
多功能机器手.pdf

星菱****23


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多功能机器手.pdf
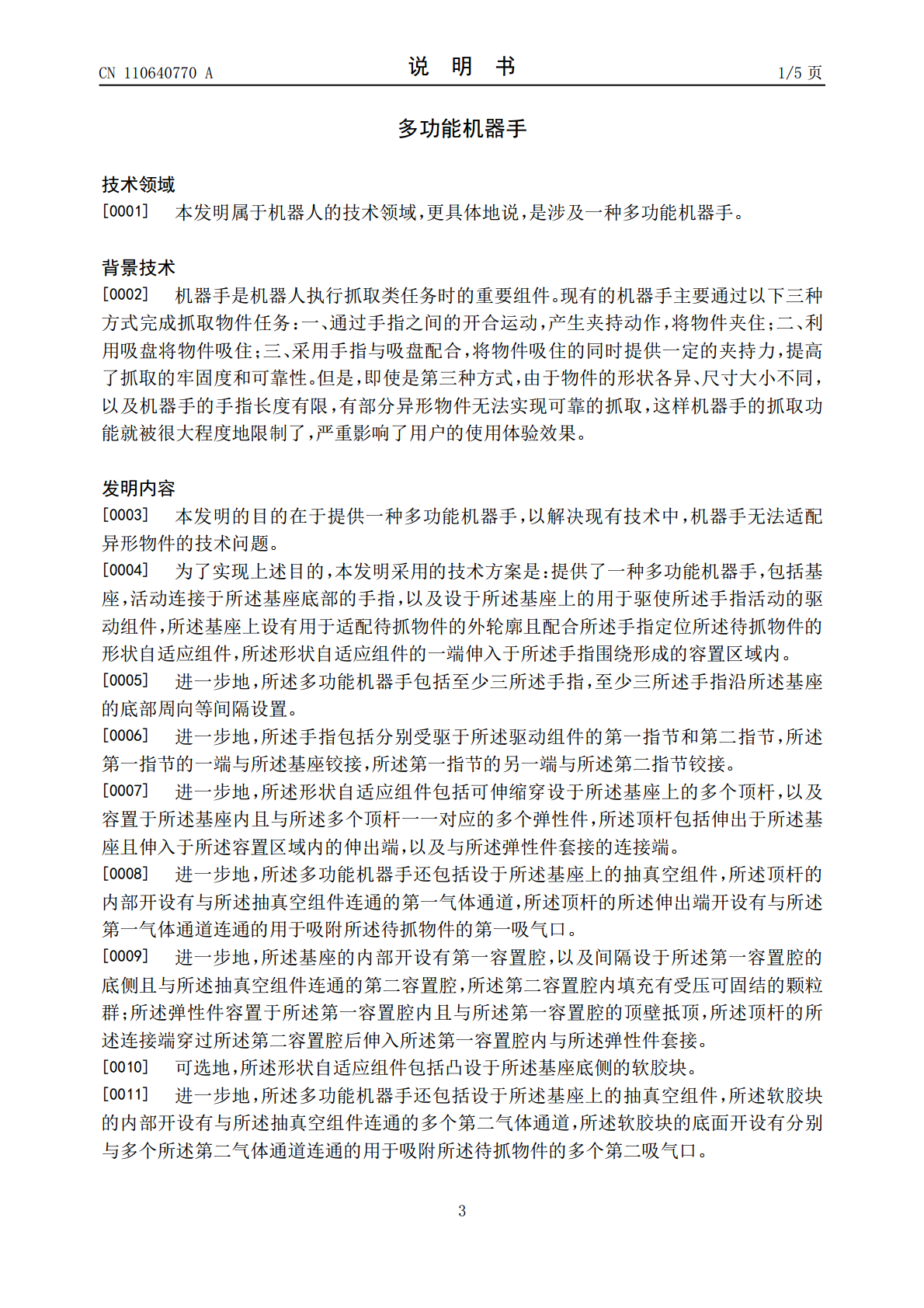
本发明提供了一种多功能机器手,包括基座,活动连接于基座底部的手指,以及设于基座上的用于驱使手指活动的驱动组件,基座上设有用于适配待抓物件的外轮廓且配合手指定位待抓物件的形状自适应组件,形状自适应组件的一端伸入于手指围绕形成的容置区域内。本发明采用了形状自适应组件与手指配合,当抓取物件时,通过形状自适应组件与待抓物件抵压,使得形状自适应组件的底侧外轮廓与待抓物件的顶部外轮廓相适配,进而增大了形状自适应组件与待抓物体表面的接触面积,增加了两者之间的摩擦力,可将待抓物件更好地定位在基座上,从而有效地解决了机器手
