
差分式轮速传感器信号激励系统.pdf

听云****君哇

1/8

2/8

3/8
4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

差分式轮速传感器信号激励系统.pdf
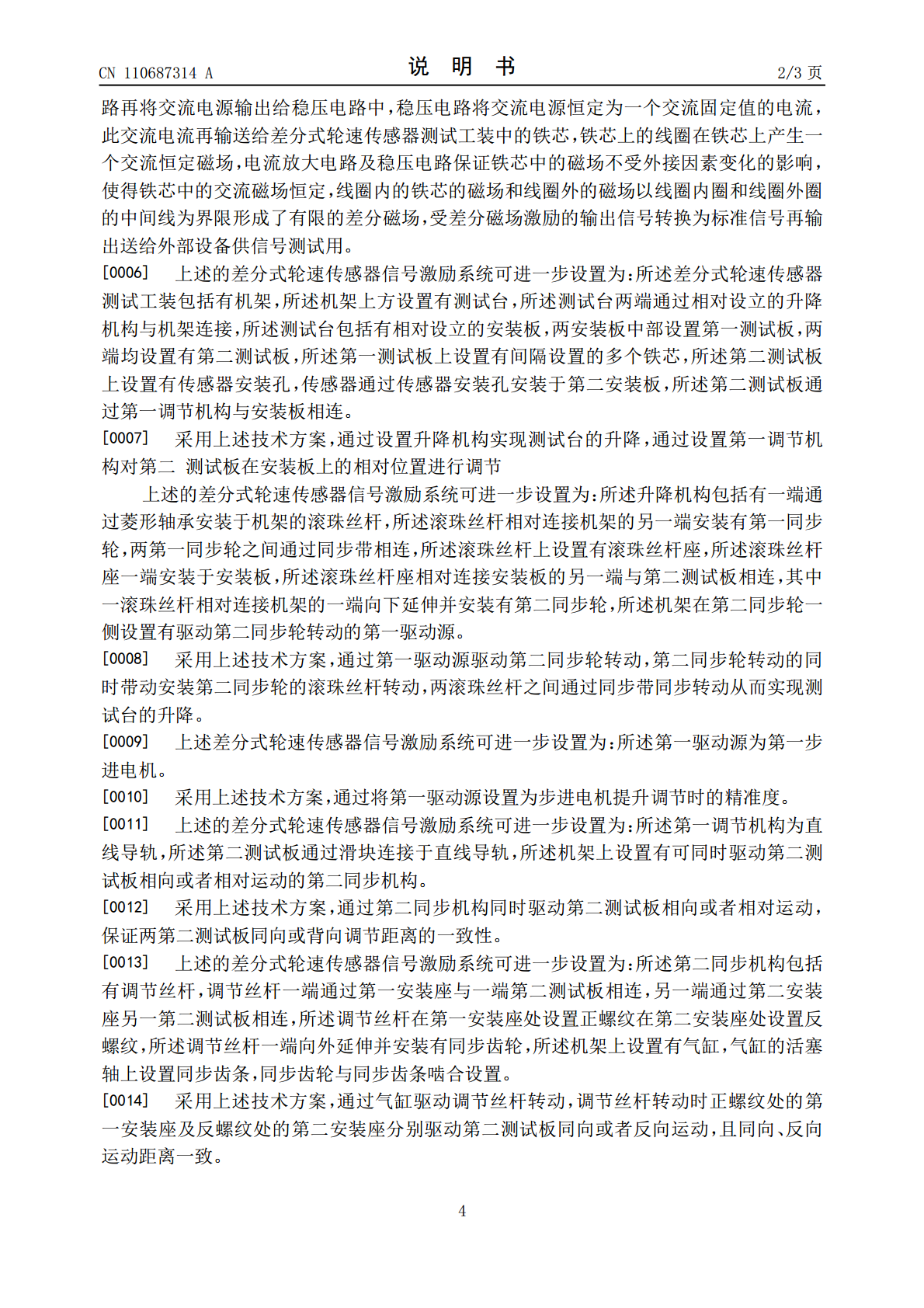
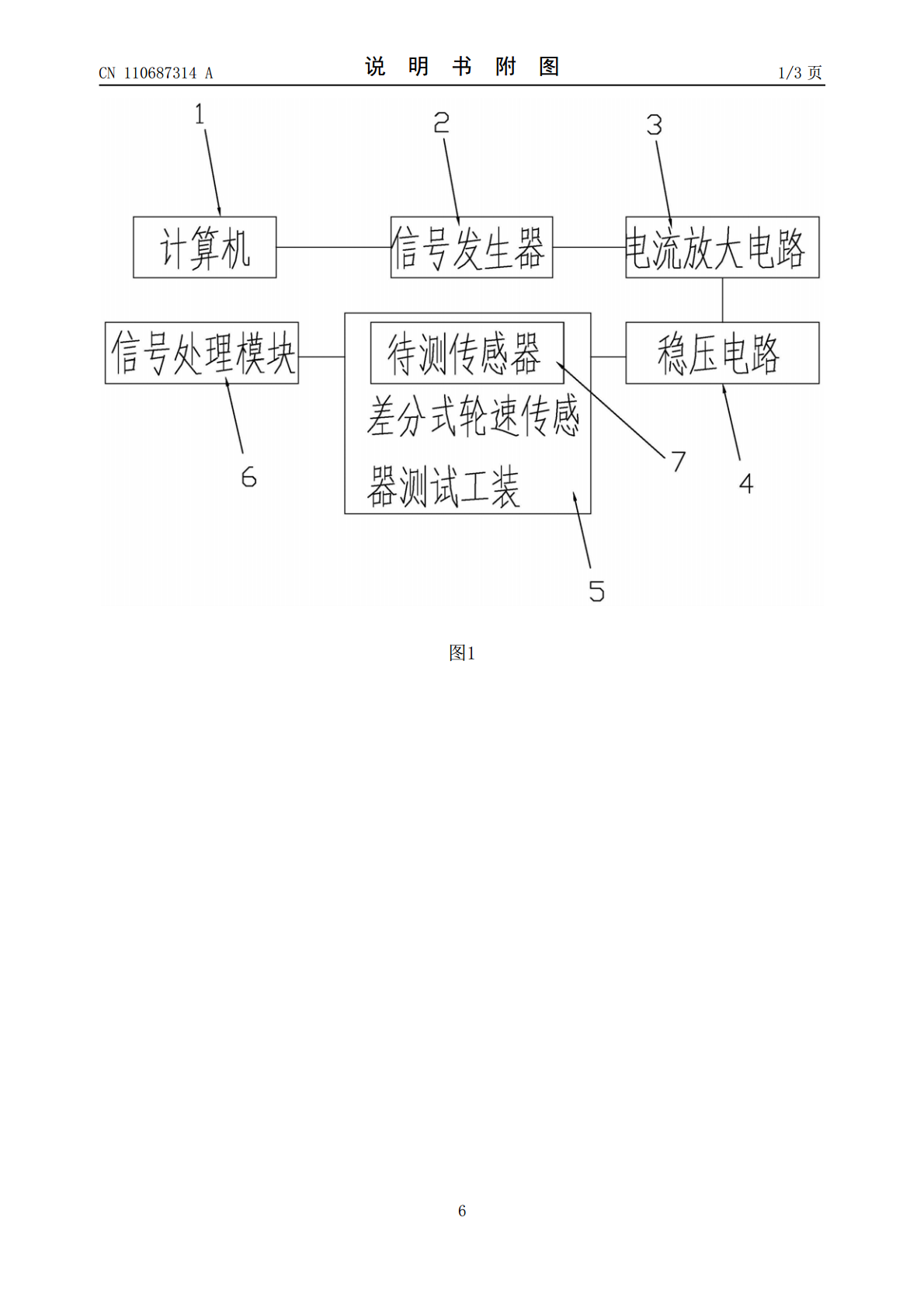
本发明涉及差分式轮速传感器信号激励系统,包括计算机、信号发生器,还包括有电流放大电路、稳压电路、差分式轮速传感器测试工装、信号处理模块,计算机通过串口连接信号发生器,信号发生器输出端连接到电流放大电路的