
以单控制力矩陀螺和两飞轮实现卫星三轴稳定控制的方法.pdf

绮兰****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
以单控制力矩陀螺和两飞轮实现卫星三轴稳定控制的方法.pdf
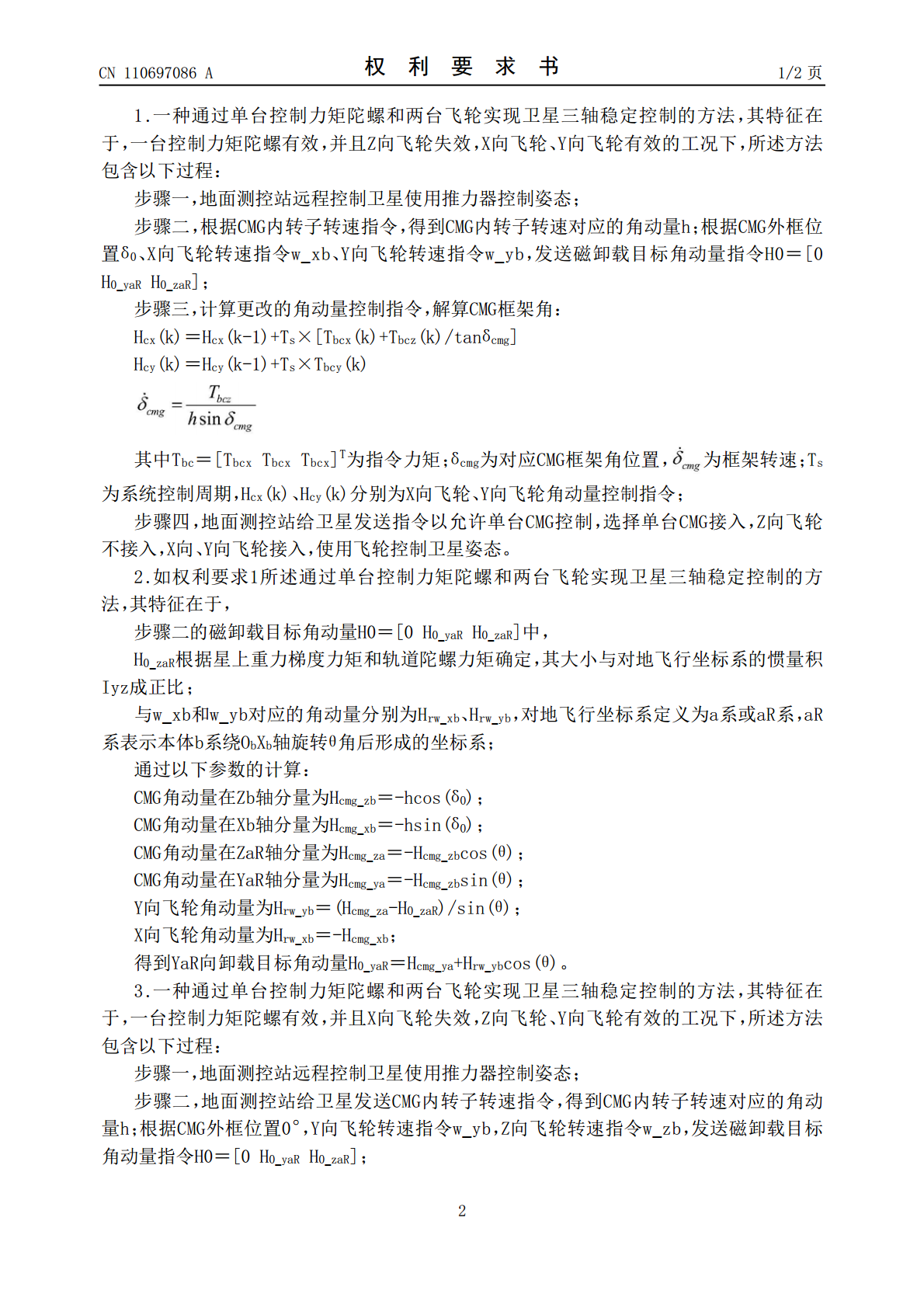
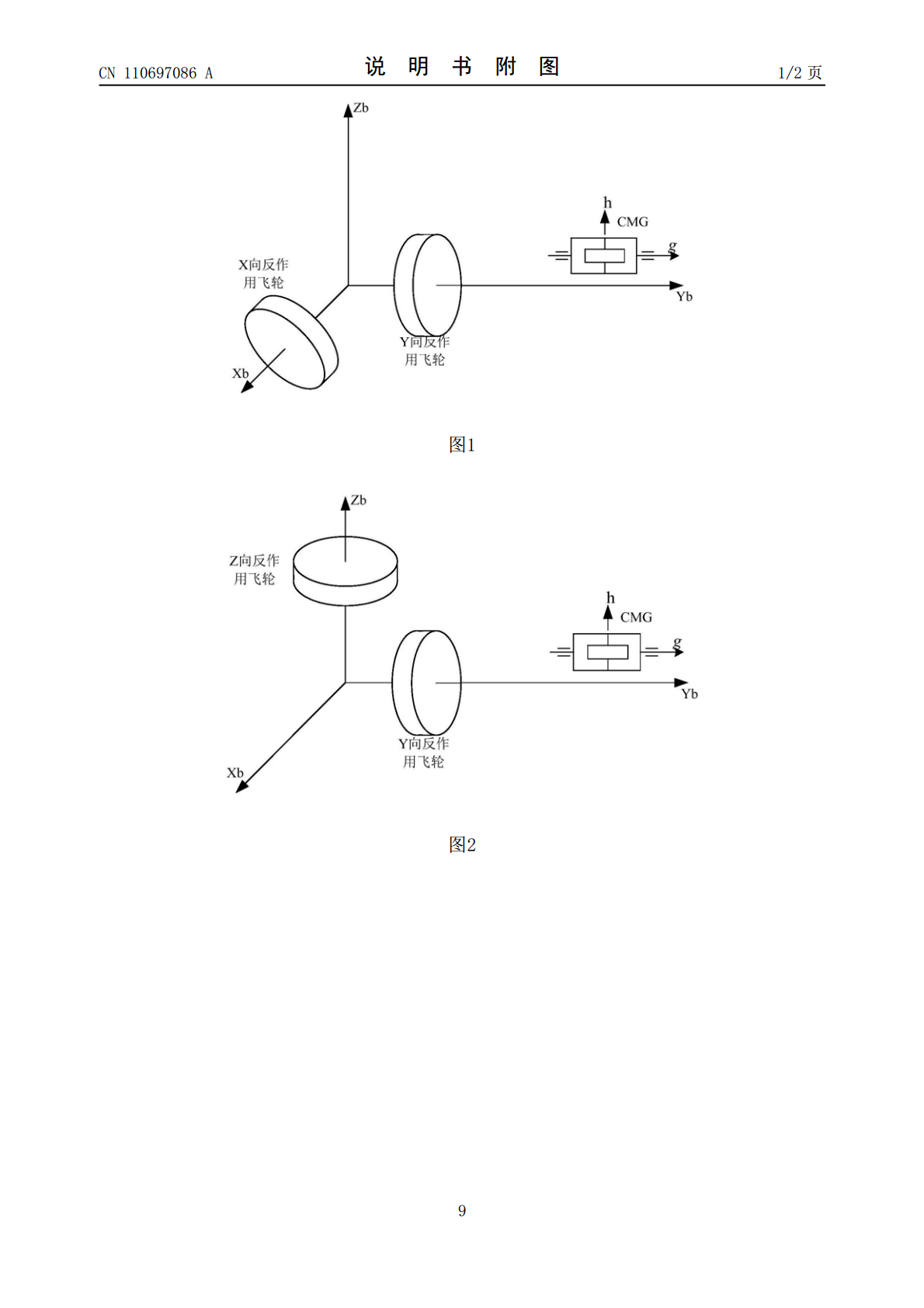
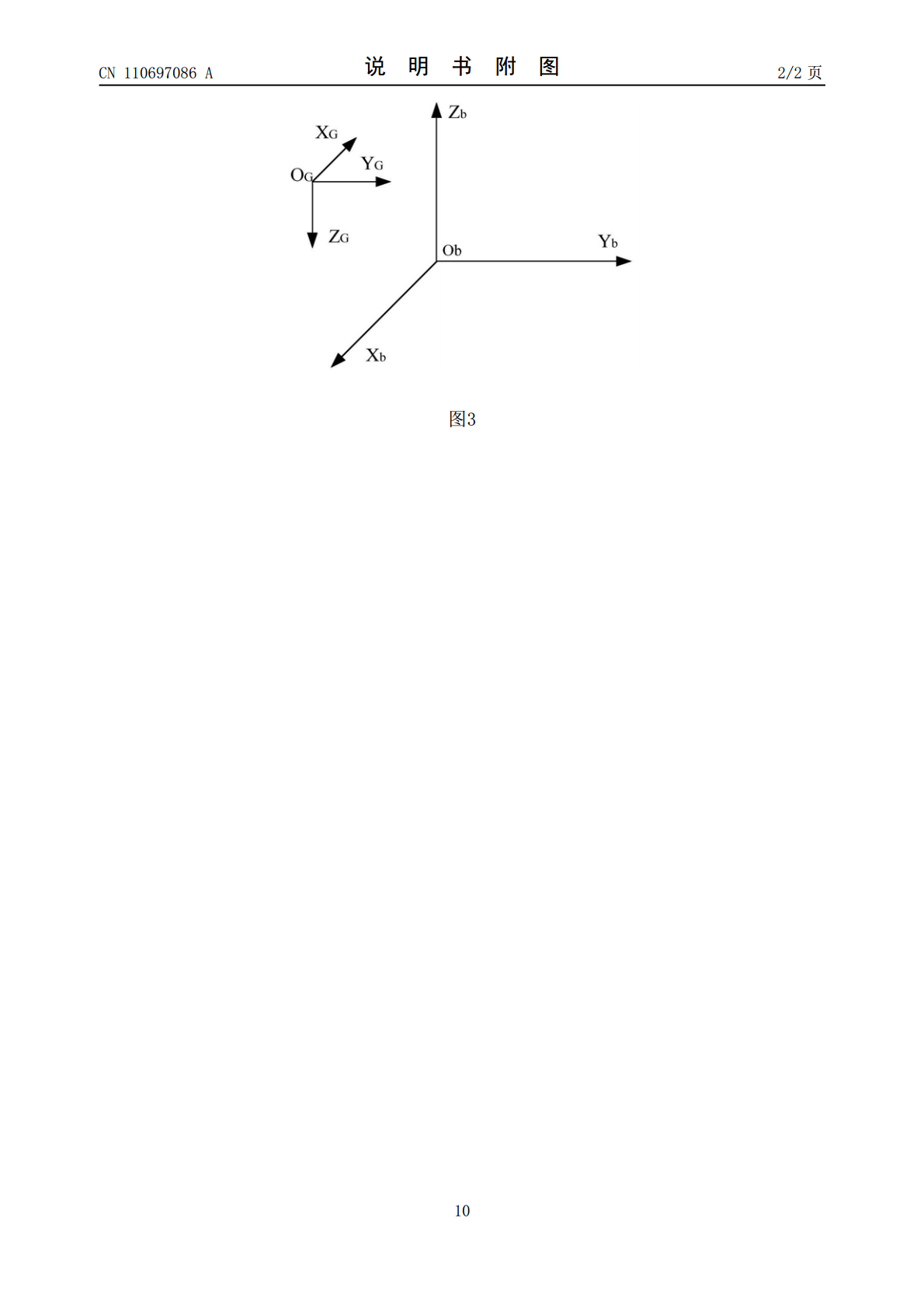
本发明涉及一种以单控制力矩陀螺和两飞轮实现卫星三轴稳定控制的方法,地面测控站远程控制卫星使用推力器控制姿态;根据CMG内转子转速指令,得到CMG内转子转速对应的角动量;根据CMG外框位置、有效的两台飞轮的转速指令,设置磁卸载目标角动量;根据指令力矩、CMG框架角位置、框架转速、系统控制周期,有效的两台飞轮的角动量控制指令等,计算更改的角动量控制指令,解算CMG框架角:允许单台CMG控制,选择单台CMG接入,有效的两台飞轮接入,使用飞轮控制卫星姿态。对采用飞轮和控制力矩陀螺为姿控主执行机构的卫星,本发明可以

