
一种改善滚柱受力的行星滚柱丝杠副的滚柱.pdf

是丹****ni


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种改善滚柱受力的行星滚柱丝杠副的滚柱.pdf
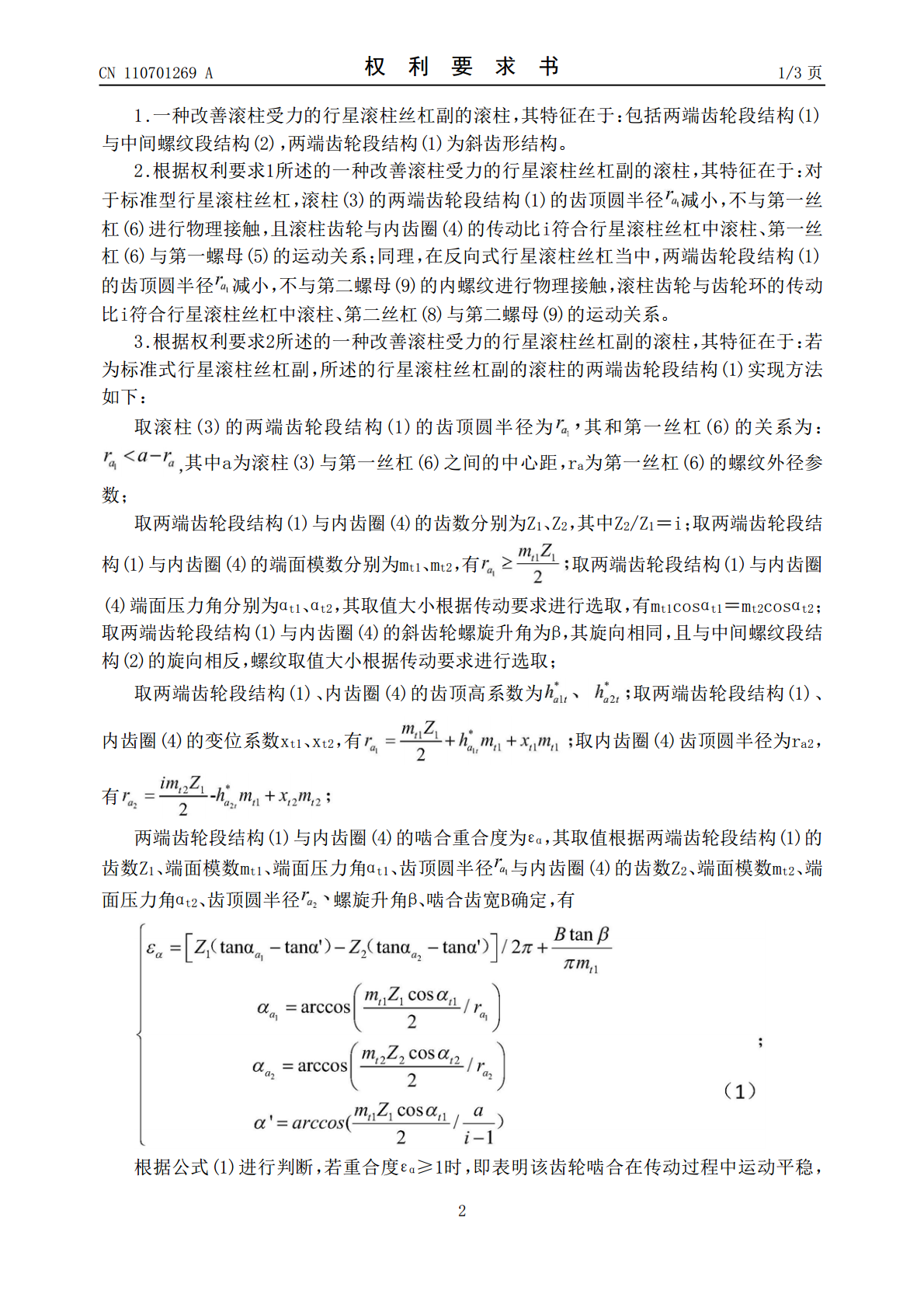
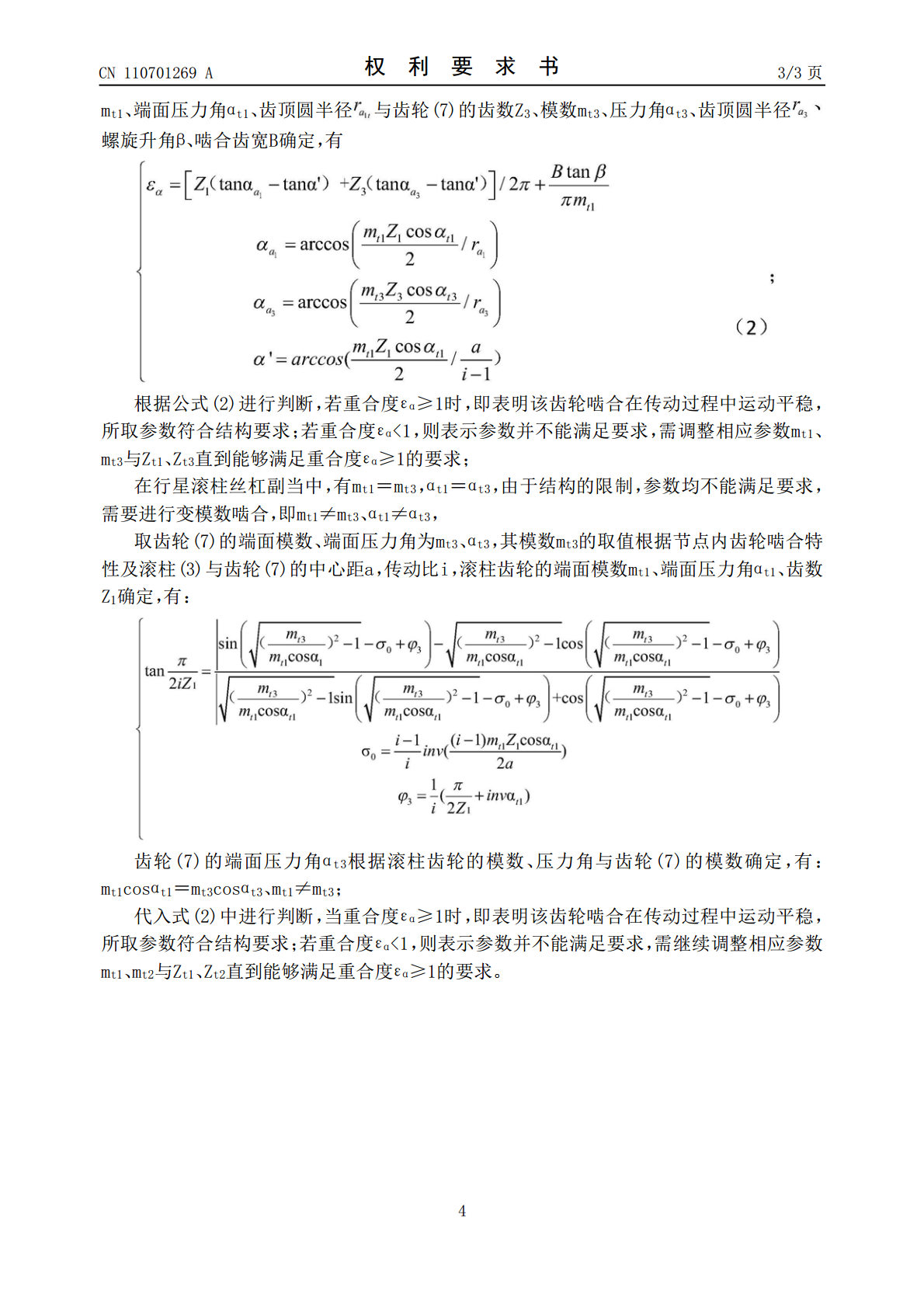
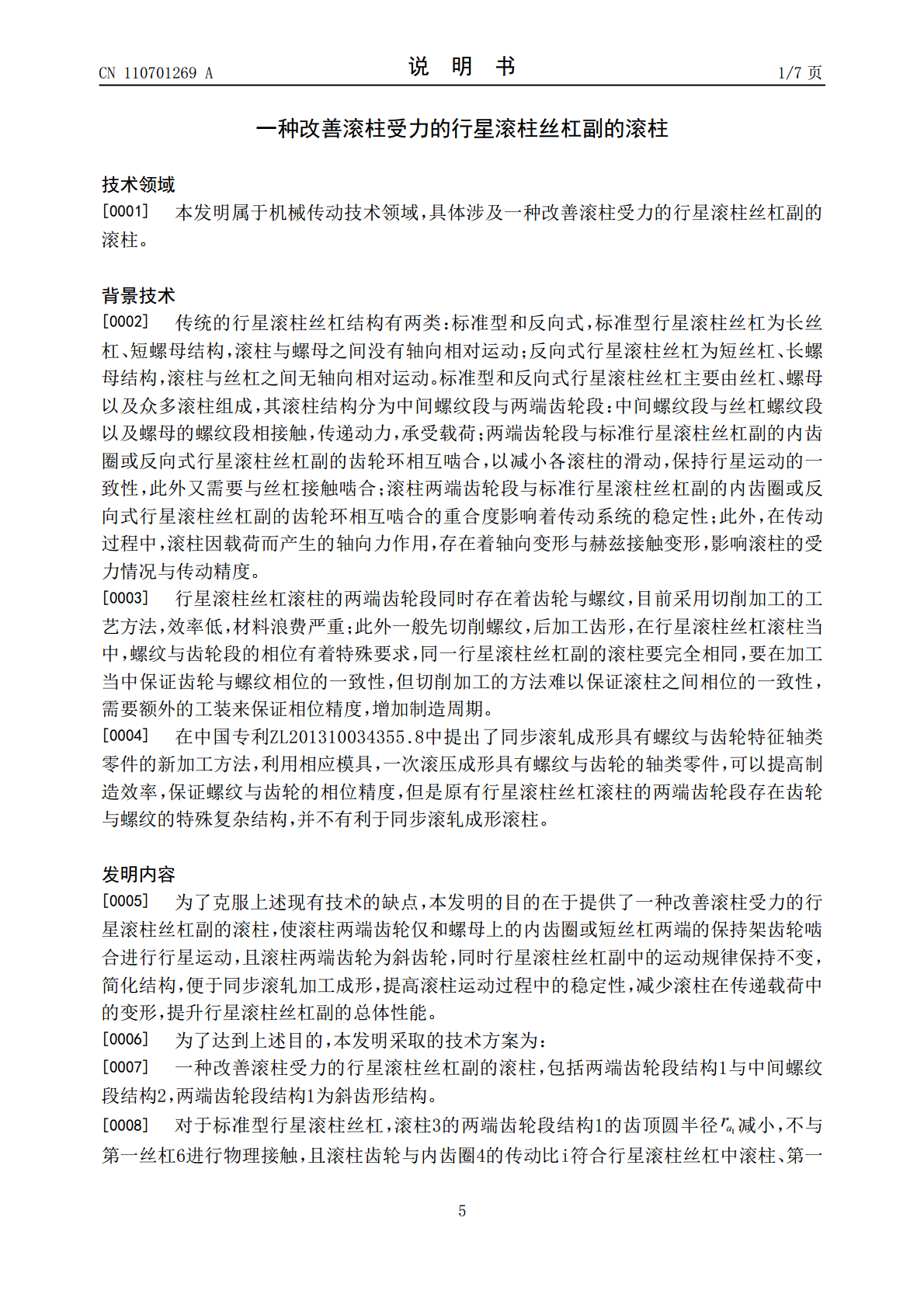
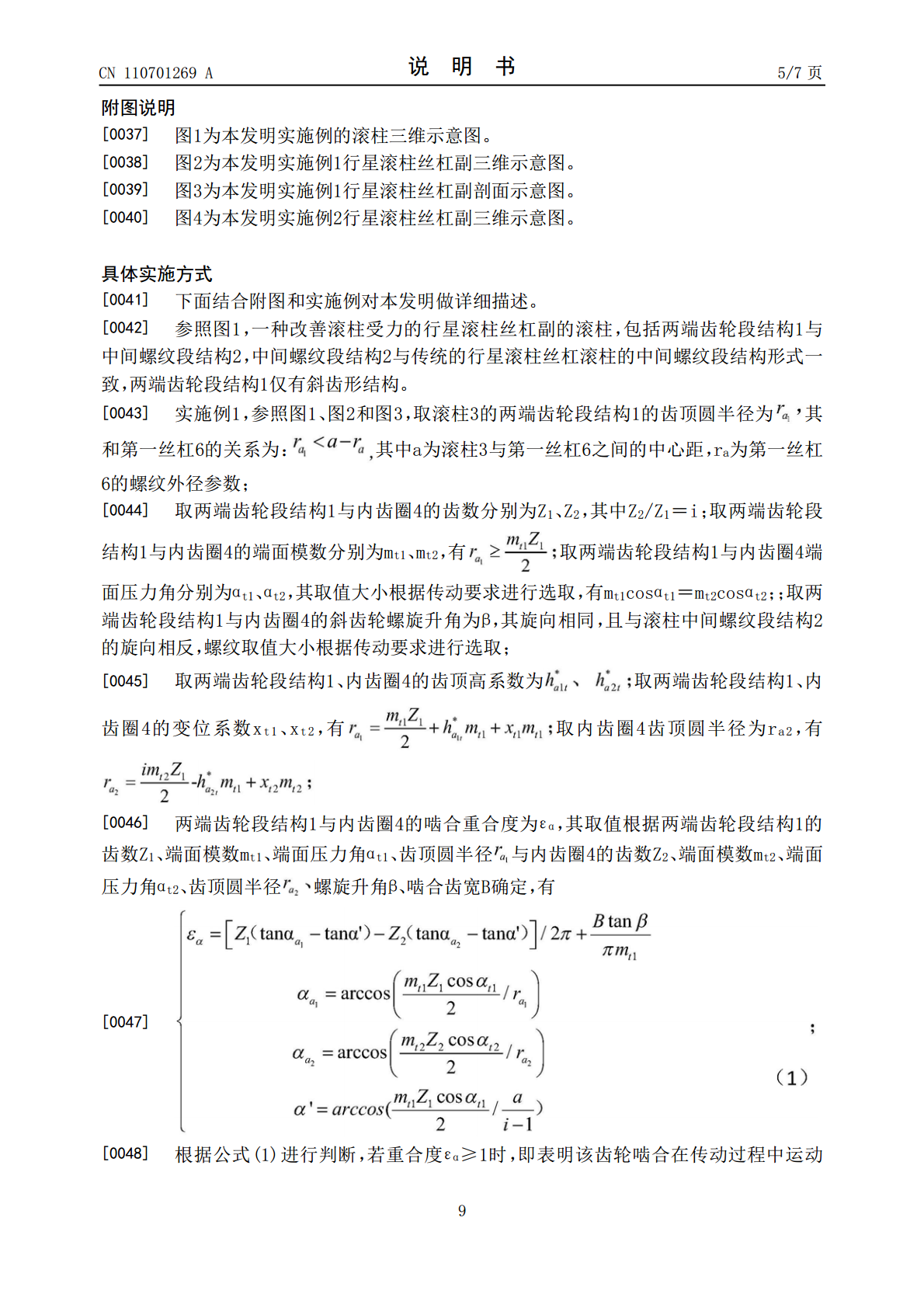
