
一种基于相移轮廓术的多运动物体三维重构方法.pdf

长春****主a

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于相移轮廓术的多运动物体三维重构方法.pdf
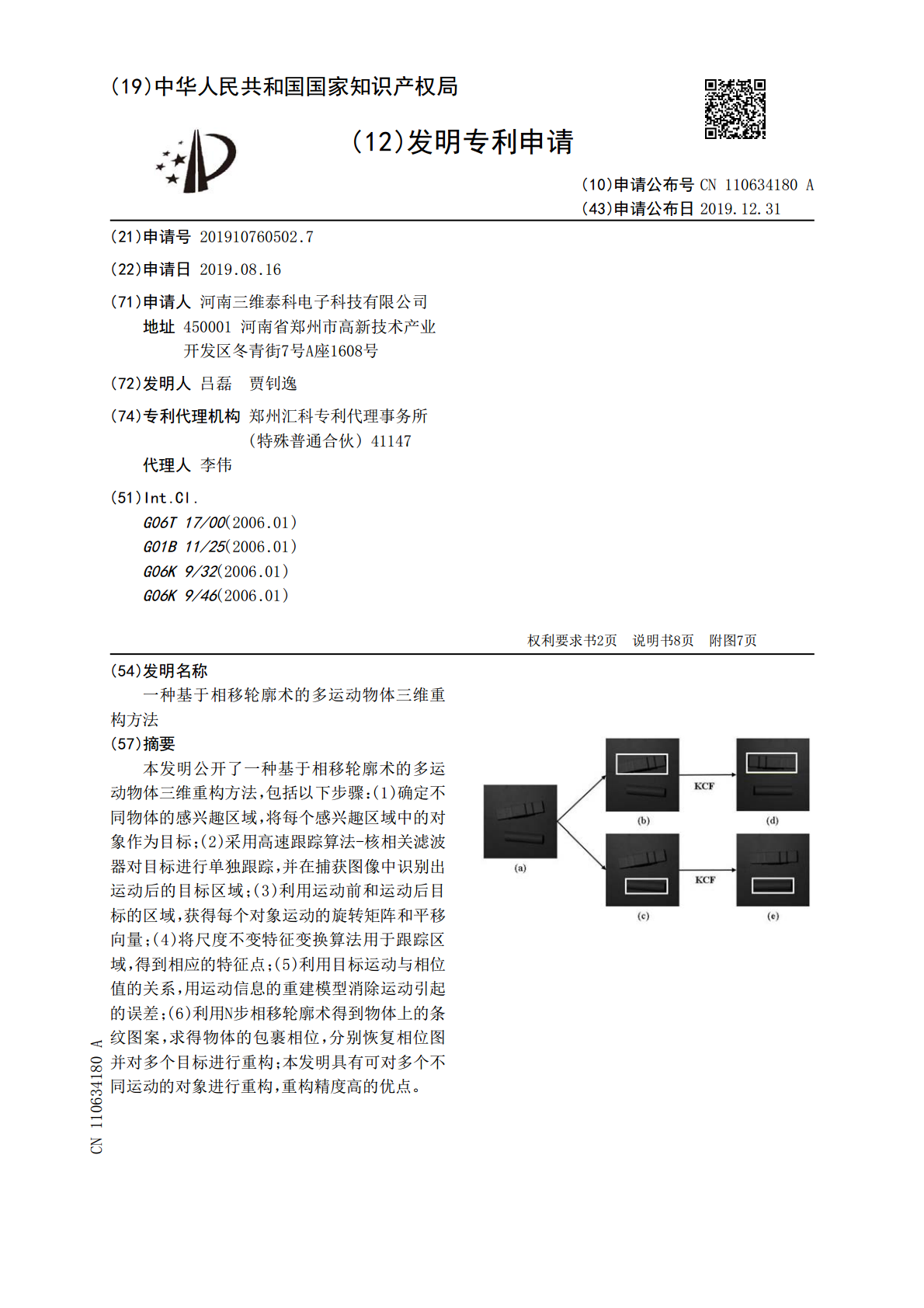
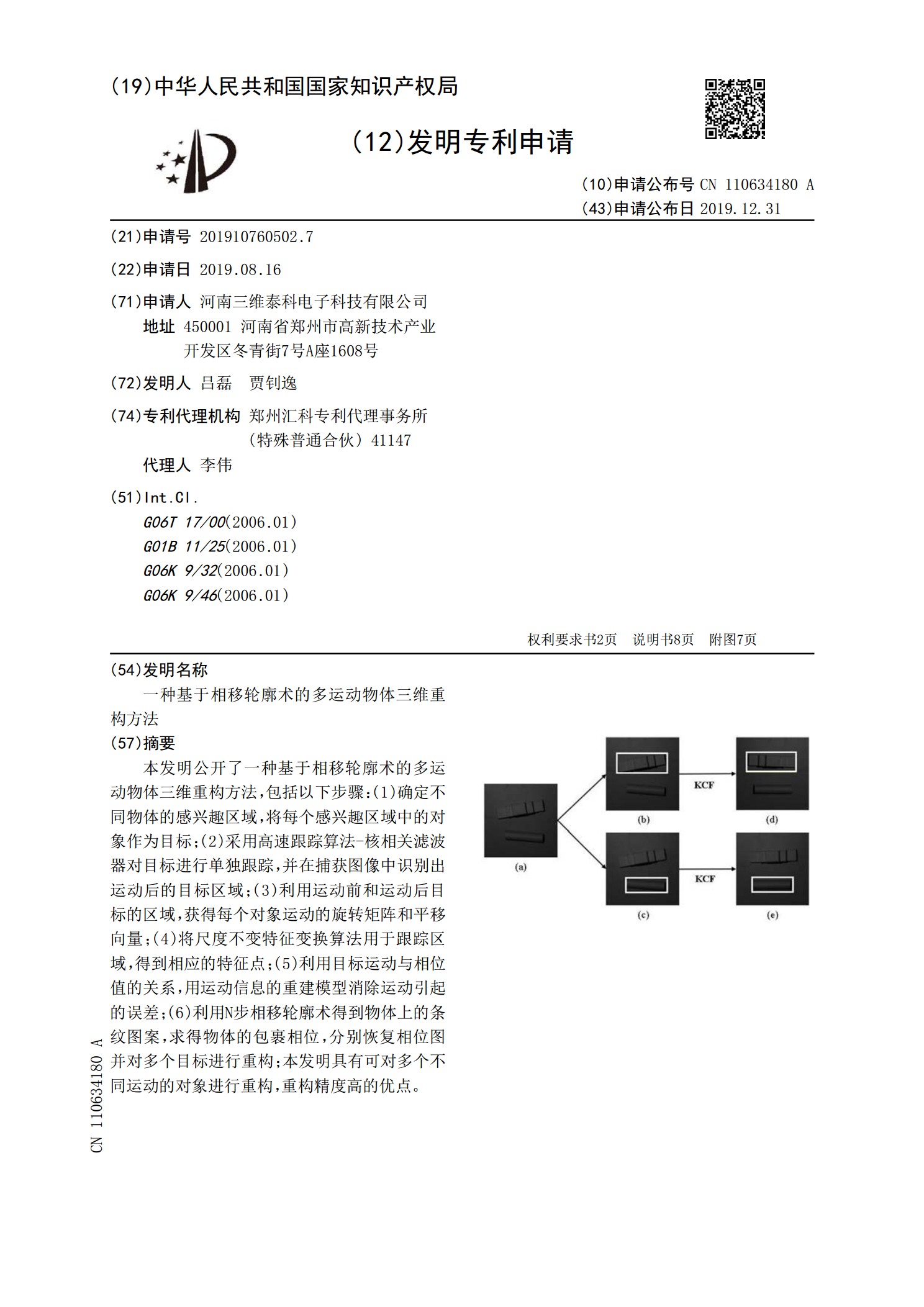
本发明公开了一种基于相移轮廓术的多运动物体三维重构方法,包括以下步骤:(1)确定不同物体的感兴趣区域,将每个感兴趣区域中的对象作为目标;(2)采用高速跟踪算法‑核相关滤波器对目标进行单独跟踪,并在捕获图像中识别出运动后的目标区域;(3)利用运动前和运动后目标的区域,获得每个对象运动的旋转矩阵和平移向量;(4)将尺度不变特征变换算法用于跟踪区域,得到相应的特征点;(5)利用目标运动与相位值的关系,用运动信息的重建模型消除运动引起的误差;(6)利用N步相移轮廓术得到物体上的条纹图案,求得物体的包裹相位,分别恢

