
基于电机转向的双驱全向前移式叉车转向控制方法及其叉车.pdf

俊凤****bb

1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于电机转向的双驱全向前移式叉车转向控制方法及其叉车.pdf
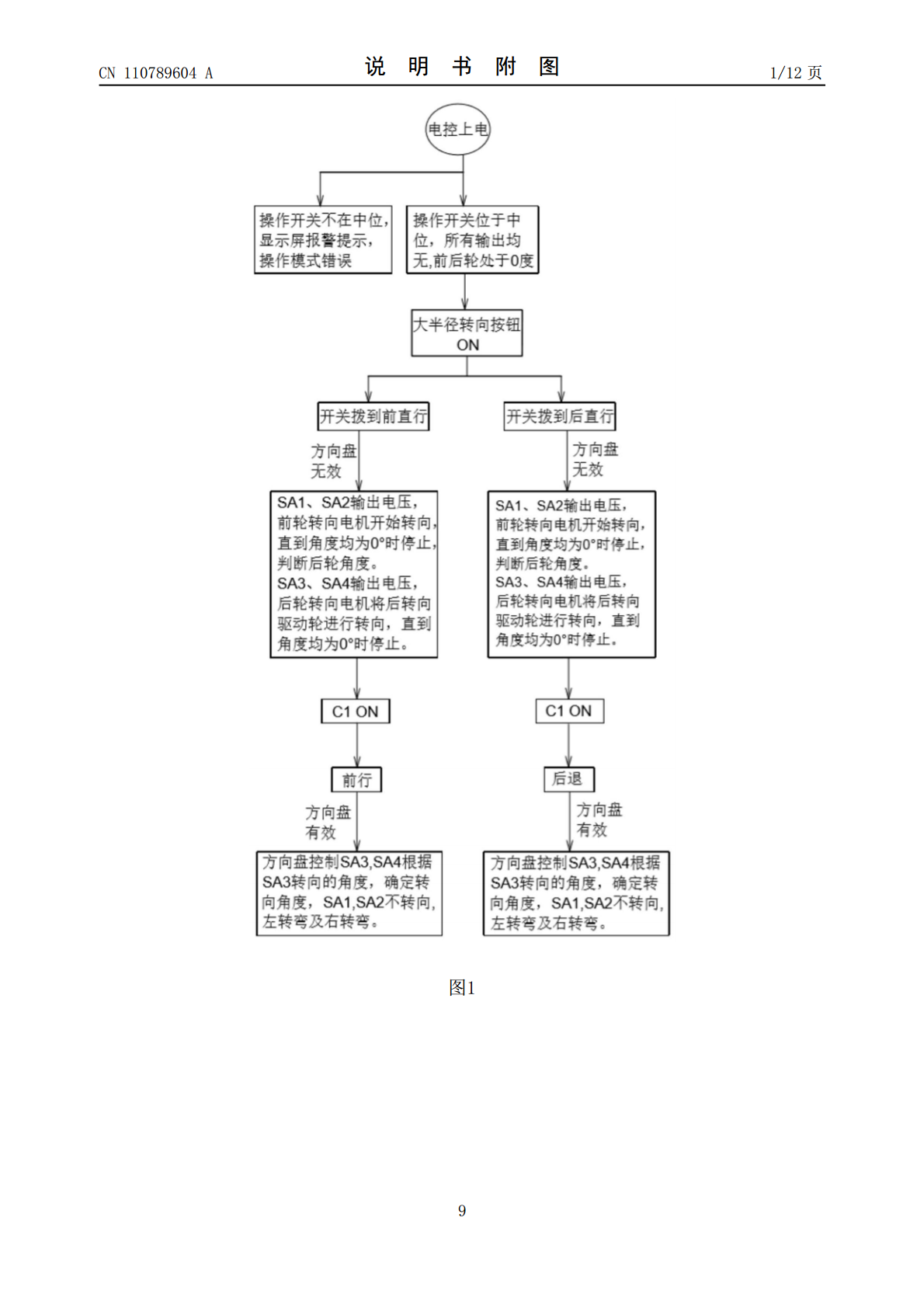
本发明公开了基于电机转向的双驱全向前移式叉车转向控制方法及其叉车,包括以下步骤:S1、在模式开关上进行模式选择;S2、左转向驱动轮产生一定的转向角度和转向速度;S3、转向电机控制器控制右后转向驱动轮的转向电机;S41、行进中切换成对角转向模式;S42、行进中切换成巷道模式;S43、行进中切换成原地回转、小半径转向或