
一种基于Kinect的手势追踪和精准指尖定位系统.pdf

星菱****23

1/9

2/9
3/9

4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于Kinect的手势追踪和精准指尖定位系统.pdf
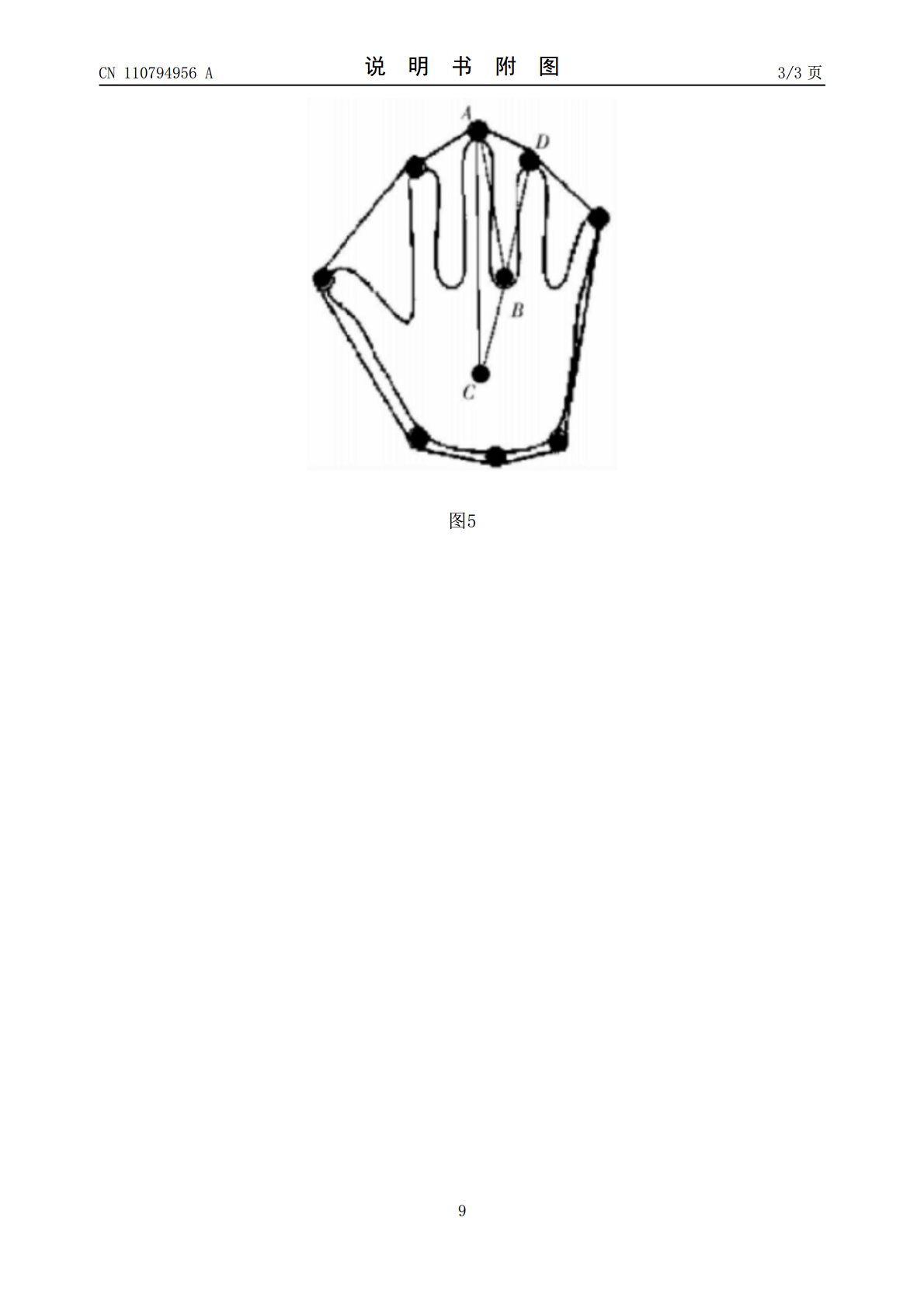
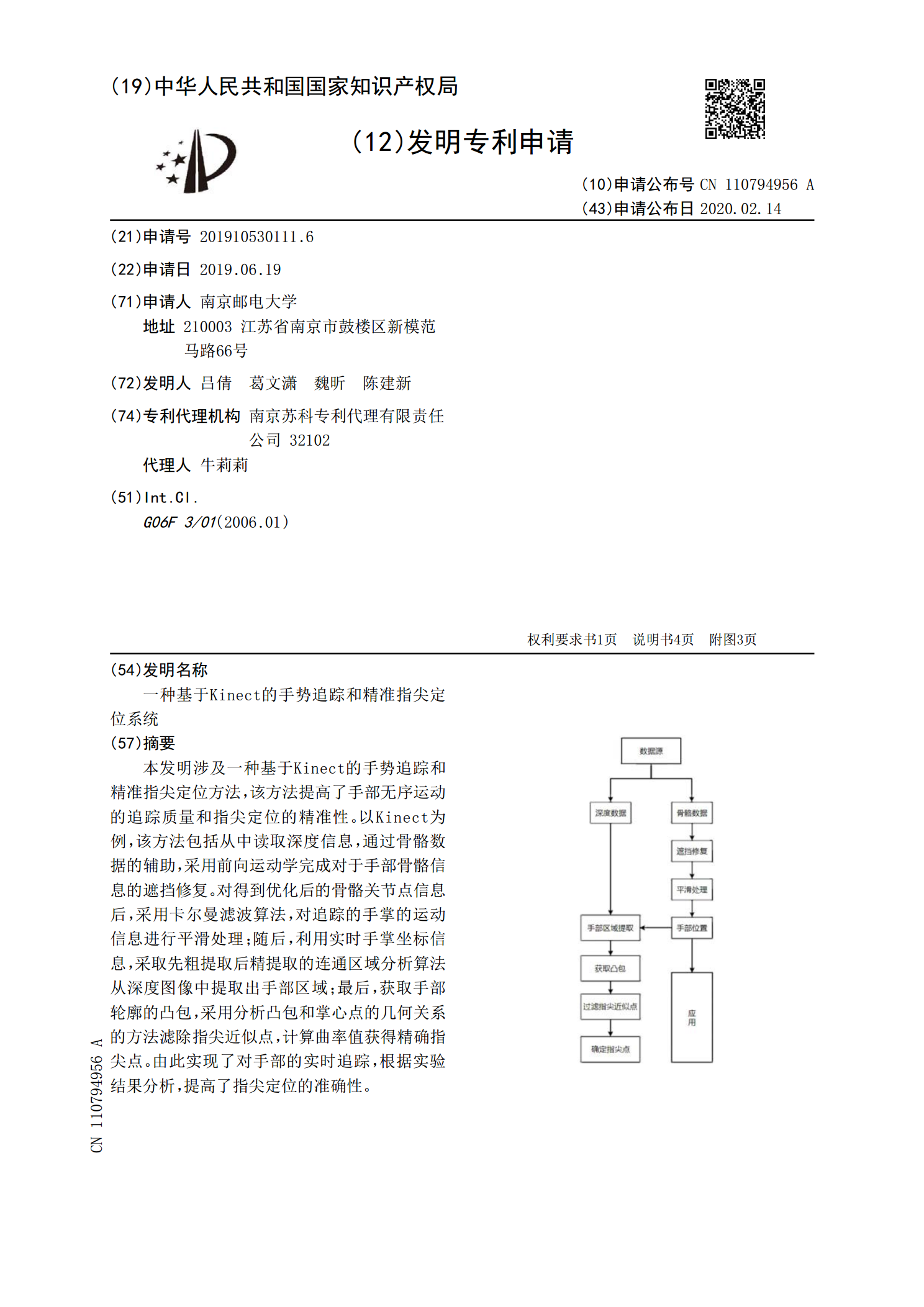
本发明涉及一种基于Kinect的手势追踪和精准指尖定位方法,该方法提高了手部无序运动的追踪质量和指尖定位的精准性。以Kinect为例,该方法包括从中读取深度信息,通过骨骼数据的辅助,采用前向运动学完成对于手部骨骼信息的遮挡修复。对得到优化后的骨骼关节点信息后,采用卡尔曼滤波算法,对追踪的手掌的运动信息进行平滑处理;随后,利用实时手掌坐标信息,采取先粗提取后精提取的连通区域分析算法从深度图像中提取出手部区域;最后,获取手部轮廓的凸包,采用分析凸包和掌心点的几何关系的方法滤除指尖近似点,计算曲率值获得精确指尖