输入端,电流放大电路的输出端连接到稳压电路的输入端,稳压电路的输出端连接到差分式轮速传感器测试工装的输入端,待测传感器安装在差分式轮速传感器测试工装上,待测传感器输出信号至信号处理模块的输入,本发明的有益效果为:本发明提供的差分式轮速传感器信号激励系统不仅结构简单且差分式轮速传感器测试工装的测试台可上下、左

差分式轮速传感器测试工装.pdf
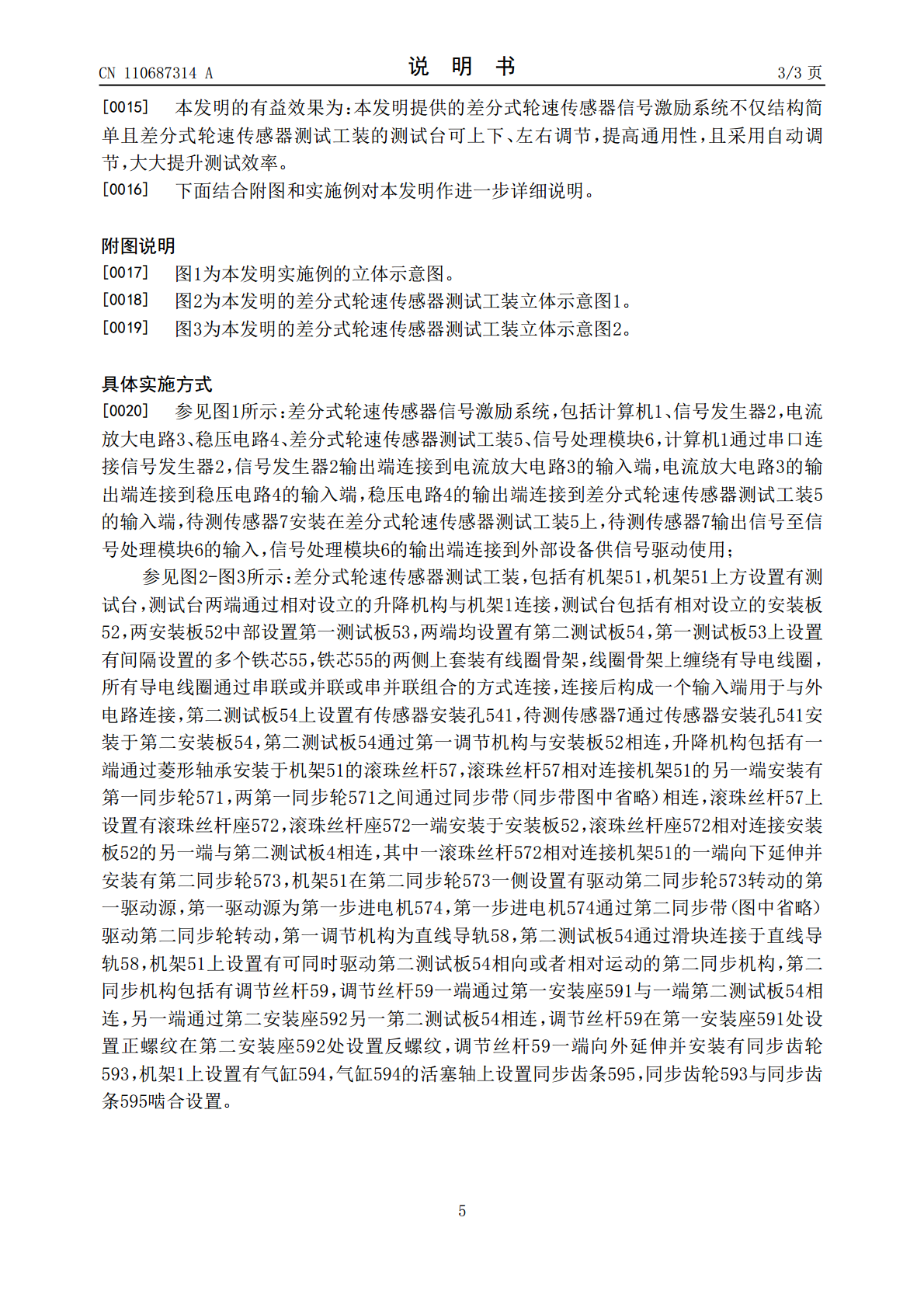
本发明涉及差分式轮速传感器测试工装,包括有机架,机架上方设置有测试台,测试台两端通过相对设立的升降机构与机架连接,测试台包括有相对设立的安装板,两安装板中部设置第一测试板,两端均