大半径转向;S44、行进中切换成直行小半径或侧行小半径模式;S45、行进中切换成直行大半径或侧行大半径模式。本发明提供了基于电机转向的双驱全向前移式叉车转向控制方法,能够实现对角转向、巷道模式、

一种基于电机转向的双驱全向前移式叉车转向系统和方法.pdf
本发明公开了一种基于电机转向的双驱全向前移式叉车转向系统,包括转向电机,该转向系统是基于所述转向电机横置带动主动锥齿轮和大链轮等传动机构,将转向电机的扭矩传递给转向轮,所述转向电机上设置有电机编码器,所述转向电机为直流转向电机,本发明通过直流转向电机取代液压传动形式,转向轮转向反应速度快,定位精准,同时横置式转向电机的安装位置降低了转向轮的高度,减小了物料的堆垛难度,增大了货架是利用空间,满足了不用尺寸转向电机的安装要求。
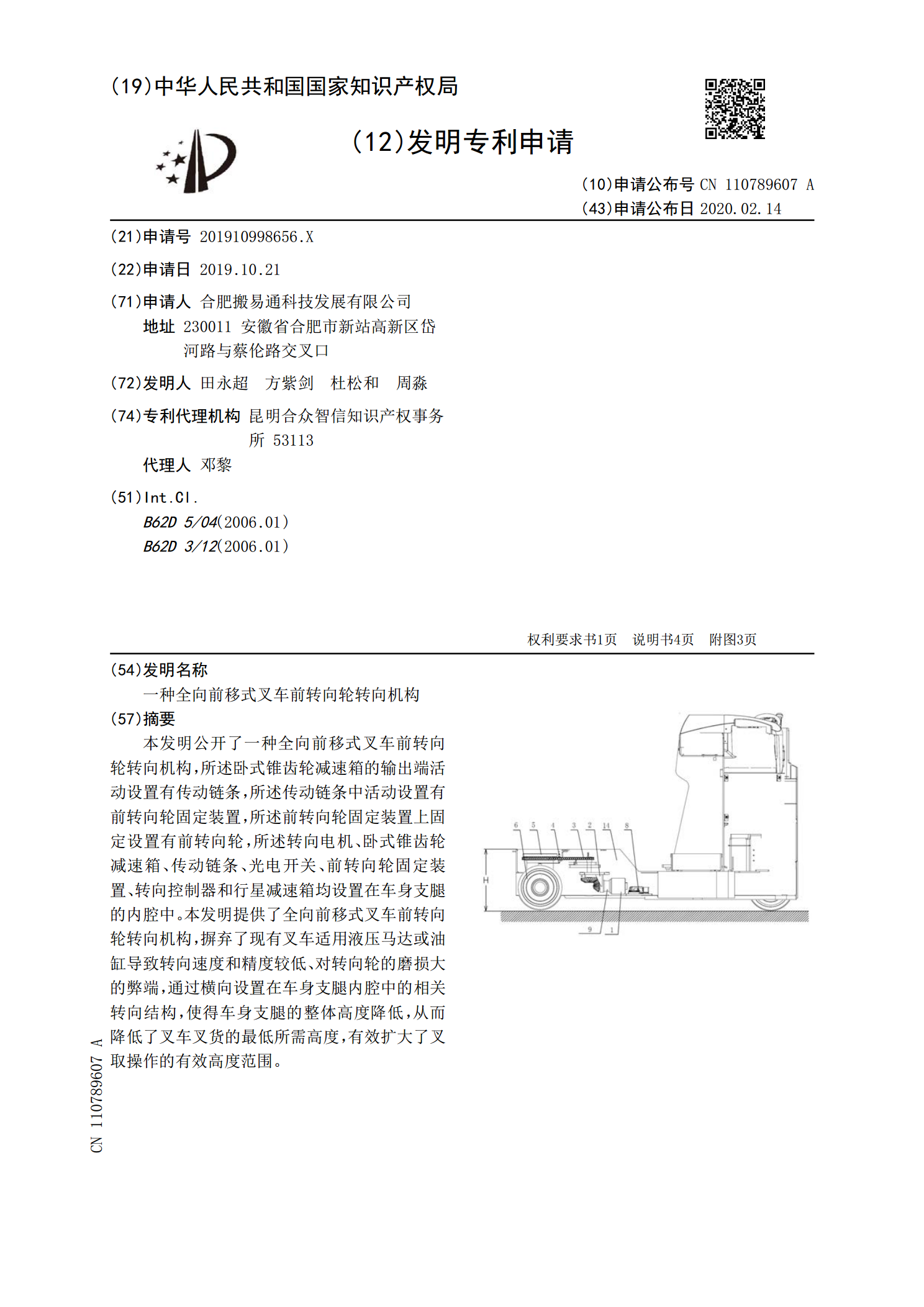
一种全向前移式叉车前转向轮转向机构.pdf
本发明公开了一种全向前移式叉车前转向轮转向机构,所述卧式锥齿轮减速箱的输出端活动设置有传动链条,所述传动链条中活动设置有前转向轮固定装置,所述前转向轮固定装置上固定设置有前转向轮,所述转向电机、卧式锥齿轮减速箱、传动链条、光电开关、前转向轮固定装置、转向控制器和行星减速箱均设置在车身支腿的内腔中。本发明提供了全向前移式叉车前转向轮转向机构,摒弃了现有叉车适用液压马达或油缸导致转向速度和精度较低、对转向轮的磨损大的弊端,通过横向设置在车身支腿内腔中的相关转向结构,使得车身支腿的整体高度降低,从而降低了叉车叉
