
离岸风力涡轮机安装装置.pdf

一吃****福乾


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
离岸风力涡轮机安装装置.pdf
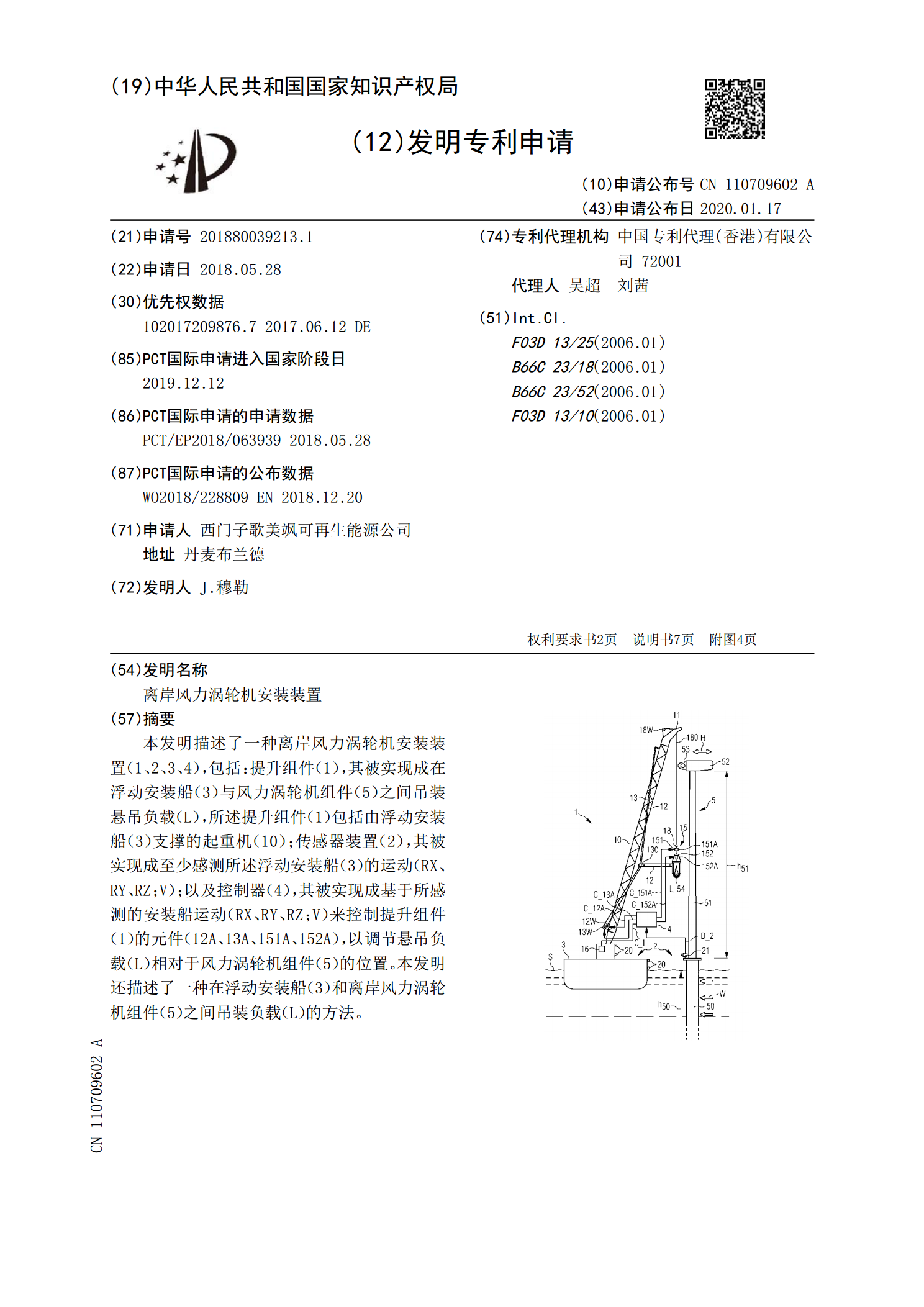
本发明描述了一种离岸风力涡轮机安装装置(1、2、3、4),包括:提升组件(1),其被实现成在浮动安装船(3)与风力涡轮机组件(5)之间吊装悬吊负载(L),所述提升组件(1)包括由浮动安装船(3)支撑的起重机(10);传感器装置(2),其被实现成至少感测所述浮动安装船(3)的运动(RX、RY、RZ;V);以及控制器(4),其被实现成基于所感测的安装船运动(RX、RY、RZ;V)来控制提升组件(1)的元件(12A、13A、151A、152A),以调节悬吊负载(L)相对于风力涡轮机组件(5)的位置。本发明还描述