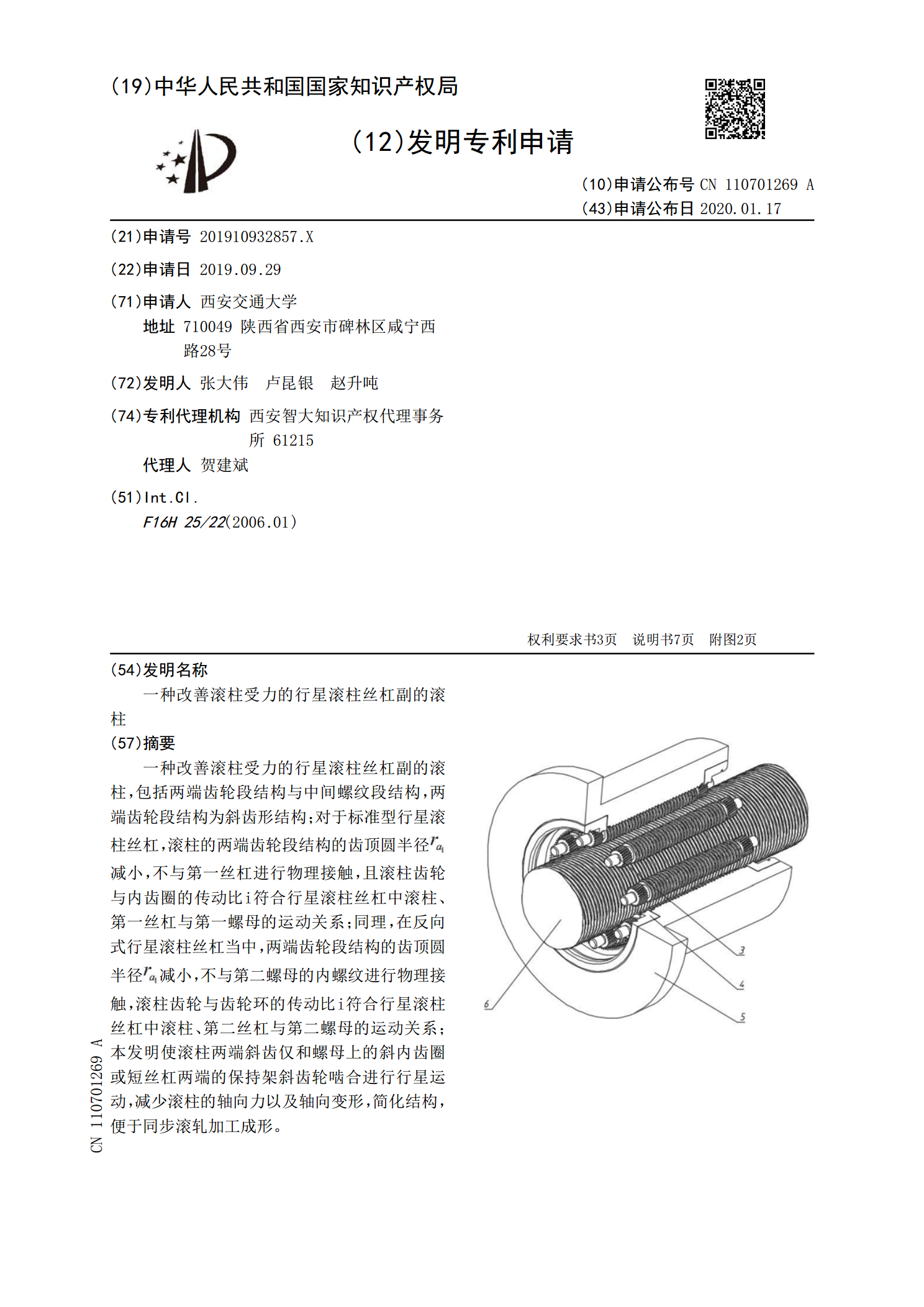
一种改善滚柱受力的行星滚柱丝杠副的滚柱,包括两端齿轮段结构与中间螺纹段结构,两端齿轮段结构为斜齿形结构;对于标准型行星滚柱丝杠,滚柱的两端齿轮段结构的齿顶圆半径

一种行星滚柱丝杠副的滚柱.pdf
一种行星滚柱丝杠副的滚柱,包括两端齿轮段结构与中间螺纹段结构,两端齿轮段结构为齿形结构,对于标准型行星滚柱丝杠,滚柱的两端齿轮段结构的齿顶圆半径r

行星滚柱丝杠副滚柱的设计方法与虚拟装配.docx