一种多功能机器手作业设备.pdf
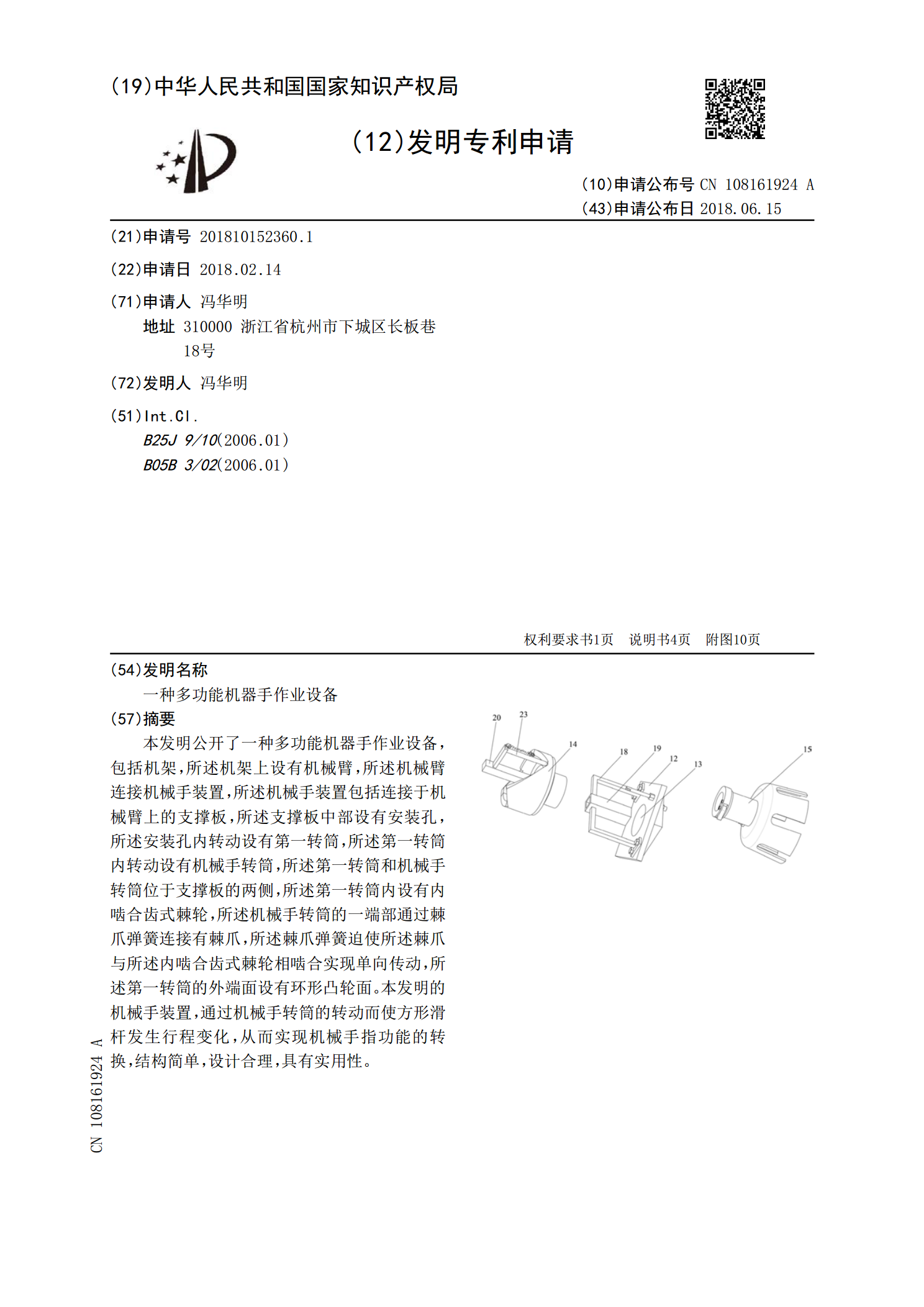
本发明公开了一种多功能机器手作业设备,包括机架,所述机架上设有机械臂,所述机械臂连接机械手装置,所述机械手装置包括连接于机械臂上的支撑板,所述支撑板中部设有安装孔,所述安装孔内转动设有第一转筒,所述第一转筒内转动设有机械手转筒,所述第一转筒和机械手转筒位于支撑板的两侧,所述第一转筒内设有内啮合齿式棘轮,所述机械手转筒的一端部通过棘爪弹簧连接有棘爪,所述棘爪弹簧迫使所述棘爪与所述内啮合齿式棘轮相啮合实现单向传动,所述第一转筒的外端面设有环形凸轮面。本发明的机械手装置,通过机械手转筒的转动而使方形滑杆发生行程

一种多功能工业机器人机械手.pdf
