
车牌矫正方法、装置以及可读存储介质.pdf

增梅****主啊

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车牌矫正方法、装置以及可读存储介质.pdf
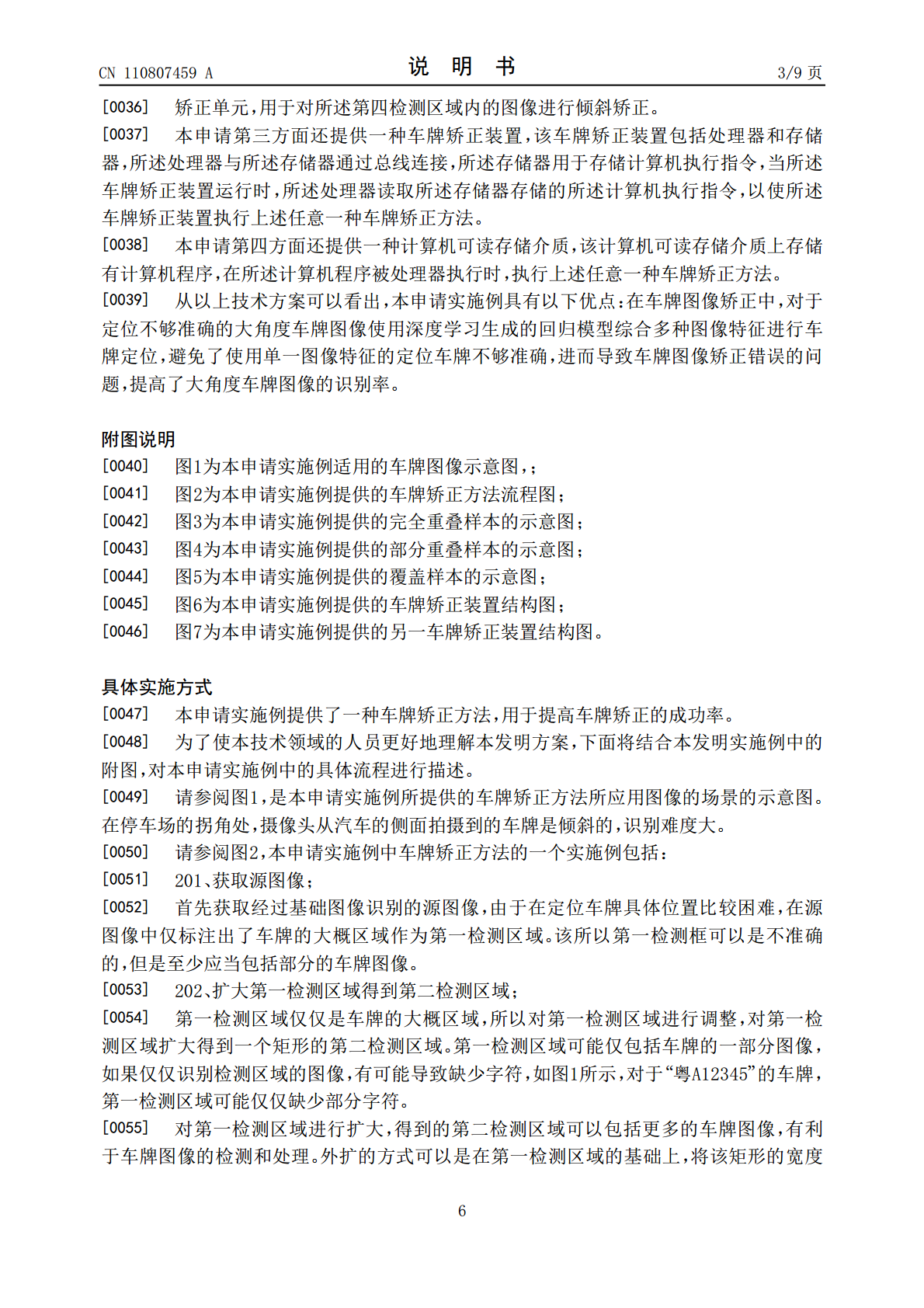
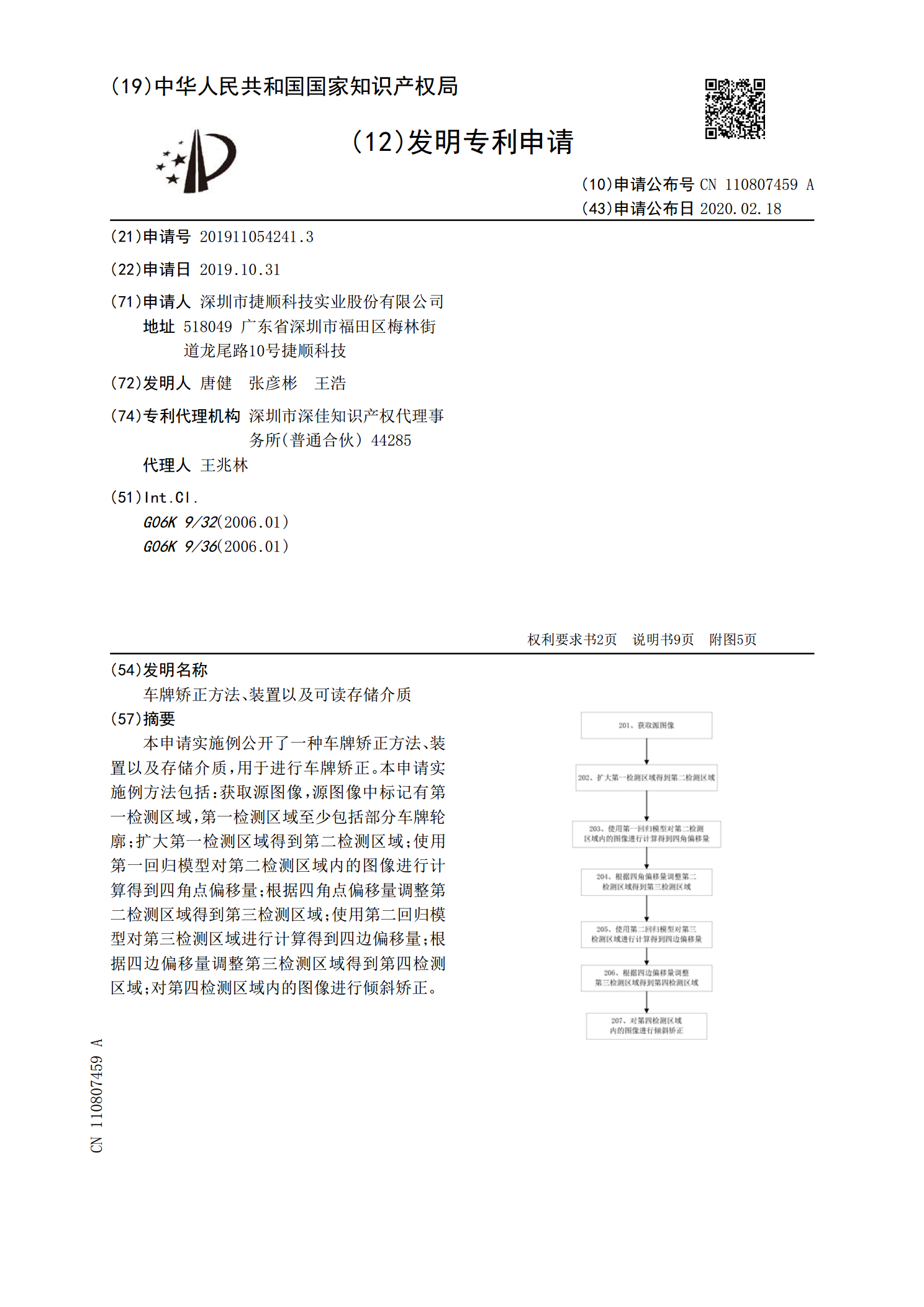
本申请实施例公开了一种车牌矫正方法、装置以及存储介质,用于进行车牌矫正。