基于相移轮廓术快速三维检测系统研究.pptx
汇报人:CONTENTS添加章节标题系统概述相移轮廓术原理快速三维检测系统的构成系统应用领域系统硬件组成光源模块投影模块图像采集模块运动控制模块系统软件设计相移算法实现三维重建算法图像处理技术系统软件架构系统性能测试测试环境与方法测试结果分析系统性能评估误差来源分析系统应用案例工业检测领域应用生物医学领域应用文化遗产保护应用其他领域应用案例系统优势与局限性系统优势分析局限性分析未来研究方向汇报人:

一种基于正弦条纹相移轮廓术的标定方法及实施装置.pdf
正弦条纹相移轮廓术兼顾了精度和速度,已成为工业在线3D检测的主流技术之一,随着检测对象的日益微型化,检测精度要求也日益提高,故而需要能够补偿各种系统误差,这使得系统的标定越来越重要。本发明公开一种基于正弦条纹相移轮廓术的标定方法及实施装置,其包括:S<base:Sub>1</base:Sub>、对所有相机进行相机标定,建立不同高度下像素坐标和物理坐标关系。S<base:Sub>2</base:Sub>、投影装置投影参考图案,标定理论投影和实际投影的几何变换。S<base:Sub>3</base:Sub>,

基于相移轮廓术在日光灯下进行高速三维形状测量的方法.pdf
本发明公开了一种基于相移轮廓术在日光灯下进行高速三维形状测量的方法,对相机与投影仪进行标定,获得相机和投影仪的内参与外参;采用双四步相位轮廓测量技术,消除由日光灯所引起的相位误差,获得物体的理想相位信息;根据消除日光灯影响后的理想相位信息,获取物体在投影仪下的像素坐标,并结合相机和投影仪的内参与外参,将二维信息还原至真实的三维信息。本发明采用双四步相位轮廓测量技术,消除了由日光灯所引起的相位误差,提高了三维测量的精度。

一种相移轮廓术三维测量方法、系统、设备及其存储介质.pdf
本发明属于三维位置测量领域,具体涉及一种相移轮廓术三维测量方法、系统、设备及其存储介质,方法步骤包括:产生目标图像;获取目标图像;根据目标图像得到彩色条纹图;对彩色条纹图进行校正操作,以得到校正条纹图;根据校正条纹图得到相位信息;根据相位信息得到三维形貌信息。本发明具有可以解决光源不稳定和环境光的变化导致的物体的相位误差问题;能够满足多种工业领域的需求以及降低三维检测经济成本;在相移轮廓术系统中基于彩色编码条纹的相位误差校正方法简单,并具有很高的鲁棒性,灵活性和精度。