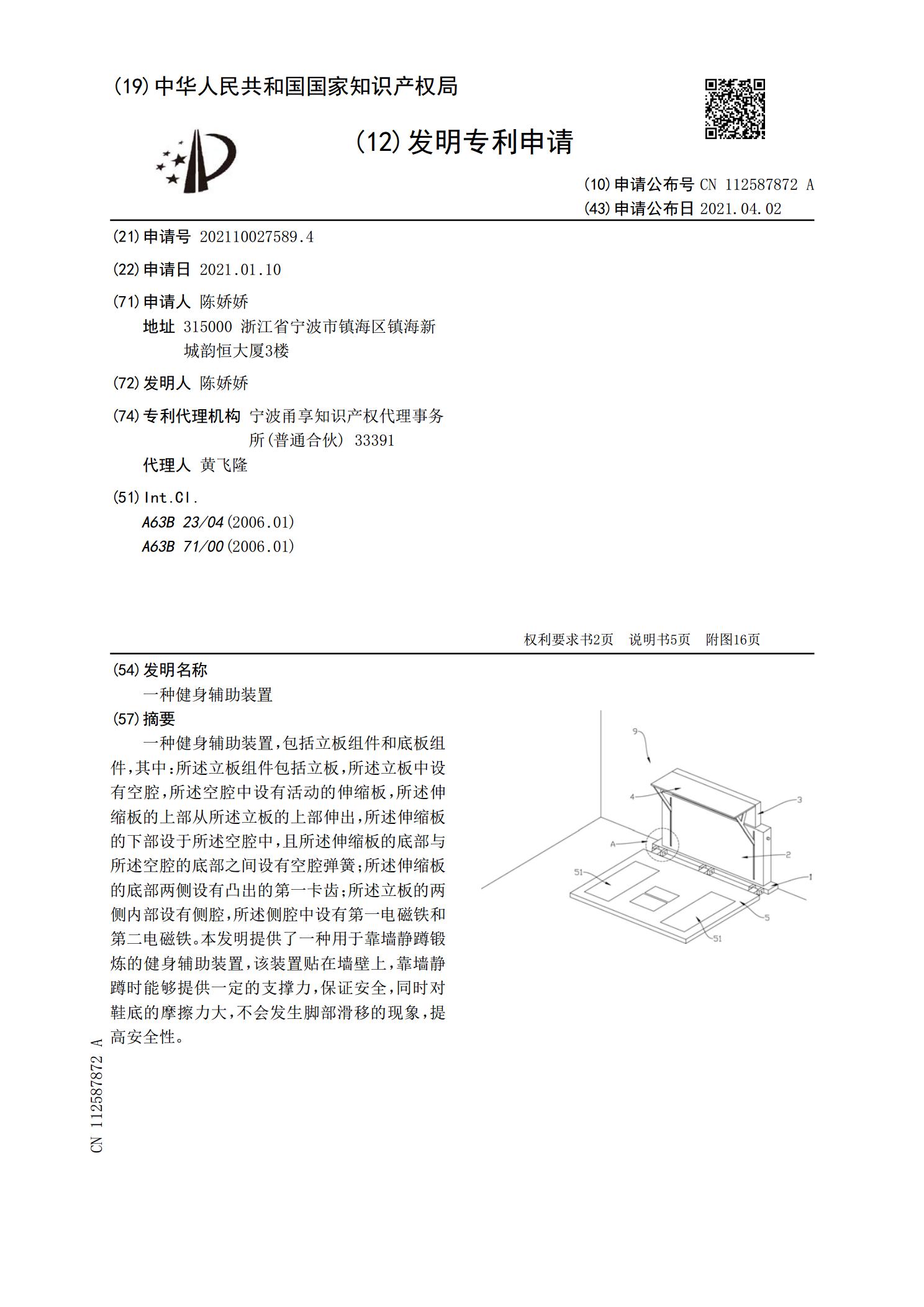
一种健身辅助装置,包括立板组件和底板组件,其中:所述立板组件包括立板,所述立板中设有空腔,所述空腔中设有活动的伸缩板,所述伸缩板的上部从所述立板的上部伸出,所述伸缩板的下部设于所述空腔中,且所述伸缩板的底部与所述空腔的底部之间设有空腔弹簧;所述伸缩板的底部两侧设有凸出的第一卡齿;所述立板的两侧内部设有侧腔,所述侧腔中设有第一电磁铁和第二电磁铁。本发明提供了一种用于靠墙静蹲锻炼的健身辅助装置,该装置贴在墙壁上,靠墙静蹲时能够提供一定的支撑力,保证安全,同时对鞋底的摩擦力大,不会发生脚部滑移的现象,提高安全性