
一种教育用智能物流搬运机器人.pdf

淑然****by

1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种教育用智能物流搬运机器人.pdf
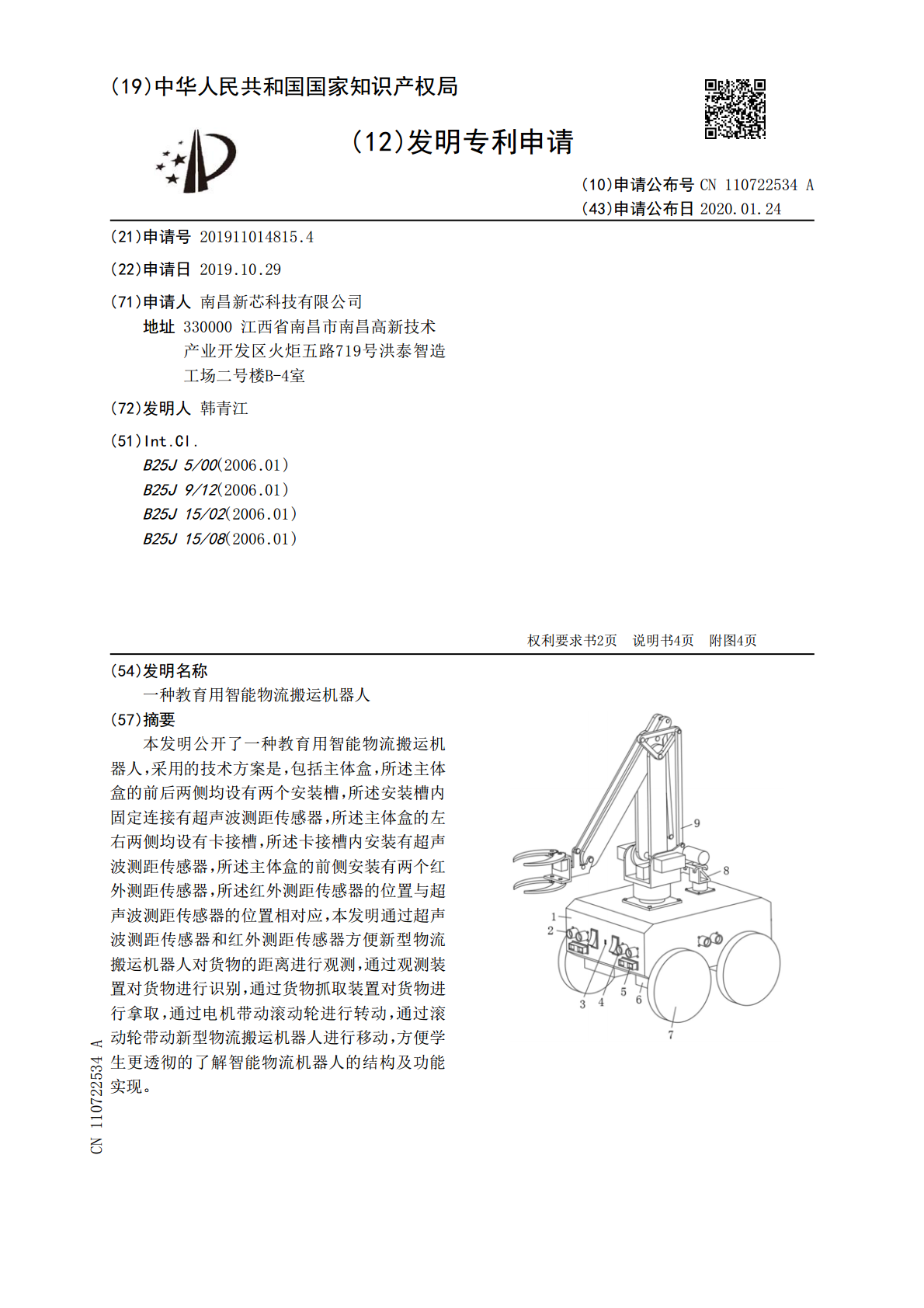
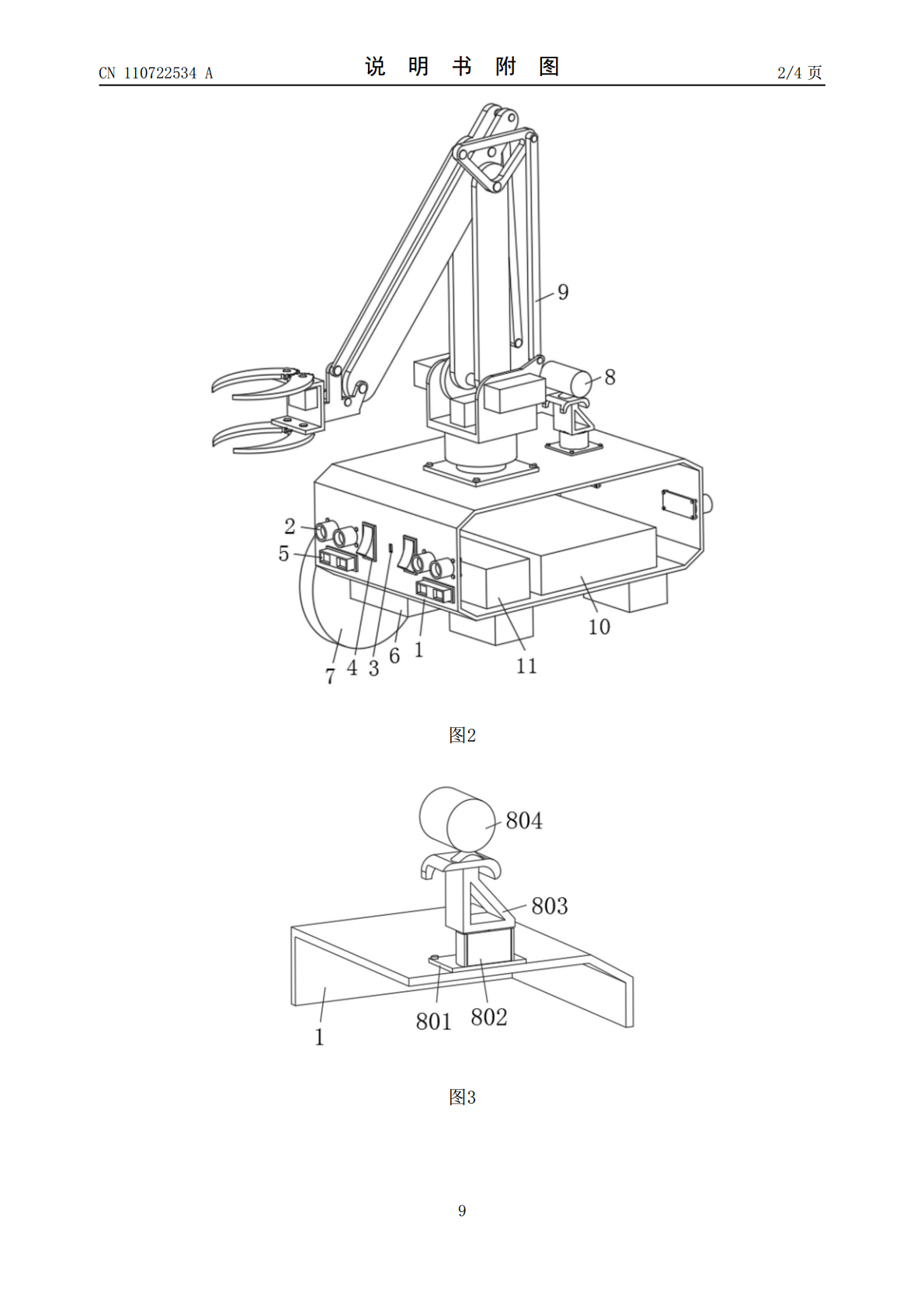
本发明公开了一种教育用智能物流搬运机器人,采用的技术方案是,包括主体盒,所述主体盒的前后两侧均设有两个安装槽,所述安装槽内固定连接有超声波测距传感器,所述主体盒的左右两侧均设有卡接槽,