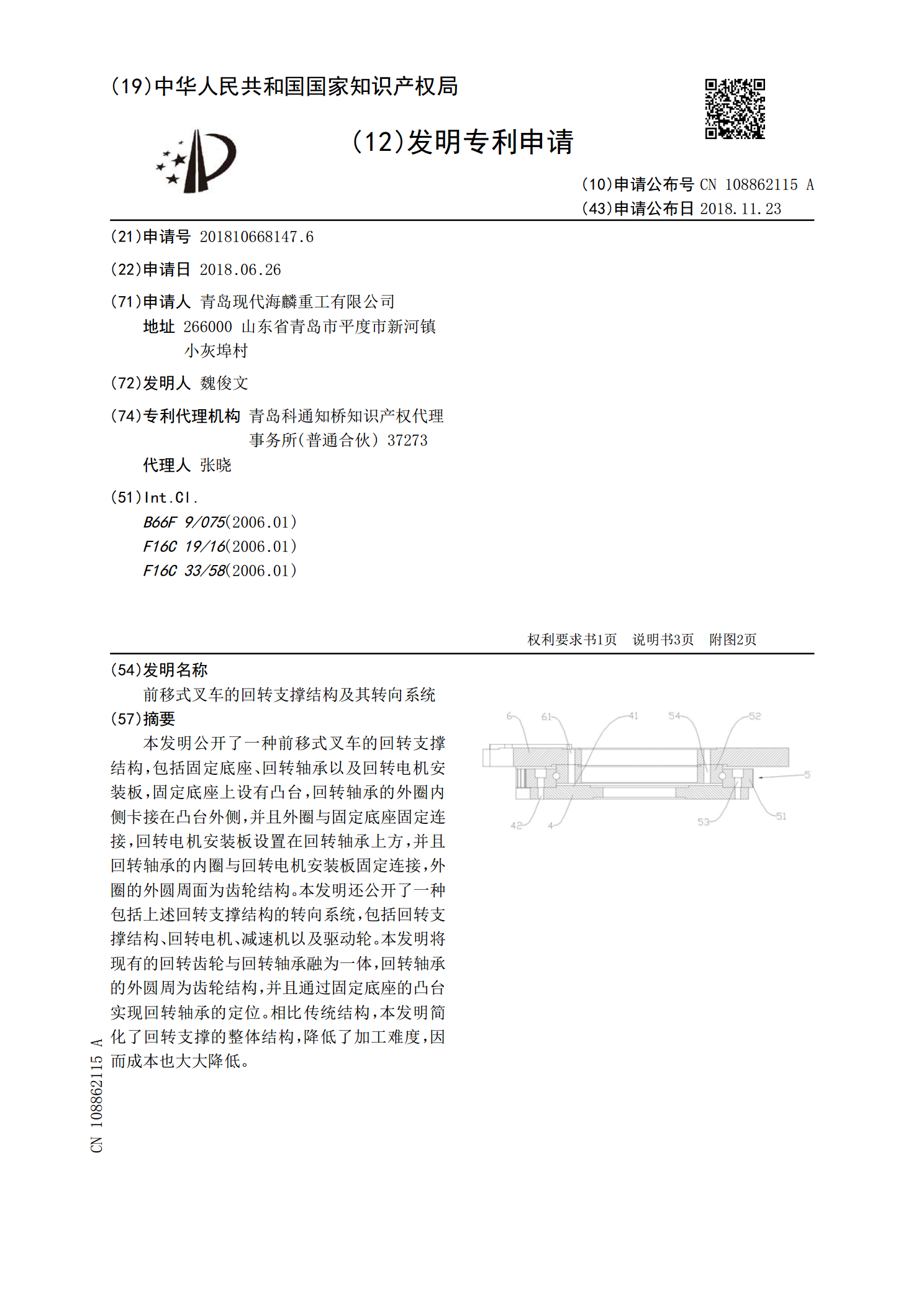
前移式叉车的回转支撑结构及其转向系统.pdf
本发明公开了一种前移式叉车的回转支撑结构,包括固定底座、回转轴承以及回转电机安装板,固定底座上设有凸台,回转轴承的外圈内侧卡接在凸台外侧,并且外圈与固定底座固定连接,回转电机安装板设置在回转轴承上方,并且回转轴承的内圈与回转电机安装板固定连接,外圈的外圆周面为齿轮结构。本发明还公开了一种包括上述回转支撑结构的转向系统,包括回转支撑结构、回转电机、减速机以及驱动轮。本发明将现有的回转齿轮与回转轴承融为一体,回转轴承的外圆周为齿轮结构,并且通过固定底座的凸台实现回转轴承的定位。相比传统结构,本发明简化了回转支