拖曳离岸风力涡轮机的方法和装置.pdf
一种用于使漂浮式风力涡轮机(1)相对于水体移动的方法,所述漂浮式风力涡轮机(1)具有浮力本体,所述浮力本体在其上端处具有发动机舱,所述方法包括:使所述漂浮式风力涡轮机(1)漂浮在水体中;以及拖曳所述漂浮式风力涡轮机(1),同时保持所述浮力本体处于倾斜位置,由此保持所述发动机舱不接触水。因为所述风力涡轮机(1)保持处于倾斜位置,所以与其处于竖直位置的情况相比,它可被拖曳通过更浅的水域。
离岸安装具有维修平台的风力涡轮机的方法.pdf
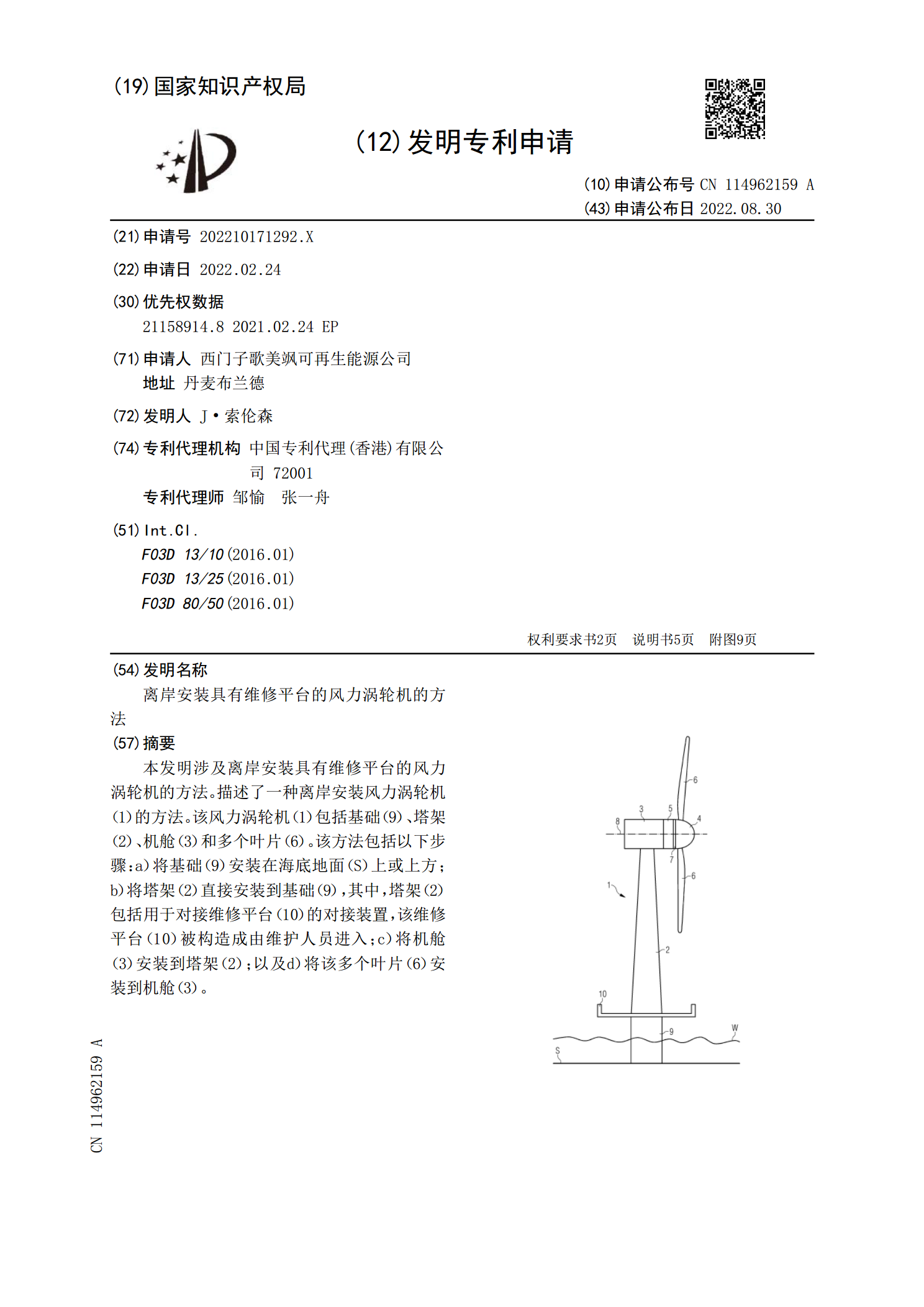
本发明涉及离岸安装具有维修平台的风力涡轮机的方法。描述了一种离岸安装风力涡轮机(1)的方法。该风力涡轮机(1)包括基础(9)、塔架(2)、机舱(3)和多个叶片(6)。该方法包括以下步骤:a)将基础(9)安装在海底地面(S)上或上方;b)将塔架(2)直接安装到基础(9),其中,塔架(2)包括用于对接维修平台(10)的对接装置,该维修平台(10)被构造成由维护人员进入;c)将机舱(3)安装到塔架(2);以及d)将该多个叶片(6)安装到机舱(3)。

安装离岸风力涡轮机的方法及其运输船.pdf
本发明涉及一种安装离岸风力涡轮机的方法及其运输船。在装载地点,通过使用设置在运输船上的提升装置将风力涡轮机的一部分相对运输船以垂直方向提升至运输位置。然后运输船从装载地点驶向安装地点。该运输船固定至位于安装地点的离岸底座。然后使用提升装置将风力涡轮机放下到离岸底座上面。最后,运输船脱离并驶离。本方法不需专门设计安装船使用起重机去安装离岸风力涡轮机,由此减少安装总费用。

在离岸地点竖立风力涡轮机的方法和在离岸地点竖立风力涡轮机的船只.pdf
本发明涉及在离岸地点竖立风力涡轮机的方法,所述方法包括以下步骤:将起重机第一吊臂安置在大致水平位置,将大致水平安置的细长风力涡轮机构件布置在所述第一吊臂上,将所述细长风力涡轮机构件远端部分与所述起重机第二吊臂连接,所述远端部分是当风力涡轮机被竖立时所述风力涡轮机构件的上部部分,且所述第二吊臂与所述第一吊臂的纵向范围成一定角度延伸,提升所述第一吊臂到大致竖直位置,在水平平面上调整所述细长风力涡轮机构件的位置,以达到构件预期竖立位置,以及使所述细长风力涡轮机构件的所述远端部分与所述起重机所述第二吊臂脱离。本发