所述卡接槽内安装有超声波测距传感器,所述主体盒的前侧安装有两个红外测距传感器,所述红外测距传感器的位置与超声波测距传感器的位置相对应,本发明通过超声波测距传感器和红外测距传感器方便新型物流搬运机器人对货物的距离进行观测,通过观测装置对货物进行识别,通过货物抓取装置对货物进行拿取,通过电机带动滚动轮进行转动,通过滚动轮带动新型

一种物流仓库智能搬运机器人.pdf
本发明公开了一种物流仓库智能搬运机器人,包括底座和旋转支撑臂,所述底座下方固定有底部滚轮,所述底部滚轮左侧固定有连杆固定底座,且连杆固定底座侧面与保护罩相连接,所述支撑板上设置焊接有放置框,且放置框左侧固定有支柱,所述支柱前方固定有操作面板,所述保护罩内部安装有驱动装置和减速机,且减速机和驱动装置相连接。该物流仓库智能搬运机器人,采用电力驱动,减少取出物品过程中的体力消耗,采用下方升降气缸设置,提高设备的稳定效果,同时设备下方采用减震装置设备,提高设备的使用寿命,和运输过程中的稳定,且采用天线设置,提高智
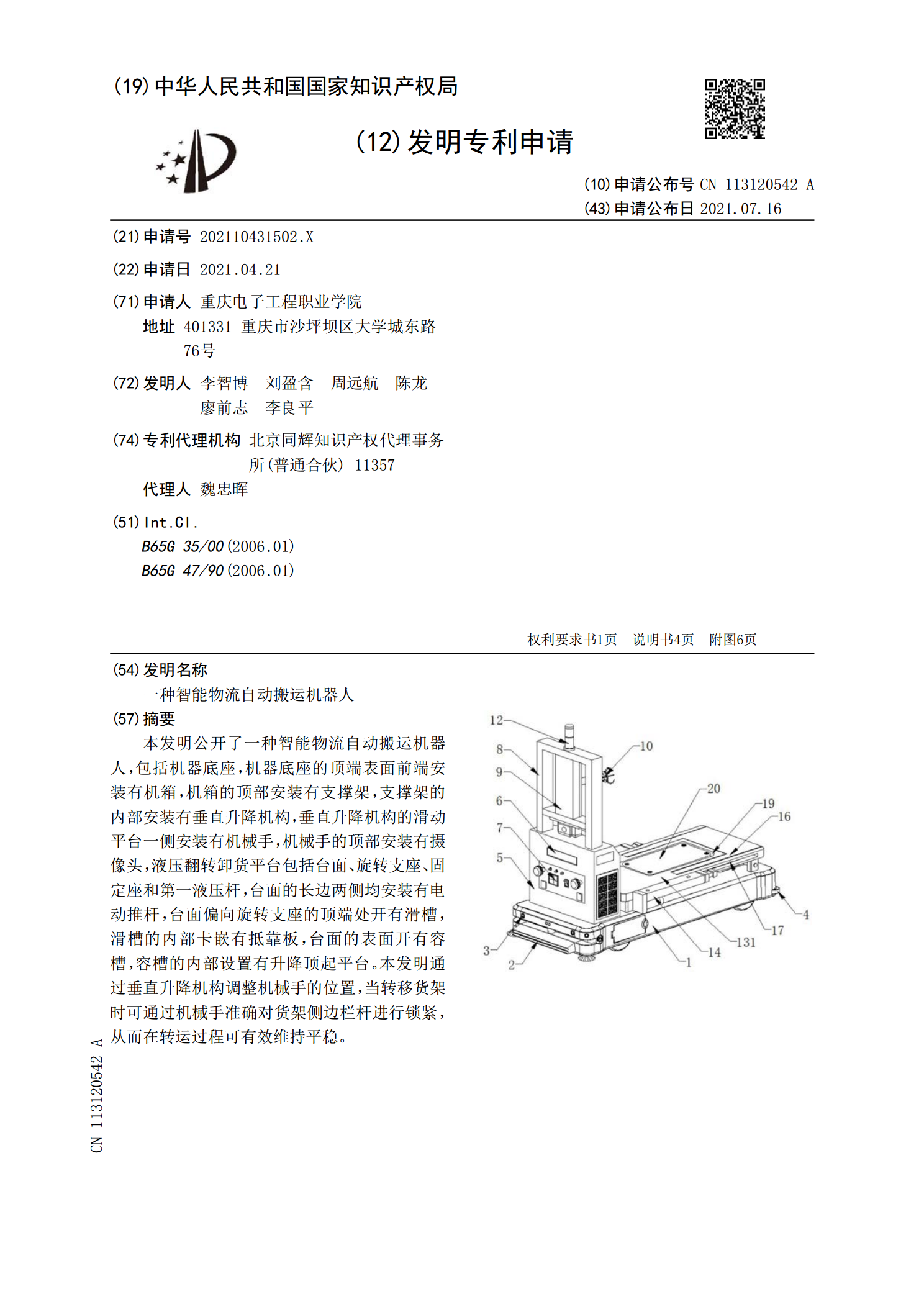
一种智能物流自动搬运机器人.pdf
本发明公开了一种智能物流自动搬运机器人,包括机器底座,机器底座的顶端表面前端安装有机箱,机箱的顶部安装有支撑架,支