一种前移式叉车电转向方位认知装置及控制方法.pdf
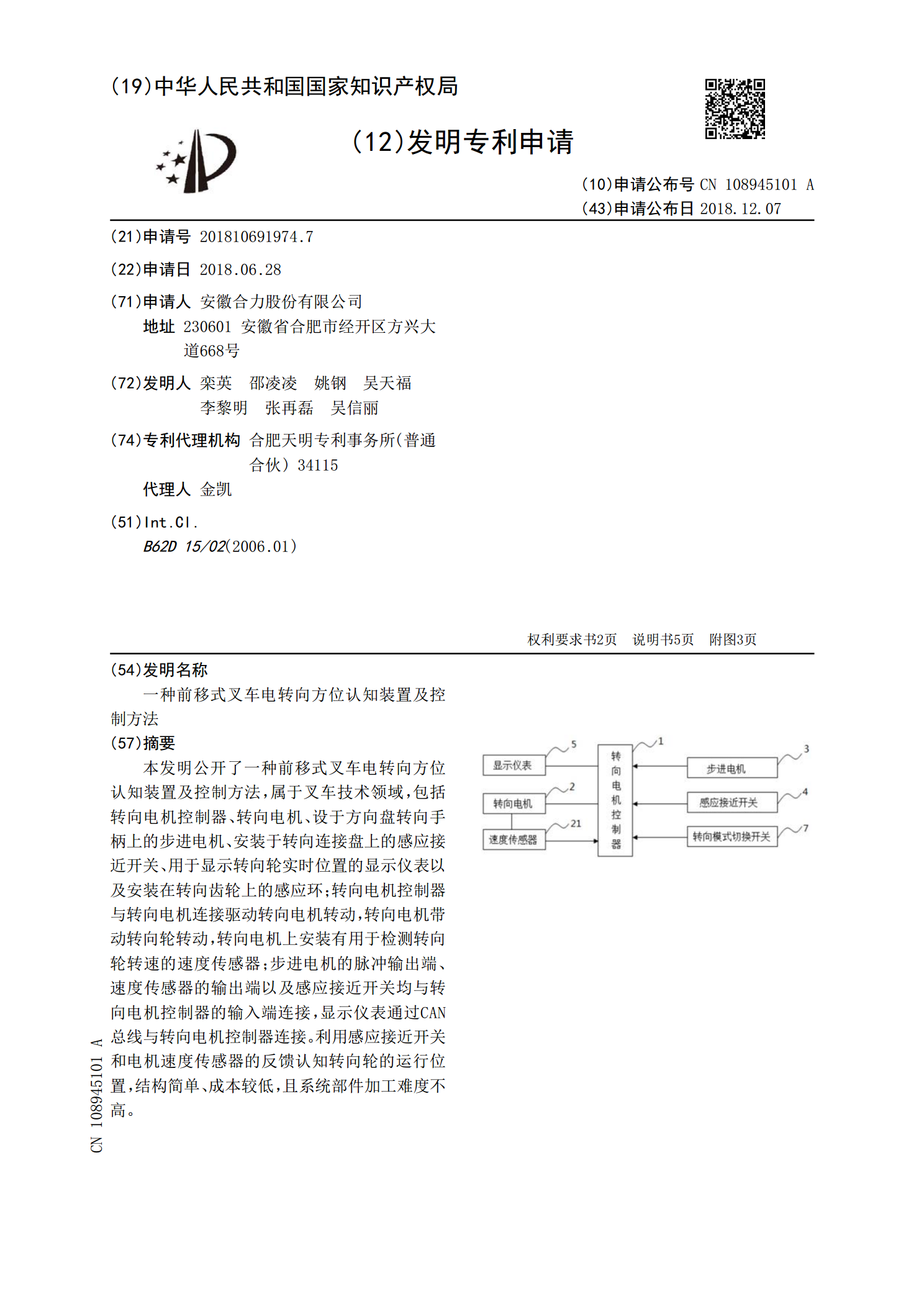
本发明公开了一种前移式叉车电转向方位认知装置及控制方法,属于叉车技术领域,包括转向电机控制器、转向电机、设于方向盘转向手柄上的步进电机、安装于转向连接盘上的感应接近开关、用于显示转向轮实时位置的显示仪表以及安装在转向齿轮上的感应环;转向电机控制器与转向电机连接驱动转向电机转动,转向电机带动转向轮转动,转向电机上安装有用于检测转向轮转速的速度传感器;步进电机的脉冲输出端、速度传感器的输出端以及感应接近开关均与转向电机控制器的输入端连接,显示仪表通过CAN总线与转向电机控制器连接。利用感应接近开关和电机速度传