设置有第二测试板,第一测试板上设置有间隔设置的多个铁芯,第二测试板上设置有传感器安装孔,传感器通过传感器安装孔安装于第二安装板,第二测试板通过第一调节机构与安装板相连,本发明的有益效果为:成本低、精度高、单次测试的传感器数目多,效率高,且同步调节,调节精度高。
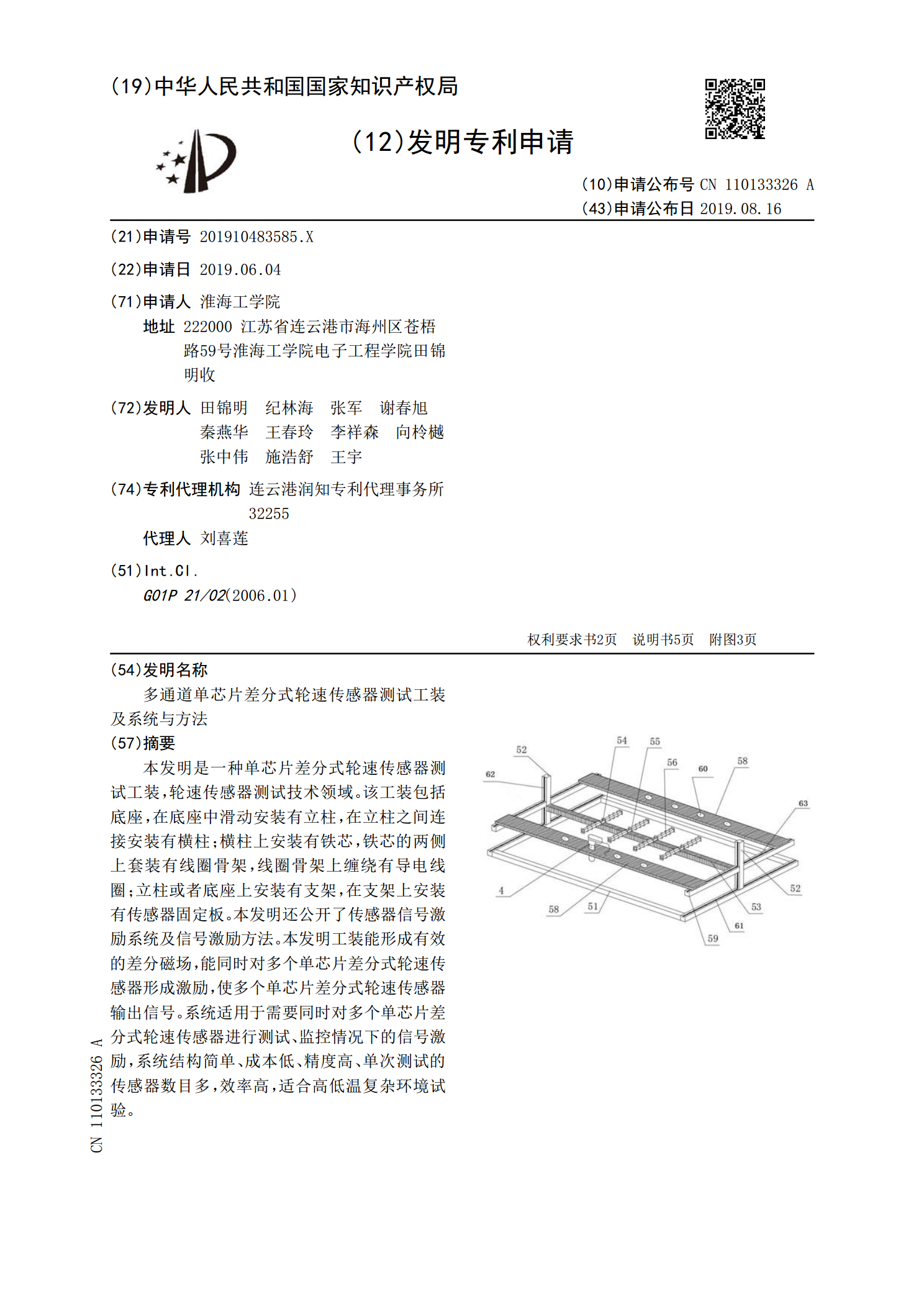
多通道单芯片差分式轮速传感器测试工装及系统与方法.pdf
本发明是一种单芯片差分式轮速传感器测试工装,轮速传感器测试技术领域。该工装包括底座,在底座中滑动安装有立柱,在立柱之间连接安装有横柱;横柱上安装有铁芯,铁芯的两侧上套装有线圈骨架,线圈骨架上缠绕有导电线圈;立柱或者底座上安装有支架,在支架上安装有传感器固定板。