撑架的内部安装有垂直升降机构,垂直升降机构的滑动平台一侧安装有机械手,机械手的顶部安装有摄像头,液压翻转卸货平台包括台面、旋转支座、固定座和第一液压杆,台面的长边两侧均安装有电动推杆,台面偏向旋转支座的顶端处开有滑槽,滑槽的内部卡嵌有抵靠板,台面的表面开有容槽,容槽的内部设置有升降顶起平台。本发明通过垂直升降机构调整机械手的位置,当转移货架时可通过机械手准确对货架侧边栏杆进行锁紧,从而在转运过
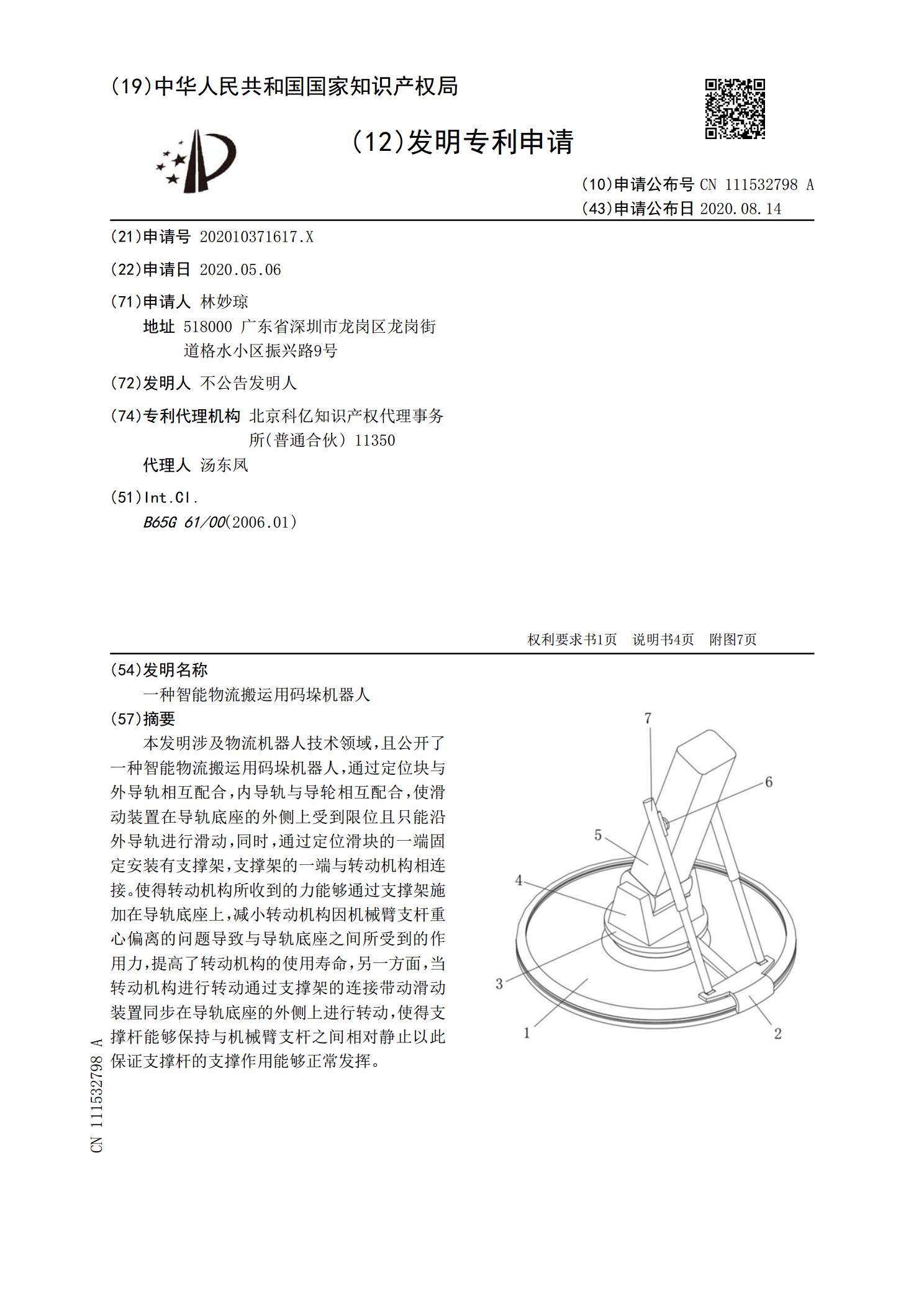
一种智能物流搬运用码垛机器人.pdf
