
一种模块化对接机构的自锁式平面连接装置.pdf

书生****aa


1/8
2/8
3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种模块化对接机构的自锁式平面连接装置.pdf
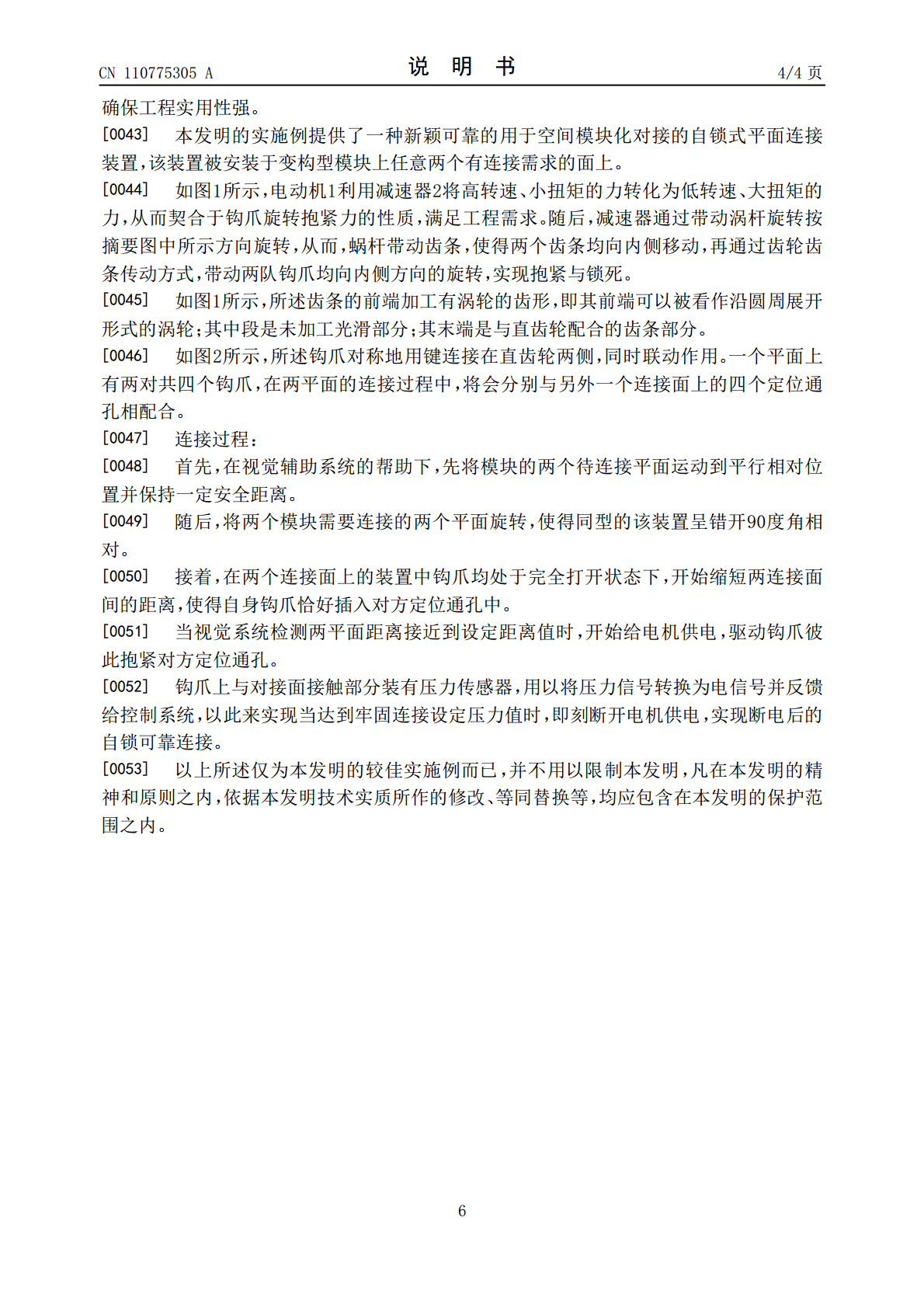
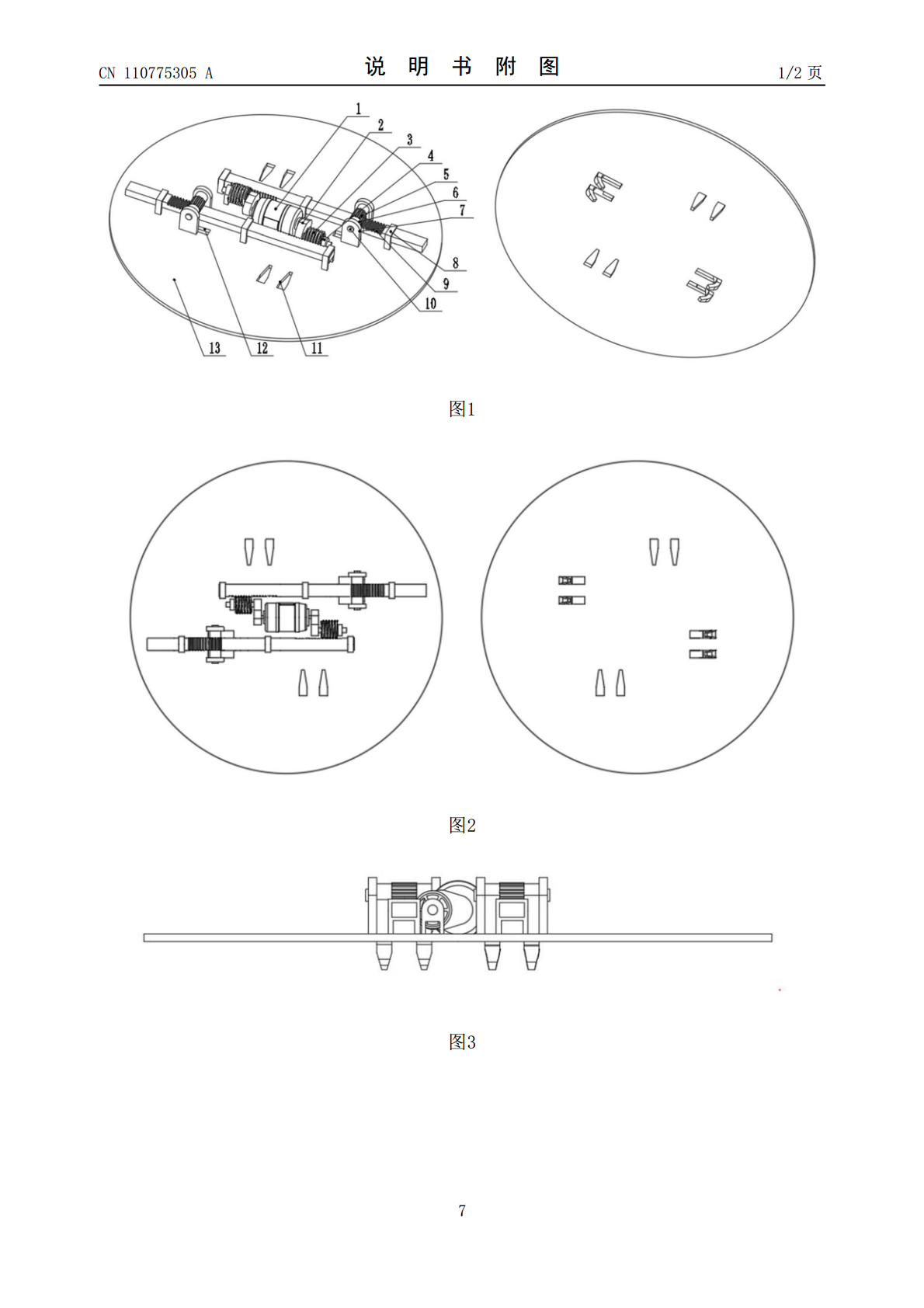
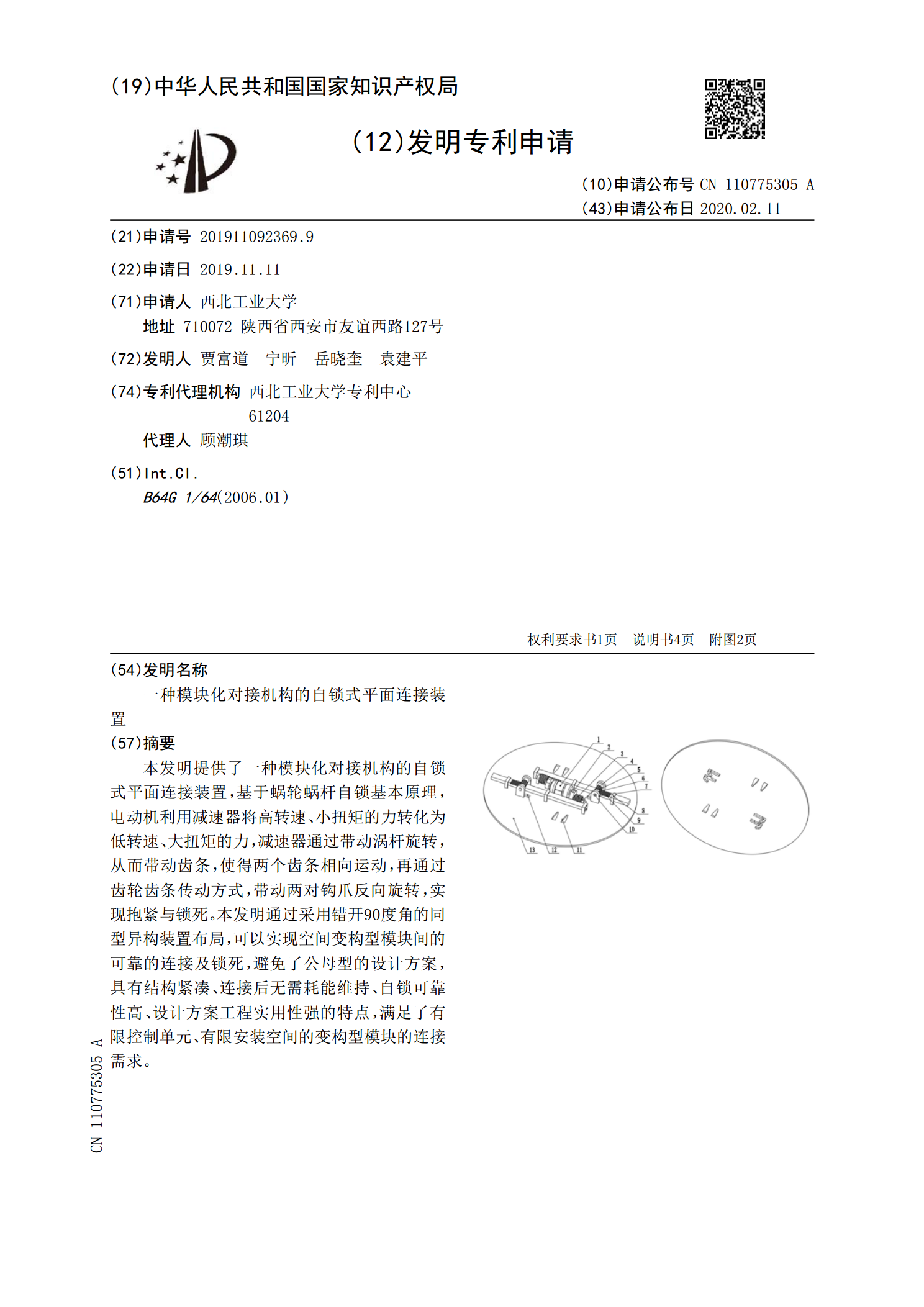
本发明提供了一种模块化对接机构的自锁式平面连接装置,基于蜗轮蜗杆自锁基本原理,电动机利用减速器将高转速、小扭矩的力转化为低转速、大扭矩的力,减速器通过带动涡杆旋转,从而带动齿条,使得两个齿条相向运动,再通过齿轮齿条传动方式,带动两对钩爪反向旋转,实现抱紧与锁死。