
一种空调污染快速检测系统及检测方法.pdf

猫巷****傲柏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种空调污染快速检测系统及检测方法.pdf
本发明公开了一种空调污染快速检测系统及检测方法;所述一种空调污染快速检测包括:空气取样机器人和控制监控系统;所述空气取样机器人由行走机构、固定安装在行走机构上的空气检测单元构成;所述空气取样机器人上设有无线通信模块和红外线感应器,可通过无线通信协议与控制监控系统通信;所述行走机构包括:固定安装在机器本体上的驱动马达,套接在驱动马达传动轮上的攀升履带组件,以及固定连接在机器本体上的夹紧机构。本发明空气取样机器人和控制监控系统协调运作,空气取样机器人通过行走机构实现对楼宇外侧空调排风口处空气质量快速检测,从而

一种快速无损检测织物密度的检测系统及检测方法.pdf
本发明公开一种快速无损检测织物密度的检测系统,包括尺寸对比模块、平台模块、图像采集模块、处理模块;平台模块固定待检测物以及配合尺寸对比模块形成可用于实时检测的待检测物,图像采集模块根据操作人员目标检测位置,采集对应图像信息及实时备份存储数据,备份后的原始数据转移至处理模块,处理模块根据纤维的空间层转换,计算出指定范围内的待检测物的织物密度,本发明还公开一种应用检测系统的检测方法。相对现有技术,本发明技术方案具有方便、实时且可追溯等优点,本发明不仅具有快速方便、不会损伤织物的优点,而且数据能够追溯、重现性好
一种医用快速生化检测系统及检测方法.pdf
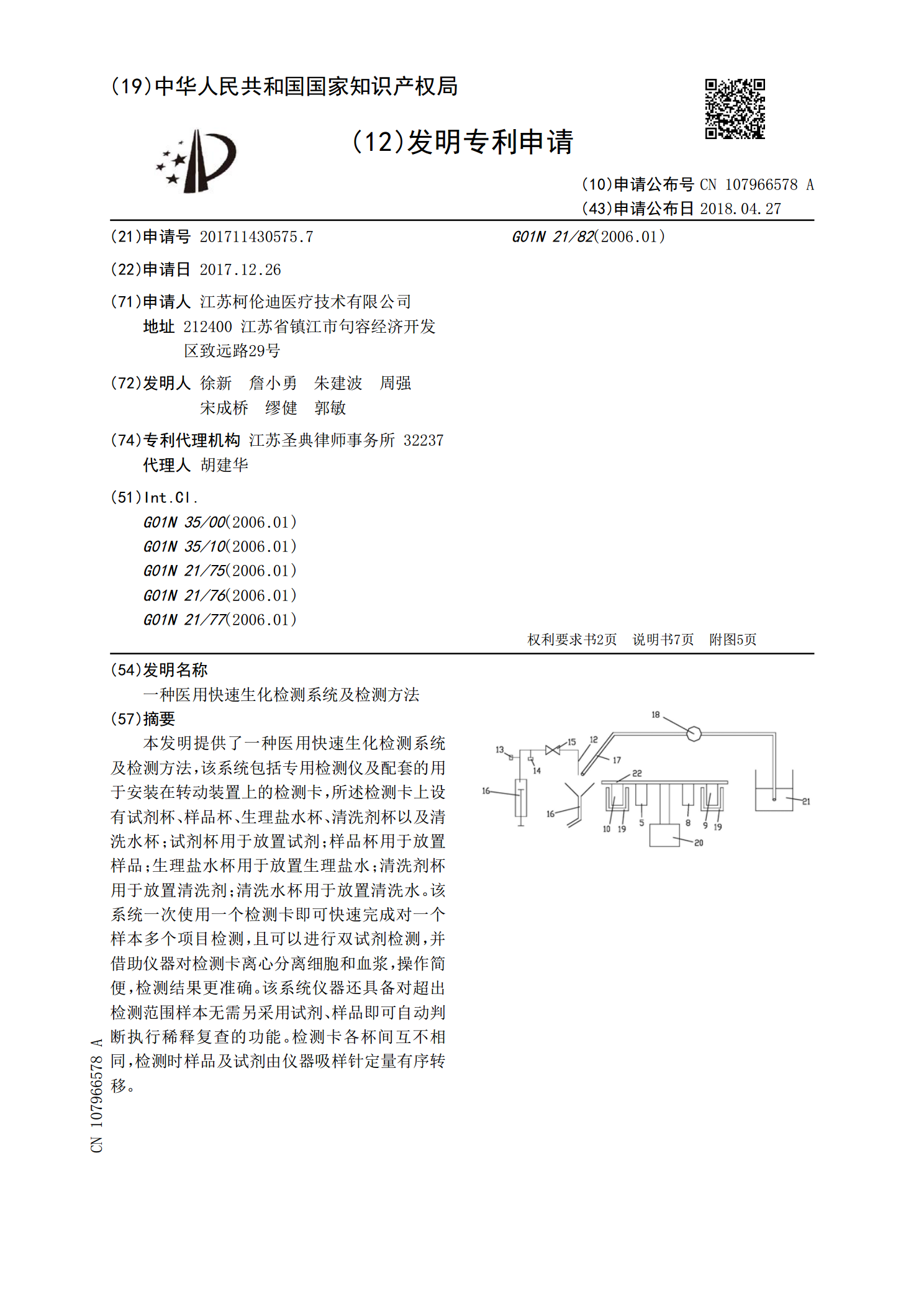
本发明提供了一种医用快速生化检测系统及检测方法,该系统包括专用检测仪及配套的用于安装在转动装置上的检测卡,所述检测卡上设有试剂杯、样品杯、生理盐水杯、清洗剂杯以及清洗水杯;试剂杯用于放置试剂;样品杯用于放置样品;生理盐水杯用于放置生理盐水;清洗剂杯用于放置清洗剂;清洗水杯用于放置清洗水。该系统一次使用一个检测卡即可快速完成对一个样本多个项目检测,且可以进行双试剂检测,并借助仪器对检测卡离心分离细胞和血浆,操作简便,检测结果更准确。该系统仪器还具备对超出检测范围样本无需另采用试剂、样品即可自动判断执行稀释复

一种快速检测细胞株交叉污染的方法.docx
一种快速检测细胞株交叉污染的方法细胞株交叉污染是细胞培养中常见的问题之一,尤其在长期的细胞培养中,不注意细胞的标记和编号容易导致细胞株的混杂和误识别。进一步引入不同基因型、表型和生长特性的细胞,这在实验中将导致错误的结果和不准确的结论。因此,缩短对细胞株交叉污染的检测时间和提高检测准确性至关重要。在本文中,我们将探讨一种快速检测细胞株交叉污染的方法。现有的细胞株交叉污染检测方法包括核型分析、同工酶分析、DNA指纹图谱分析等。虽然这些方法具有一定的准确性,但是却需要较长时间和高昂的成本,因此不是所有实验室都

一种快速人脸检测方法及系统.pdf
本申请一种快速人脸检测方法及系统,属于智慧教学领域,在对图像进行人脸检测之前去除无效的图像区域,保留有效检测区域,从而减小待人脸检测图像的大小,尤其对于高清图像而言可有效提高人脸检测速度;实施本发明的技术方案可高效处理视频流的帧图像这样处理量庞大的数据,裁剪图像的无效区域可有效节约运算资源,为后续的智慧课堂管理系统提供充足的计算资源,有利于系统其余功能的开发和扩展。