
一种基于最优寿命的无人机路径规划方法.pdf

宁馨****找我


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于最优寿命的无人机路径规划方法.pdf
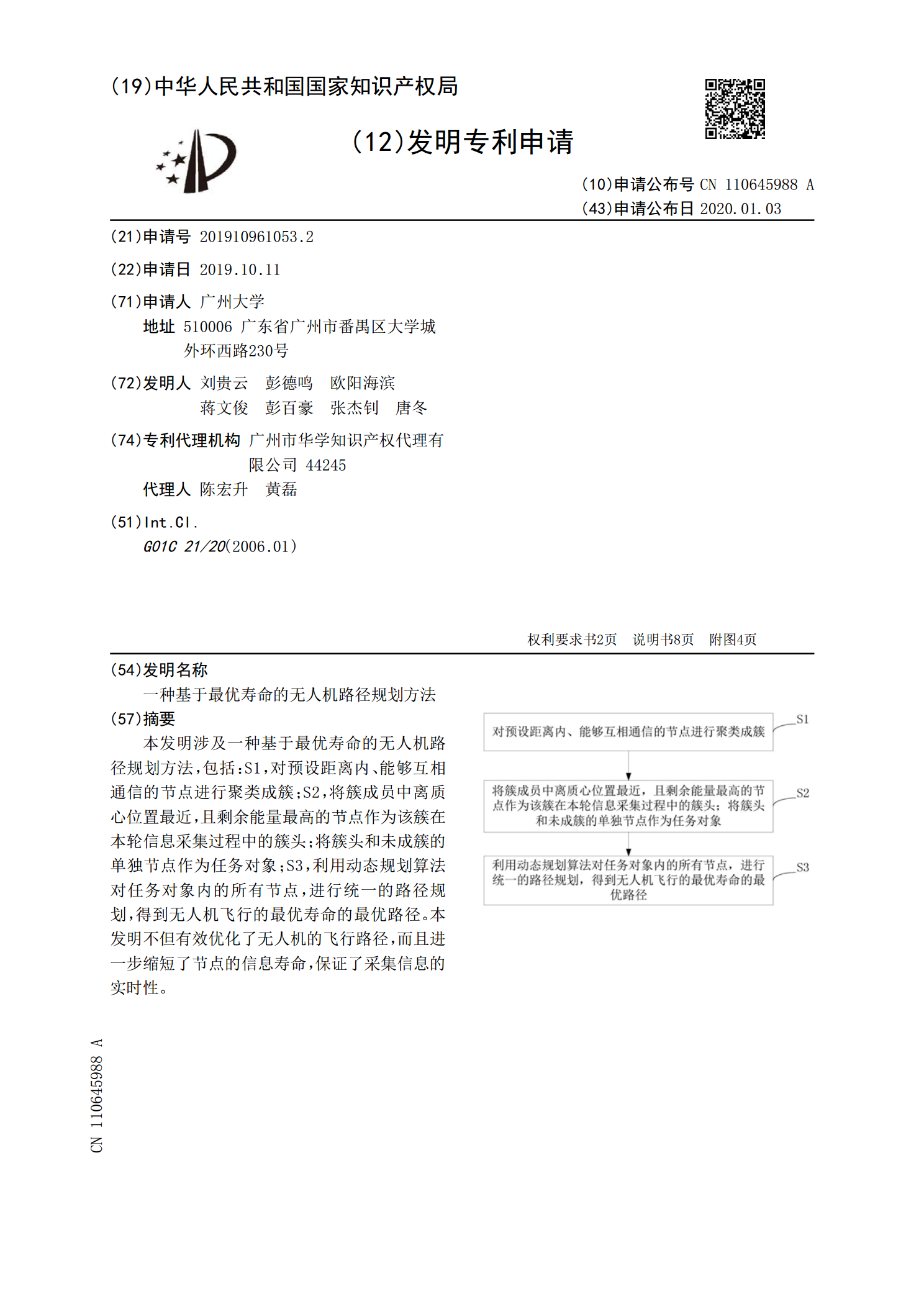
本发明涉及一种基于最优寿命的无人机路径规划方法,包括:S1,对预设距离内、能够互相通信的节点进行聚类成簇;S2,将簇成员中离质心位置最近,且剩余能量最高的节点作为该簇在本轮信息采集过程中的簇头;将簇头和未成簇的单独节点作为任务对象;S3,利用动态规划算法对任务对象内的所有节点,进行统一的路径规划,得到无人机飞行的最优寿命的最优路径。本发明不但有效优化了无人机的飞行路径,而且进一步缩短了节点的信息寿命,保证了采集信息的实时性。
一种基于路径时间代价的无人机路径规划方法及系统.pdf
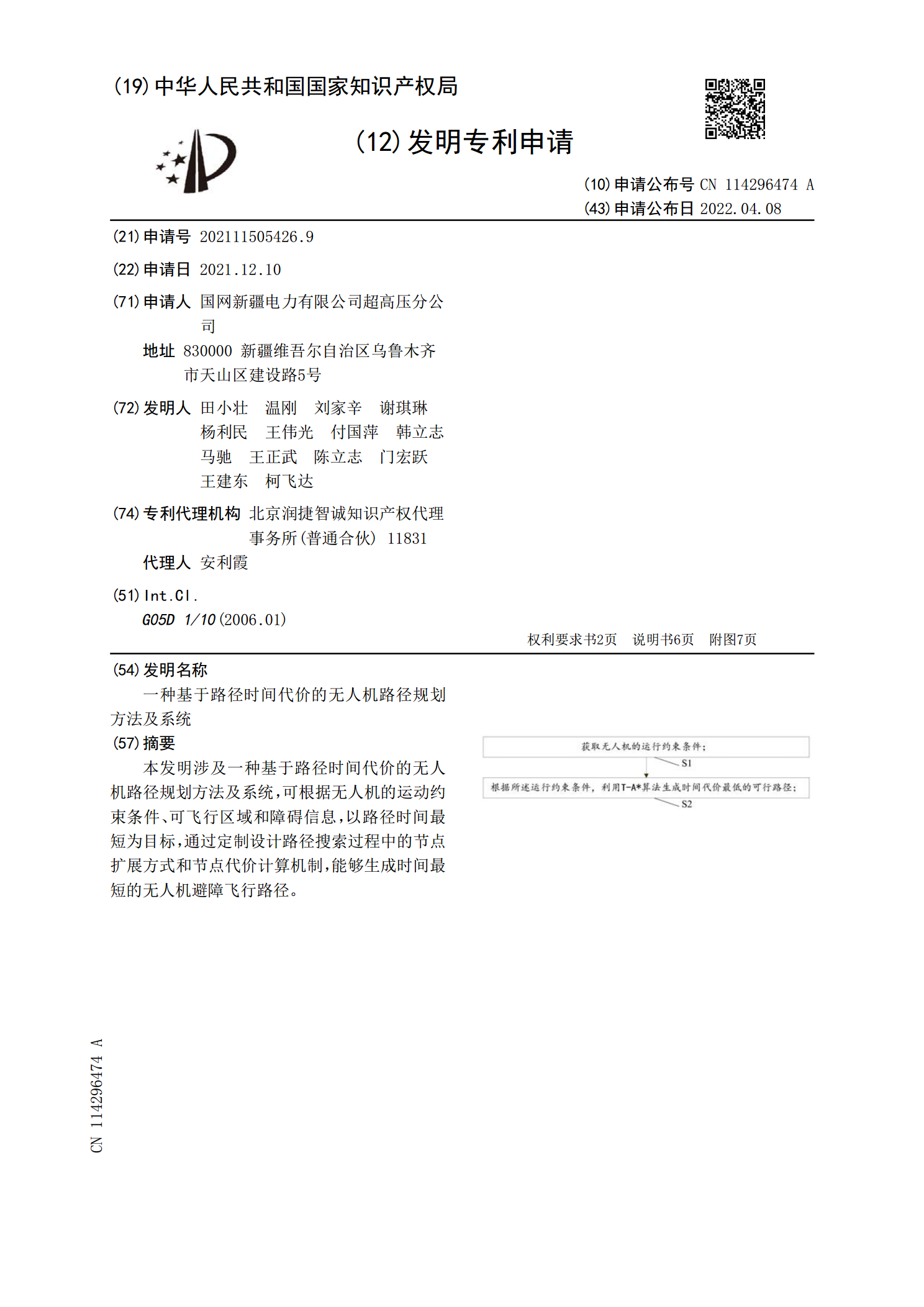