本发明涉及物流机器人技术领域,且公开了一种智能物流搬运用码垛机器人,通过定位块与外导轨相互配合,内导轨与导轮相互配合,使滑动装置在导轨底座的外侧上受到限位且只能沿外导轨进行滑动,同时,通过定位滑块的一端固定安装有支撑架,支撑架的一端与转动机构相连接。使得转动机构所收到的力能够通过支撑架施加在导轨底座上,减小转动机构因机械臂支杆重心偏离的问题导致与导轨底座之间所受到的作用力,提高了转动机构的使用寿命,另一方面,当转动机构进行转动通过支撑架的连接带动滑动装置同步在导轨底座的外侧上进行转动,使得支撑杆能够保持与
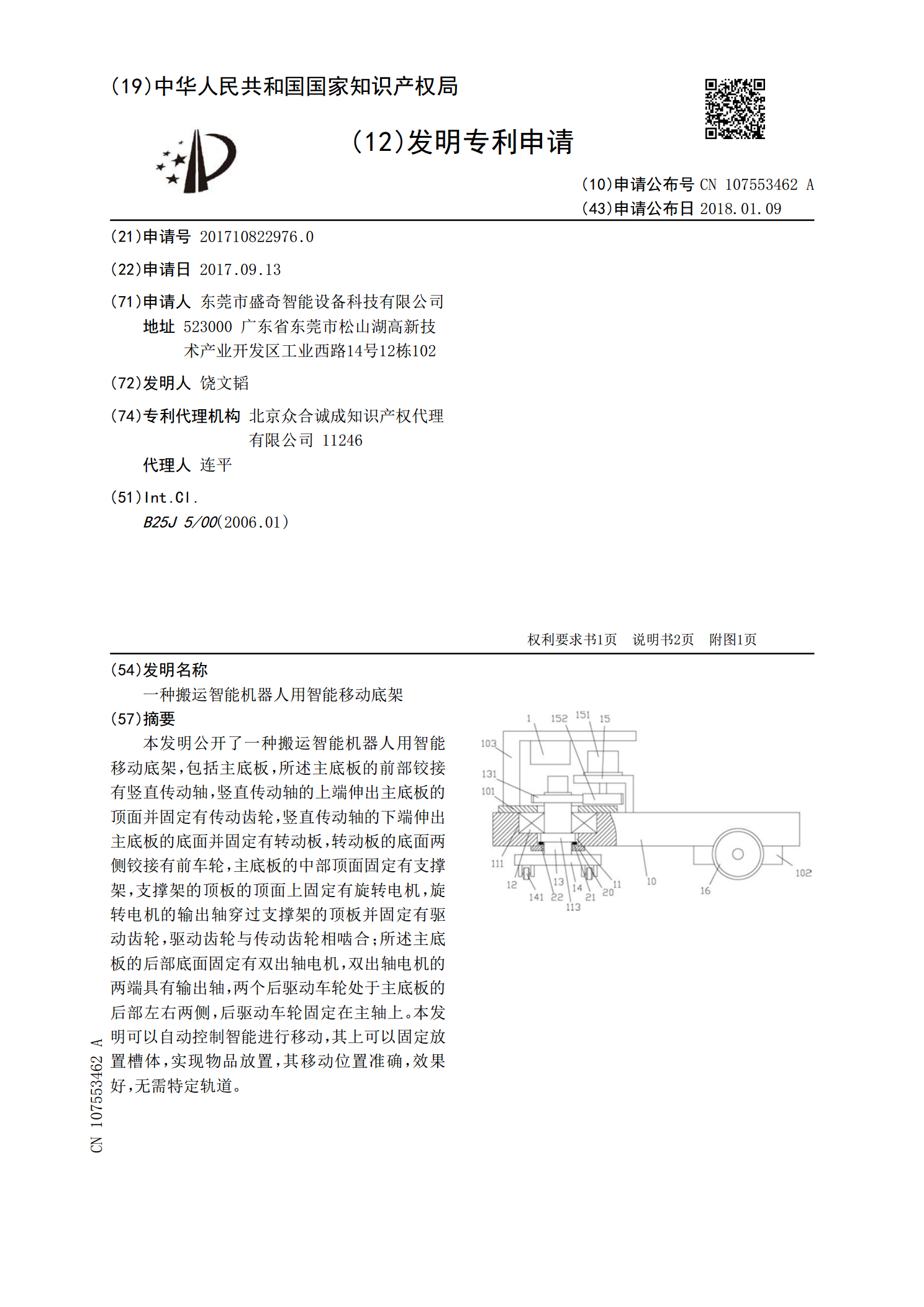
一种搬运智能机器人用智能移动底架.pdf
本发明公开了一种搬运智能机器人用智能移动底架,包括主底板,所述主底板的前部铰接有竖直传动轴,竖直传动轴的上端伸出主底板的顶面并固定有传动齿轮,竖直传动轴的下端伸出主底板的底面并固定有转动板,转动板的底面两侧铰接有前车轮,主底板的中部顶面固定有支撑架,支撑架的顶板的顶面上固定有旋转电机,旋转电机的输出轴穿过支撑架的顶板并固定有驱动齿轮,驱动齿轮与传动齿轮相啮合;所述主底板的后部底面固定有双出轴电机,双出轴电机的两端具有输出轴,两个后驱动车轮处于主底板的后部左右两侧,后驱动车轮固定在主轴上。本发明可以自动控制