本发明通过采用错开90度角的同型异构装置布局,可以实现空间变构型模块间的可靠的连接及锁死,避免了公母型的设计方案,具有结构紧凑、连接后无需耗能维持、自锁可靠性高、设计方案工程实用性强的特点,满足了有限控制单元、有限安装空间的变构型模块的连接需求。

一种电磁自锁平面连接装置.pdf
本发明属于空间模块化机构对接技术领域,具体地说,涉及一种电磁自锁平面连接装置。本发明利用电磁力和齿轮齿条传动结合的方式,解决的利用卡爪旋转实现对接的问题,由于电磁力驱动简单,不需要电机驱动所依赖的复杂的控制器和减速装置,本发明能够降低连接装置的生产成本,并能有效减小连接装置的体积和重量;由于连接装置具有自锁功能,所以在连接装置完成连接任务后,驱动器可以断电不用担心断电后连接脱离的问题,能够提高连接的可靠性。
一种自锁式的模块化钢结构连接节点.pdf
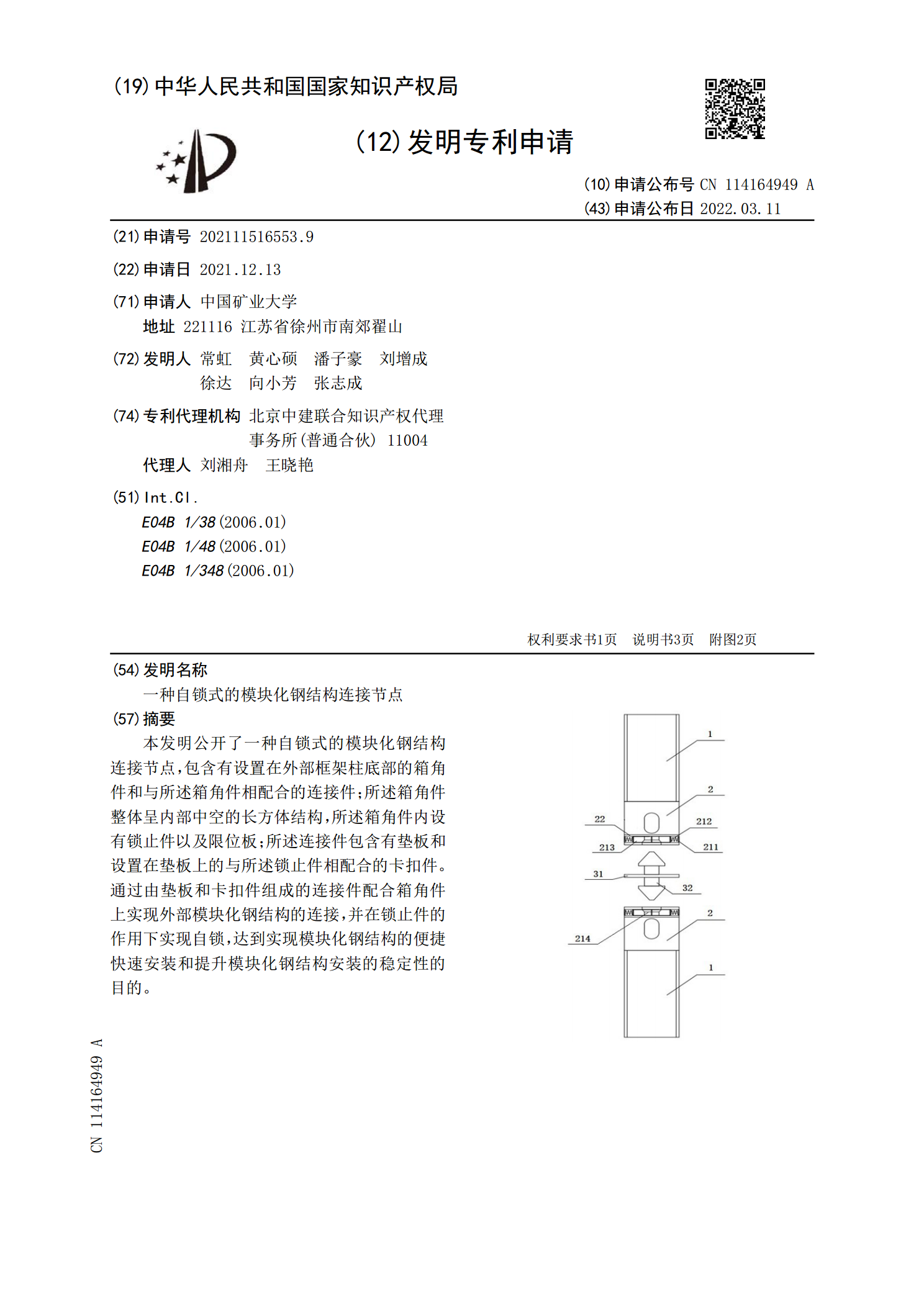
本发明公开了一种自锁式的模块化钢结构连接节点,包含有设置在外部框架柱底部的箱角件和与所述箱角件相配合的连接件;所述箱角件整体呈内部中空的长方体结构,所述箱角件内设有锁止件以及限位板;所述连接件包含有垫板和设置在垫板上的与所述锁止件相配合的卡扣件。通过由垫板和卡扣件组成的连接件配合箱角件上实现外部模块化钢结构的连接,并在锁止件的作用下实现自锁,达到实现模块化钢结构的便捷快速安装和提升模块化钢结构安装的稳定性的目的。

一种大出力自锁式自动连接机构.pdf
本发明涉及一种大出力自锁式自动连接机构,具体来说是一种弧形轨道对接机构,以解决现有弧形轨道对接是利用两个轨道的首尾端上的槽进行拼插定位,这种对接定位方式存在产生偏差的问题。第一转动块、限位块、胀紧套和第二转动块由上至下依次设置在凸轮轴上,第二转动块与凸轮轴的连接处为偏心轴,凸轮轴的上、下端分别与两个凸轮轴座转动连接,第一转动块和第二转动块的同一侧端面上分别固装有一个固定脚,第一转动块和第二转动块的另一侧端面分别固定一个弹簧连接杆,每个弹簧连接杆上固定一个复位弹簧,蜗轮通过胀紧套装在凸轮轴上,蜗杆的轴线与凸

一种变构型模块丝杠自锁平面连接装置.pdf
本发明为一种变构型模块丝杠自锁平面连接装置,属于空间对接技术领域,具体地说,涉及一种适应于变构型模块连接的平面装置和丝杠自锁机构,通过合理利用丝杠与齿轮传动,不仅能够降低连接装置的生产成本,还可有效减小连接装置的体积和重量,由于连接装置具有自锁功能,所以在连接装置完成连接任务后,驱动器可以关机而不用担心断电后连接脱离的问题,大大节约了能源。