本发明还公开了传感器信号激励系统及信号激励方法。本发明工装能形成有效的差分磁场,能同时对多个单芯片差分式轮速传感器形成激励,使多个单芯片差分式轮速传感器输出信号。系统适用于需要同时对多个单芯片差分式轮速传感器进行测试、监控情况下的信号激励,系统结构简

轮速传感器的信号处理装置.pdf
本发明涉及一种轮速传感器的信号处理装置,其对输入至轮速传感器的电流进行双重监测,该装置防止过电流被供给到轮速传感器来监测输入至轮速传感器的电流。本发明的轮速传感器的信号处理装置包括接收轮速传感器的检测信号的传感器输入端和判断信号是否正常的正常判断块。
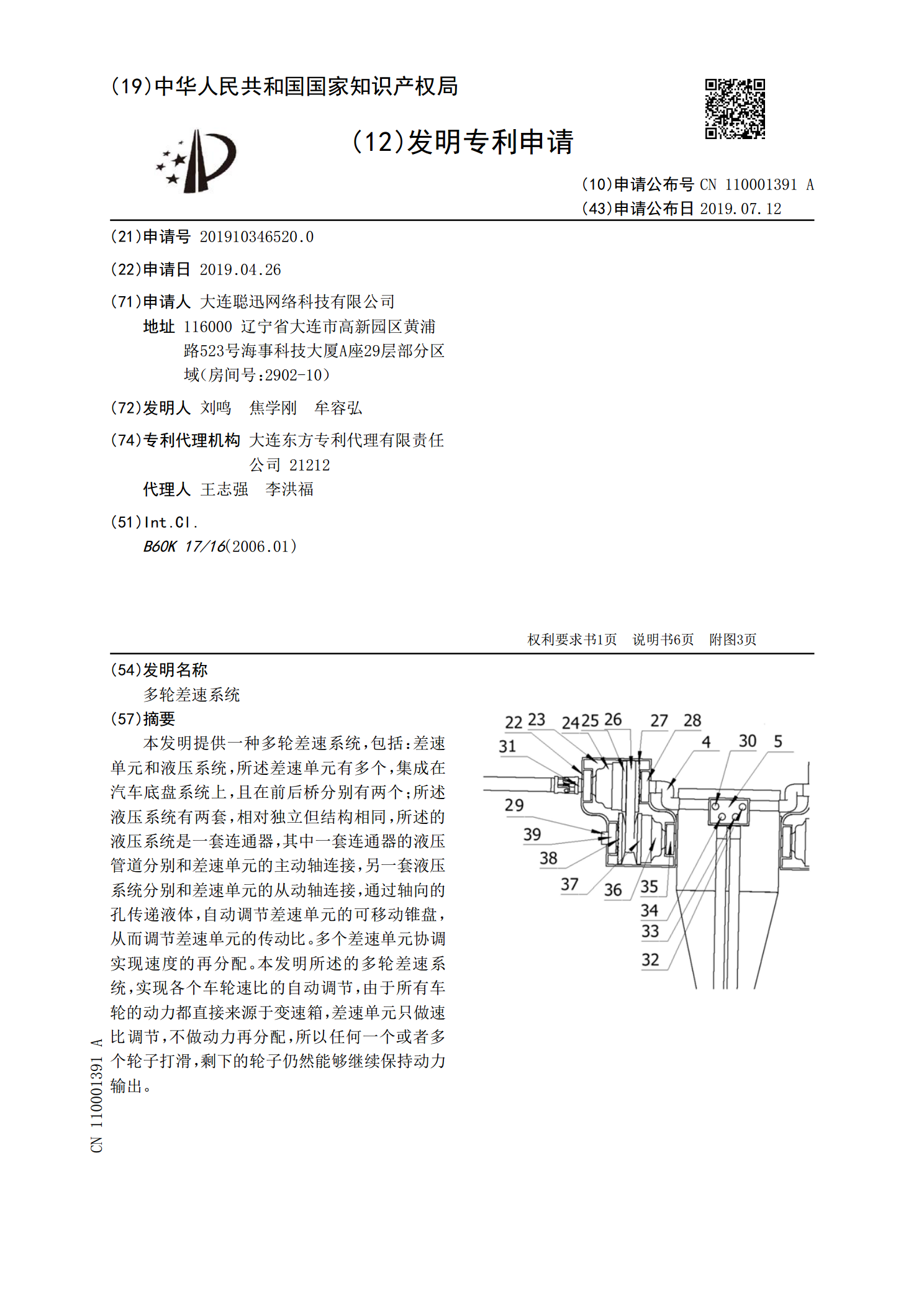
多轮差速系统.pdf
本发明提供一种多轮差速系统,包括:差速单元和液压系统,所述差速单元有多个,集成在汽车底盘系统上,且在前后桥分别有两个;所述液压系统有两套,相对独立但结构相同,所述的液压系统是一套连通器,其中一套连通器的液压管道分别和差速单元的主动轴连接,另一套液压系统分别和差速单元的从动轴连接,通过轴向的孔传递液体,自动调节差速单元的可移动锥盘,从而调节差速单元的传动比。多个差速单元协调实现速度的再分配。本发明所述的多轮差速系统,实现各个车轮速比的自动调节,由于所有车轮的动力都直接来源于变速箱,差速单元只做速比调节,不做