基于Kinect和指尖识别的EAST手势交互系统的中期报告.docx
基于Kinect和指尖识别的EAST手势交互系统的中期报告摘要:本文旨在对基于Kinect和指尖识别的EAST手势交互系统进行中期报告。本项目目标是开发出一种手势交互系统,利用Kinect传感器和指尖识别技术,允许用户通过自然的手势实现操作。本文主要介绍了系统设计、硬件实现、软件实现等方面的中期进展。1.引言手势交互技术已经成为了计算机领域的一个热门话题。利用手势交互技术,可以让用户通过简单的手势来进行操作,避免了使用鼠标或键盘等输入设备的烦琐和不便。本项目利用Kinect传感器和指尖识别技术,开发了一款

基于Kinect和指尖识别的EAST手势交互系统的任务书.docx
基于Kinect和指尖识别的EAST手势交互系统的任务书任务书一、任务背景随着科技的不断发展,人们对于交互方式的要求也在不断提高。手势交互作为其中一种较为便捷的交互方式,已经在许多领域得到了应用。EAST技术被广泛应用于目标检测领域,其具有有效率高,速度快,准确性高的特点,因此,基于Kinect和指尖识别的EAST手势交互系统的研发是十分必要的。二、需求描述本系统主要应用于家庭娱乐、智能家居等领域中,可以通过手势操作控制电视、音响、灯光等设备的开关和音量等。因此,本系统需要具备以下功能:1.首先需要使用K

基于Kinect深度图像的指尖识别及手势判定.docx
基于Kinect深度图像的指尖识别及手势判定摘要:手势识别技术在许多领域,如虚拟实境、交互式计算机游戏、智能交通、医学等领域中都有广泛的应用。而Kinect深度图像技术作为一种专门用于3D立体成像和实时运动追踪的传感器设备,可以有效地解决传统摄像头的束缚问题。本篇论文就基于Kinect深度图像技术,设计并实现了一种指尖识别的手势识别系统,并通过实验验证了该系统的准确性和实用性。关键词:Kinect深度图像,手势识别,指尖识别1.研究背景随着科技的不断发展,手势识别技术得到了越来越广泛的应用。在虚拟实境中,

基于指尖定位的手势识别算法研究.docx
基于指尖定位的手势识别算法研究基于指尖定位的手势识别算法研究摘要:手势识别算法是人机交互中重要的一部分,它可以通过监测和分析用户的手势来实现手势控制。本文研究了一种基于指尖定位的手势识别算法,并将其应用于实际的手势控制系统中。通过对手势识别算法进行优化和改进,实现了高准确性和高实时性的手势识别。实验证明,所提出的算法在手势控制系统中具有良好的性能和稳定性。第一章绪论手势识别技术是一种非接触式的人机交互技术,它可以通过对人体手势的监测和分析来实现人机交互的控制。随着移动设备和虚拟现实技术的发展,手势识别技术