行星滚柱丝杠副滚柱的设计方法与虚拟装配行星滚柱丝杠副是一种常用的传动装置,广泛应用于机械领域。它由行星减速器和滚珠丝杠组成,具有结构简单、传动精度高、负载能力强等优点,在机床、机器人等自动化设备中发挥着重要的作用。本文将介绍行星滚柱丝杠副的设计方法和虚拟装配技术。首先,行星滚柱丝杠副的设计方法包括以下几个方面:确定传动比、计算副尺寸、确定滚柱数量、计算模块参数和选取材料。确定传动比是设计行星滚柱丝杠副的基础,它决定了螺旋机构的传动效果。传动比的确定需要考虑到工作负载和速度要求等因素。一般来说,传动比越大,

考虑滚柱弯曲的行星滚柱丝杠副载荷分布研究.docx
考虑滚柱弯曲的行星滚柱丝杠副载荷分布研究滚柱弯曲的行星滚柱丝杠副载荷分布研究摘要:行星滚柱丝杠副是一种高精度、高刚度的传动装置,广泛应用于机床、机器人等伺服系统中。然而,由于滚柱的弯曲,在实际应用中会引起载荷分布不均匀的问题,严重影响了传动装置的性能和寿命。本文针对滚柱弯曲问题进行了深入研究,主要包括滚柱弯曲的原理、影响因素、数学模型的建立以及载荷分布的仿真分析等内容。通过对滚柱弯曲的研究,可以为行星滚柱丝杠副的设计和优化提供理论指导。关键词:行星滚柱丝杠副,滚柱弯曲,载荷分布,数学模型,仿真分析一、引言

差分式行星滚柱丝杠副.pdf
本发明公开了一种差分式行星滚柱丝杠副,包括:丝杠轴,其包括螺纹部;螺母,套设在丝杠轴外,且其具有中空腔体,且该中空腔体沿轴向成形有内壁光滑的环壁区和设于环壁区的至少一个轴端的成形有螺纹区;至少两个滚柱,其相对于丝杠轴的中心轴线在径向上布置在丝杠轴与螺母之间;每个滚柱的外壁设有第一滚柱螺纹和设于第一滚柱螺纹的至少一个轴端的且与第一滚柱螺纹同轴分布的第二滚柱螺纹;第一滚柱螺纹与环壁区相对且用于与丝杠轴的螺纹部啮合,第一滚柱螺纹与环壁区不接触;第二滚柱螺纹用于与螺母的螺纹区啮合,且第二滚柱螺纹与丝杠轴的螺纹部不