本发明涉及一种基于路径时间代价的无人机路径规划方法及系统,可根据无人机的运动约束条件、可飞行区域和障碍信息,以路径时间最短为目标,通过定制设计路径搜索过程中的节点扩展方式和节点代价计算机制,能够生成时间最短的无人机避障飞行路径。

基于动态规划方法的最优消费路径.docx
基于动态规划方法的最优消费路径1.引言生活中,每个人的需求和收入情况都不同,因此如何在自己的经济能力范围内合理地规划消费是一项非常重要的任务。最优消费路径是指在保证满足需求的前提下,选择合适的消费方案以达到最大化消费满足度的方法。动态规划方法是一种常用的解决最优化问题的算法,本文将以最优消费路径为例,介绍动态规划方法的基本原理及其应用。2.最优消费路径的问题定义假设有n种商品可以供顾客消费,每种商品都有一个价格和一个满足需求的程度,定义价格为ci,满足需求的程度为wi。且顾客的收入是有限的,即为M元。顾客
一种基于人工鱼群的无人机路径规划方法.pdf
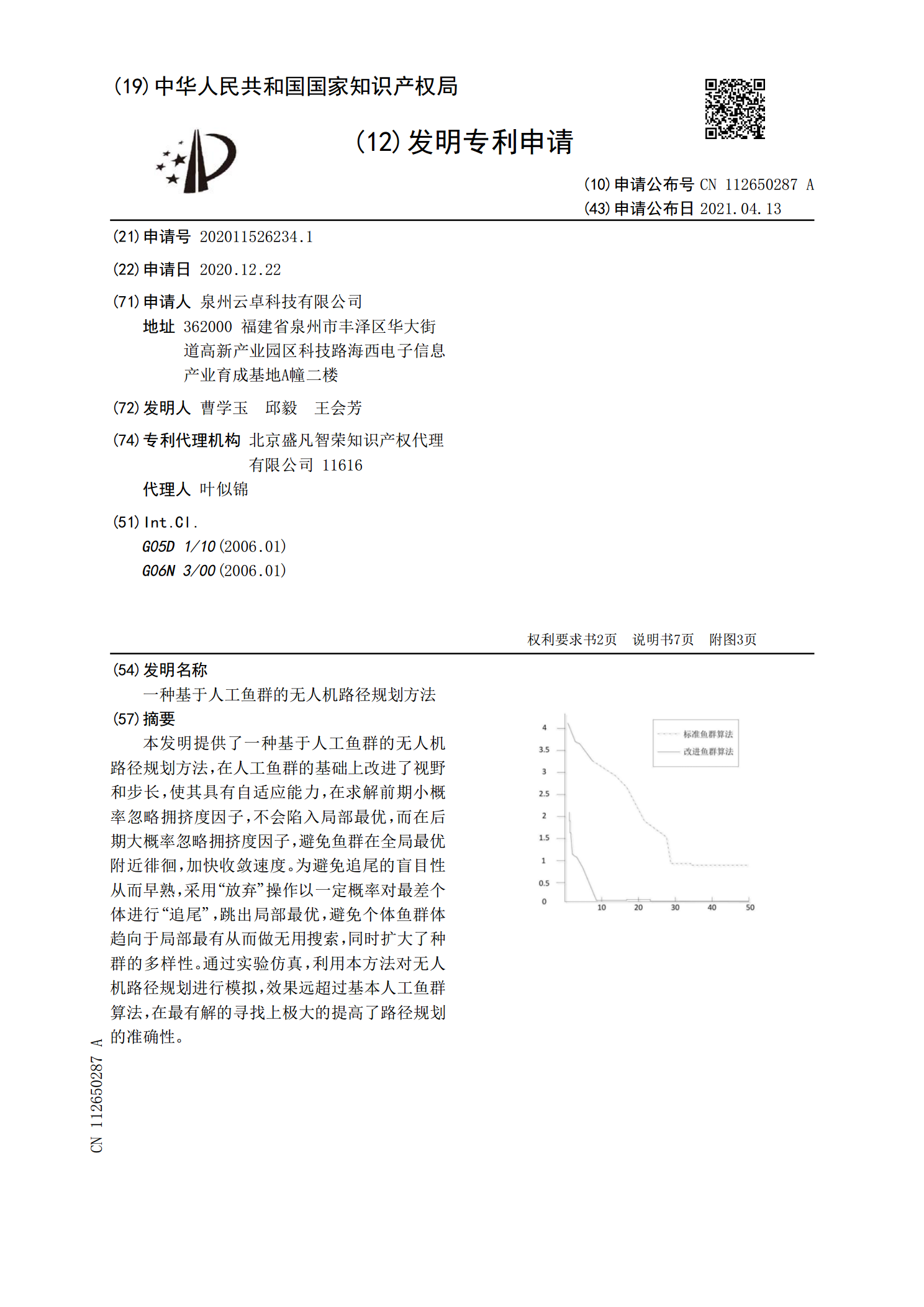
本发明提供了一种基于人工鱼群的无人机路径规划方法,在人工鱼群的基础上改进了视野和步长,使其具有自适应能力,在求解前期小概率忽略拥挤度因子,不会陷入局部最优,而在后期大概率忽略拥挤度因子,避免鱼群在全局最优附近徘徊,加快收敛速度。为避免追尾的盲目性从而早熟,采用“放弃”操作以一定概率对最差个体进行“追尾”,跳出局部最优,避免个体鱼群体趋向于局部最有从而做无用搜索,同时扩大了种群的多样性。通过实验仿真,利用本方法对无人机路径规划进行模拟,效果远超过基本人工鱼群算法,在最有解的寻找上极大的提高了路径规划的准确性

一种基于群体智能优化的无人机路径规划方法.pdf
本发明涉及一种路径优化的技术领域,公开了一种基于群体智能优化的无人机路径规划方法,包括:建立无人机路径规划问题的有向图以及形式化表示;确定无人机路径规划问题的约束条件;确定无人机路径规划问题的多目标函数;利用Zoutendijk法对多目标函数进行求解,得到无人机的规划路径。本发明实现了无人机路径规划。