本发明公开了一种多功能工业机器人机械手,包括下拼接板、固定块、第一转动电机、第二转动电机和V形块,所述下拼接板顶部焊接有固定块,所述固定块顶部开设有限位槽且限位槽内套设有插块,所述插块顶部连接有安装板,所述安装板顶部一端通过安装座安装有第一转动电机,所述安装板顶部另一端通过预留槽安装有水冷排,所述第一转动电机的动力输出端连接有机械手转动臂,所述机械手转动臂端部一侧焊接有转槽。本发明机械手能在夹持较重物体或夹持较轻物体的情景下进行使用,可以进行区分切换,机械手在拆卸时较为简单,机械手在切换时的稳定效果佳,转
一种园林用环保多功能机器手作业设备.pdf
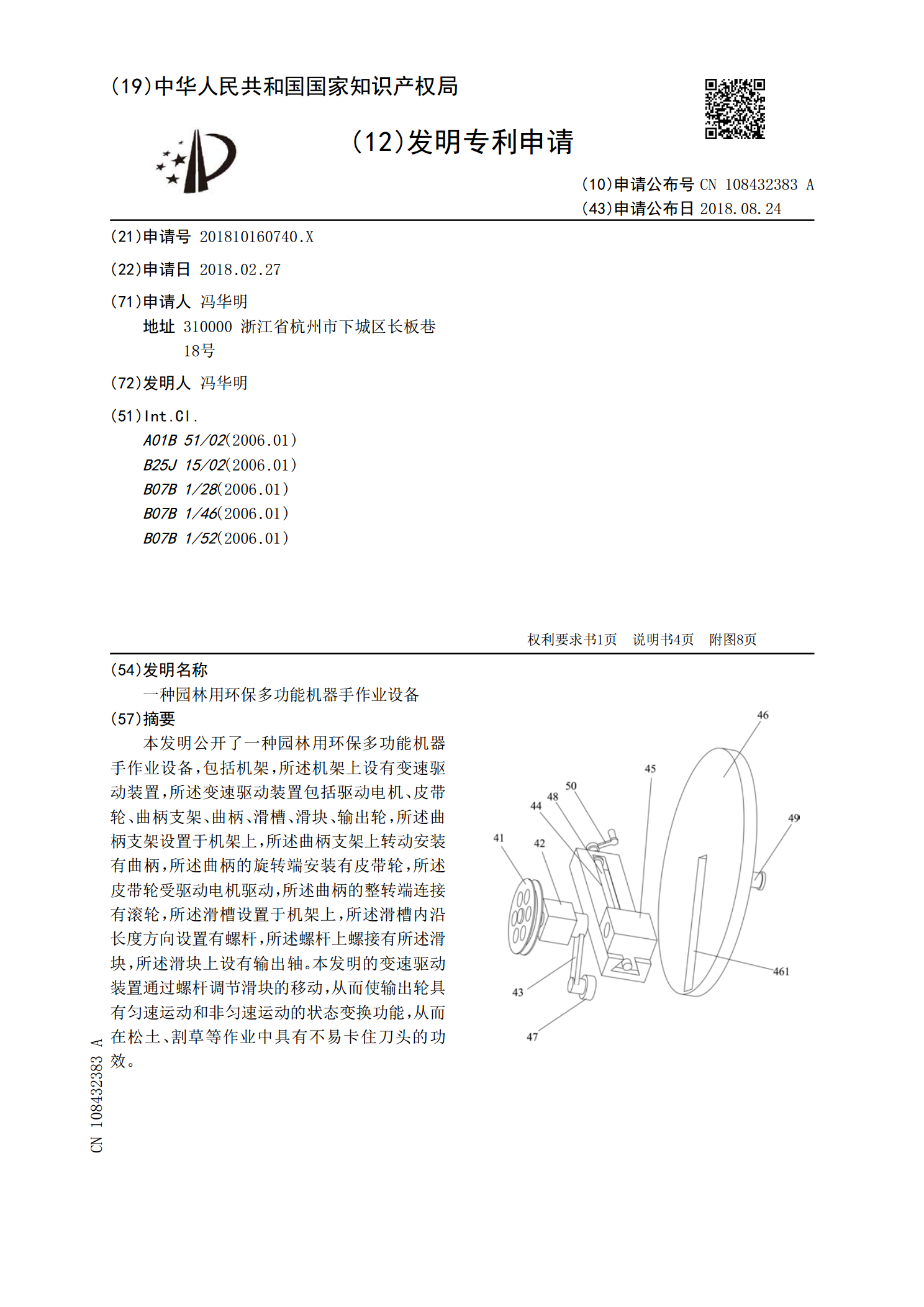
本发明公开了一种园林用环保多功能机器手作业设备,包括机架,所述机架上设有变速驱动装置,所述变速驱动装置包括驱动电机、皮带轮、曲柄支架、曲柄、滑槽、滑块、输出轮,所述曲柄支架设置于机架上,所述曲柄支架上转动安装有曲柄,所述曲柄的旋转端安装有皮带轮,所述皮带轮受驱动电机驱动,所述曲柄的整转端连接有滚轮,所述滑槽设置于机架上,所述滑槽内沿长度方向设置有螺杆,所述螺杆上螺接有所述滑块,所述滑块上设有输出轴。本发明的变速驱动装置通过螺杆调节滑块的移动,从而使输出轮具有匀速运动和非匀速运动的状态变换功能,从而在松土、

多功能穿线机器.pdf
本发明公开了多功能穿线机器,包括底座,所述底座的上端固定连接有支撑柱,所述支撑柱的上端设置有转动外壳,所述转动外壳与支撑柱通过转轴转动连接,所述转动外壳的内部设置有对合齿轮,所述对合齿轮与支撑柱固定连接,所述转动外壳的外侧设置有穿针杆,所述穿针杆的一侧设置有旋转把手,所述穿针杆的表面开设有凹槽;通过设计的穿线机器转动外壳和三个不同规格的穿针杆,在使用穿线机器可以根据需求旋转转动外壳调节穿针杆的位置使用适合的穿针杆,在使用穿线机器的时候更加方便。