
基于双目视觉的IPT模拟训练手势识别方法.pdf

书生****66

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目视觉的IPT模拟训练手势识别方法.pdf
本发明公开一种基于双目视觉的IPT模拟训练手势识别方法,根据VR应用的特点改进其交互方式,分别在手势分割、手势跟踪及手势识别三个方面进行创新性改进;手势分割时通过背景建模、目标运动趋势估计等方法来补偿由于运动模糊产生的前景分割图像中目标丢失现象,手势跟踪时利用色度信息和深度信息的组合,通过轮廓拟合实现在操作飞行模拟器时的运动手势的跟踪,手势识别时提出扩展Haar‑like特征和改进的Adaboost方法并用于手形分类,并定义“状态区”,获得了良好的动态手势识别率,提高了操作时的使用体验,使操作人员能够精准
基于视觉的手势识别方法.pdf
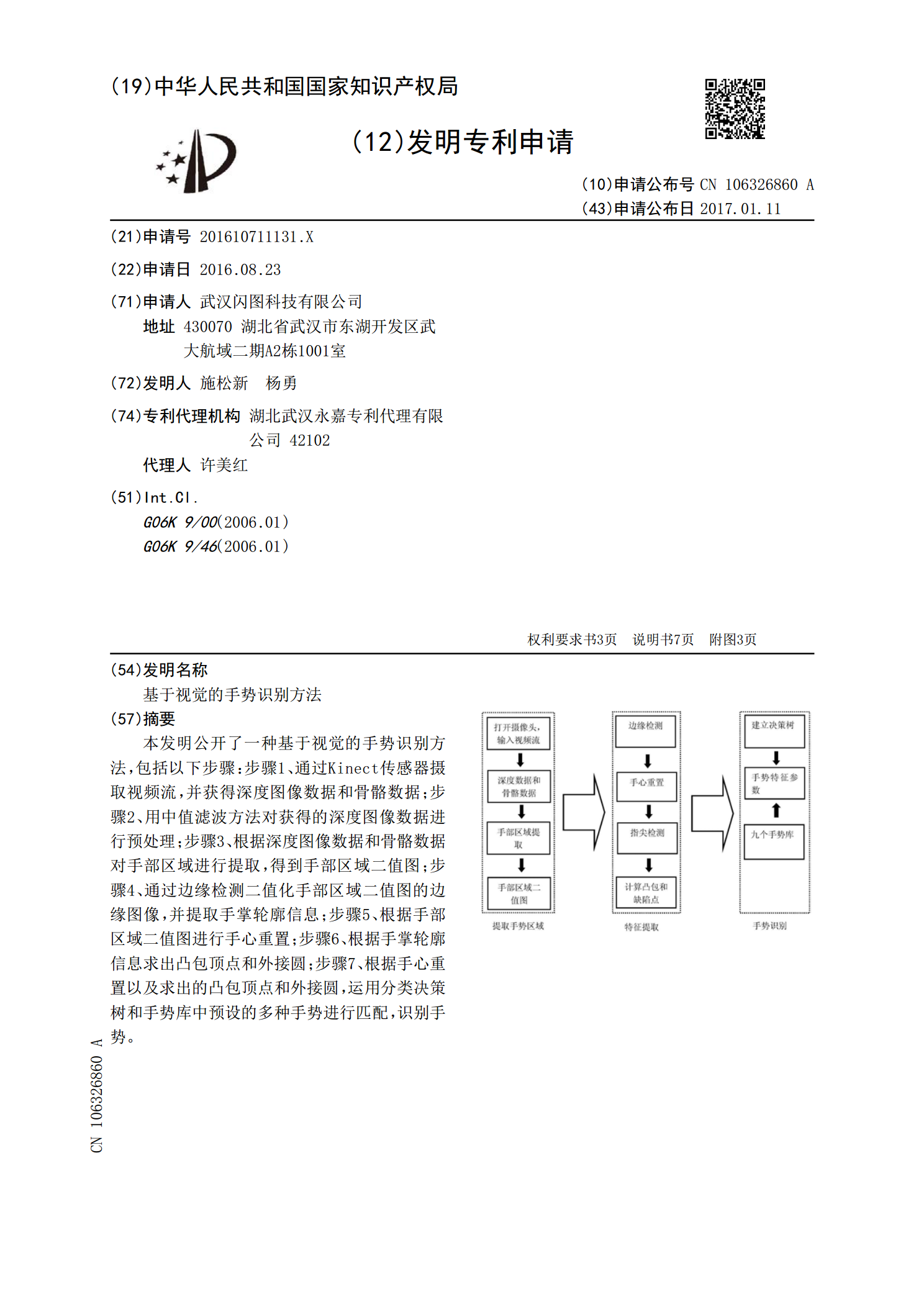
本发明公开了一种基于视觉的手势识别方法,包括以下步骤:步骤1、通过Kinect传感器摄取视频流,并获得深度图像数据和骨骼数据;步骤2、用中值滤波方法对获得的深度图像数据进行预处理;步骤3、根据深度图像数据和骨骼数据对手部区域进行提取,得到手部区域二值图;步骤4、通过边缘检测二值化手部区域二值图的边缘图像,并提取手掌轮廓信息;步骤5、根据手部区域二值图进行手心重置;步骤6、根据手掌轮廓信息求出凸包顶点和外接圆;步骤7、根据手心重置以及求出的凸包顶点和外接圆,运用分类决策树和手势库中预设的多种手势进行匹配,识

基于视觉的手势识别方法研究.pptx
,CONTENTS01.02.手势识别的定义和意义手势识别技术的发展历程手势识别的应用场景手势识别的挑战与未来发展方向03.图像采集与预处理手部特征提取手势分类与识别实验结果与分析04.智能家居控制系统虚拟现实与增强现实应用医疗康复领域应用汽车人机交互系统应用05.深度学习在手势识别中的应用多模态融合的手势识别技术高精度实时手势识别技术手势识别技术的隐私保护与安全问题06.基于视觉的手势识别方法研究总结手势识别技术的未来发展趋势与展望感谢您的观看!

基于视觉的手势识别方法研究.docx
基于视觉的手势识别方法研究摘要现代人机交互技术中,手势识别技术被广泛应用于智能手机、智能家居、虚拟现实、游戏等领域。随着深度学习和计算机视觉技术的发展,基于视觉的手势识别方法已经取得了较大的突破。本文就基于视觉的手势识别方法进行了研究,首先介绍了手势识别技术的应用背景以及手势的定义和分类;然后详细介绍了基于视觉的手势识别技术的核心方法及其优缺点;最后对未来基于视觉的手势识别技术发展进行了展望。关键词:手势识别;视觉;计算机视觉;深度学习AbstractGesturerecognitiontechnolog

基于视觉的静态手势识别方法.pdf
本发明提供一种基于视觉的静态手势识别方法,其包括以下步骤:S1手势图像预处理,根据人体的肤色特征从环境中分割出手区域,然后通过图滤波及图像形态学操作得到手势轮廓;S2手势特征参数提取,提取了Hu不变矩特征,手势区域特征以及傅立叶描述子参数,组成特征向量;S3手势识别,使用多层感知器分类器,该分类器具有自组织和自学习能力,能有效的抗噪声和处理不完整模式以及具有模式推广能力。本发明的基于视觉的静态手势识别方法先进行预处理,根据人体的肤色特征将原始的手势图像二值化,提取的手势特征参数有三组,分别为H