
一种智能车赛道识别循迹控制方法.pdf

Ja****20


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能车赛道识别循迹控制方法.pdf
本发明涉及一种智能车赛道识别循迹控制方法,包括以下步骤:采集赛道的原始灰度图,对所述原始灰度图进行二值化处理获得黑白图像;对所述黑白图像进行图像分割;提取所述黑白图像中部全白列的特征;提取所述黑白图像赛道一侧的黑色区域中的半月形特征;提取所述黑白图像赛道另一侧的黑色区域轮廓线自下而上向所述半月形特征所在赛道一侧的方向延伸的特征;提取所述黑白图像白色区域中向所述半月形特征所在赛道一侧的方向延伸的特征;根据提取到的特征识别判断赛道类型;根据赛道类型控制智能车的行驶。

基于边缘检测算法的智能车赛道识别方法.docx
基于边缘检测算法的智能车赛道识别方法丁芳,刘宇,夏阳,王海库(中国民航大学航空自动化学院天津300300)摘要:赛道的识别是智能车沿赛道行驶的基础。准确的赛道识别能够为智能车进行方向控制和速度控制提供准确、必要的信息。本文利用边缘检测算法对赛道图像进行处理和识别。边缘检测算法与简单的二值化法相比具有处理时间短和处理效果好的优点。基于边缘检测算法的智能车赛道识别方法在以CMOS图像传感器采集图像信息的智能车上实现。实验表明:这种赛道引导线的识别方法准确率很高,可以较好地满足车寻迹行驶的要求。关键词:赛道识别

基于边缘检测算法的智能车赛道识别方法.doc
基于边缘检测算法的智能车赛道识别方法丁芳,刘宇,夏阳,王海库(中国民航大学航空自动化学院天津300300)摘要:赛道的识别是智能车沿赛道行驶的基础。准确的赛道识别能够为智能车进行方向控制和速度控制提供准确、必要的信息。本文利用边缘检测算法对赛道图像进行处理和识别。边缘检测算法与简单的二值化法相比具有处理时间短和处理效果好的优点。基于边缘检测算法的智能车赛道识别方法在以CMOS图像传感器采集图像信息的智能车上实现。实验表明:这种赛道引导线的识别方法准确率很高,可以较好地满足车寻迹行驶的要求。关键词:赛道识别
智能循迹小车的控制方法.pdf
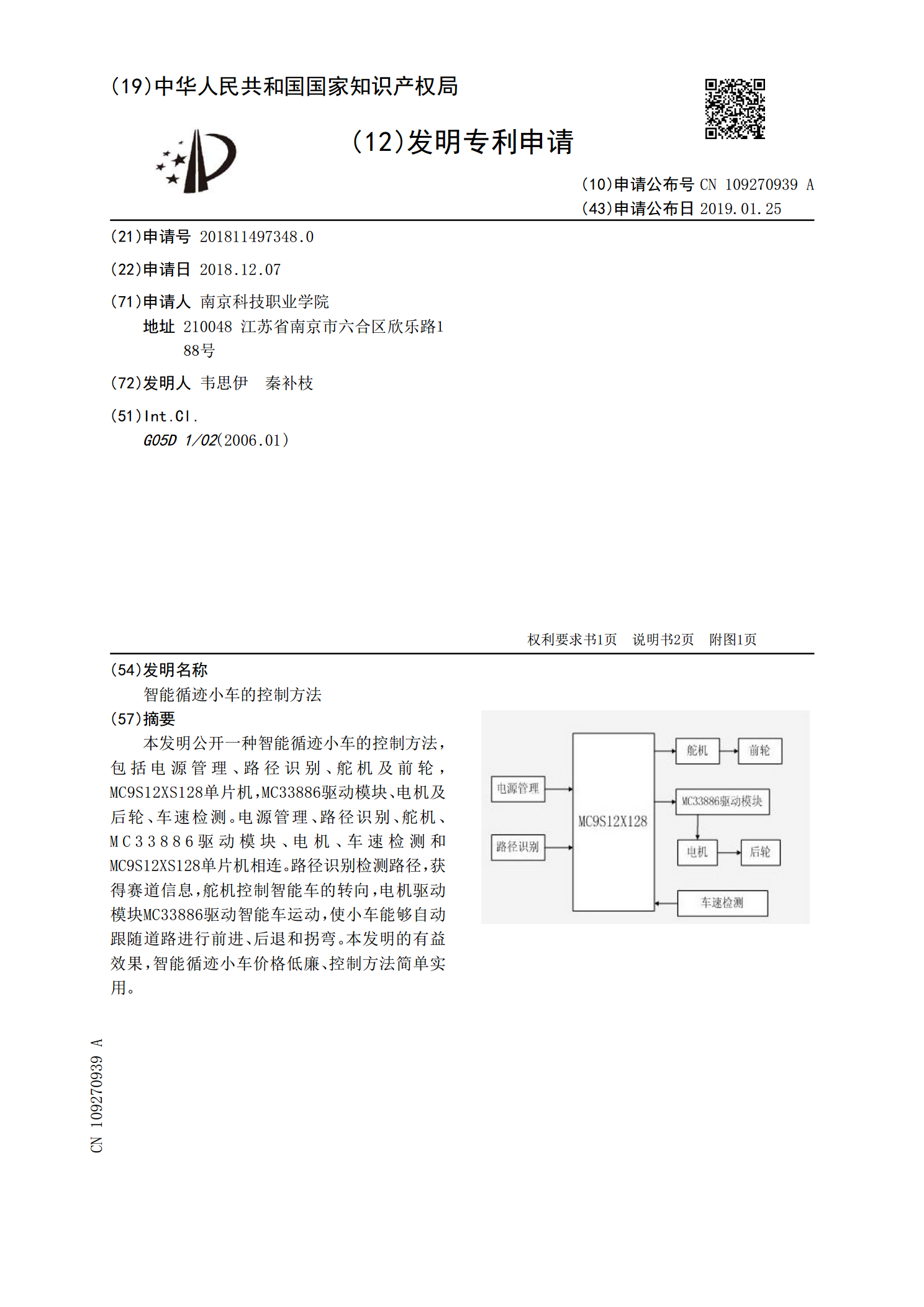
本发明公开一种智能循迹小车的控制方法,包括电源管理、路径识别、舵机及前轮,MC9S12XS128单片机,MC33886驱动模块、电机及后轮、车速检测。电源管理、路径识别、舵机、MC33886驱动模块、电机、车速检测和MC9S12XS128单片机相连。路径识别检测路径,获得赛道信息,舵机控制智能车的转向,电机驱动模块MC33886驱动智能车运动,使小车能够自动跟随道路进行前进、后退和拐弯。本发明的有益效果,智能循迹小车价格低廉、控制方法简单实用。

基于摄像头的智能车循迹方法.pdf
基于摄像头的智能车循迹方法【摘要】本文基于摄像头传感器设计并实现智能车自主循迹行驶。采用摄像头传感器的信号采样模块获取赛道黑线信息,高效稳定的循迹算法使小车能够自主识别黑色引导线并根据黑色引导线实现快速稳定的寻线行驶。【关键词】智能;传感器;pid一、前言智能车辆(intelligntvehicle-iv),又叫轮式移动机器人,是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统[1],它体现了自动控制、人工智能、传感技术、机械技术、计算机技术等多个学科领域理论技术的交叉和综合。自主导航技术是