基于控制力矩陀螺的卫星姿态机动与稳定控制.docx
基于控制力矩陀螺的卫星姿态机动与稳定控制I.引言卫星的姿态机动和稳定控制是卫星工程中的一个重要问题。其中,姿态机动是指卫星在轨道中改变自身的方向和速度,包括旋转、转弯、偏航、翻转等操作,是卫星完成其任务的关键之一。而稳定控制则是保持卫星在固定的姿态位置,使其获得最佳的传感器测量数据,同时有效地防止外部环境对卫星造成的干扰。因此,研究卫星姿态机动和稳定控制的方法和技术,对卫星工程的设计和运行至关重要。本文将介绍基于控制力矩陀螺的卫星姿态机动和稳定控制方法。控制力矩陀螺(CMG)是一种高精度的惯性合成器,可以
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法.pdf
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法,步骤为:(1)根据磁强计测量得到的地磁场强度矢量B确定磁控矩阵Γ(b),并根据实际的飞轮可用情况,确定飞轮控制矩阵K

基于控制力矩陀螺的卫星姿态机动与稳定控制的任务书.docx
基于控制力矩陀螺的卫星姿态机动与稳定控制的任务书任务书一、任务概述本次任务旨在通过控制力矩陀螺来实现卫星的姿态机动与稳定控制。卫星姿态机动是指卫星在运行过程中发生姿态变化的过程,包括姿态转移和姿态调整两个方面。卫星姿态稳定控制是指卫星在运行过程中保持稳定的姿态,以确保卫星正确地执行其任务。控制力矩陀螺是一种能够产生力矩的陀螺,通过控制陀螺的旋转来实现对卫星的姿态机动和稳定控制。二、任务目标1.实现卫星姿态机动和稳定控制利用控制力矩陀螺对卫星进行有效的姿态机动和稳定控制,保证卫星的正确运行和执行任务。2.设

基于磁力矩器和飞轮的卫星姿态全方位控制方法.pdf
基于磁力矩器和飞轮的卫星姿态全方位控制方法,涉及一种利用磁力矩器和飞轮完成卫星入轨阶段全方位姿态控制方法。解决了现有的卫星姿态全方位控制技术可靠性低、寿命短的问题,具体过程如下:一、根据控制系统要求,设定控制器参数;二、测量地磁场强度向量Bb、卫星角速度向量Wb和太阳方位角,并将测量数据发送至卫星控制器;三、计算期望控制力矩向量Tm和控制磁矩向量Mm,并将控制磁矩向量Mm发送至磁力矩器;四、获得有效太阳方位角向量Alfa;五、计算控制输入力矩向量Tw,并发送至飞轮;六、磁力矩器根据控制磁矩向量Mm,飞轮根