本申请实施例方法包括:获取源图像,源图像中标记有第一检测区域,第一检测区域至少包括部分车牌轮廓;扩大第一检测区域得到第二检测区域;使用第一回归模型对第二检测区域内的图像进行计算得到四角点偏移量;根据四角点偏移量调整第二检测区域得到第三检测区域;使用第二回归模型对第三检测区域进行计算得到四边偏移量;根据四边偏移量调整第三检测区域得到第四检测区域;对第四检测区域内的图像进行倾斜矫正。
车牌检测方法、车牌检测装置、设备终端和可读存储介质.pdf
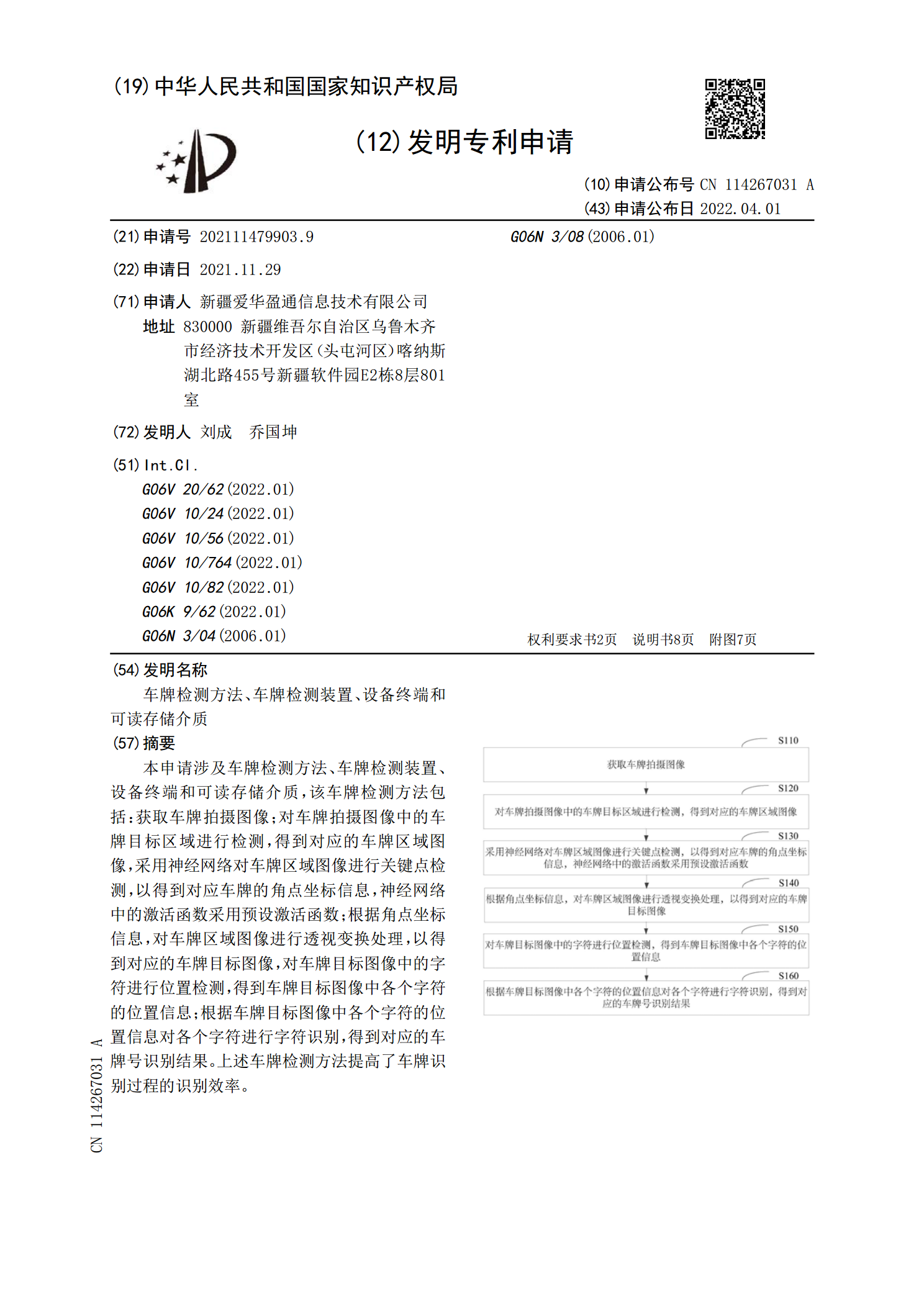
本申请涉及车牌检测方法、车牌检测装置、设备终端和可读存储介质,该车牌检测方法包括:获取车牌拍摄图像;对车牌拍摄图像中的车牌目标区域进行检测,得到对应的车牌区域图像,采用神经网络对车牌区域图像进行关键点检测,以得到对应车牌的角点坐标信息,神经网络中的激活函数采用预设激活函数;根据角点坐标信息,对车牌区域图像进行透视变换处理,以得到对应的车牌目标图像,对车牌目标图像中的字符进行位置检测,得到车牌目标图像中各个字符的位置信息;根据车牌目标图像中各个字符的位置信息对各个字符进行字符识别,得到对应的车牌号识别结果。
页面选择方法、装置以及可读存储介质.pdf
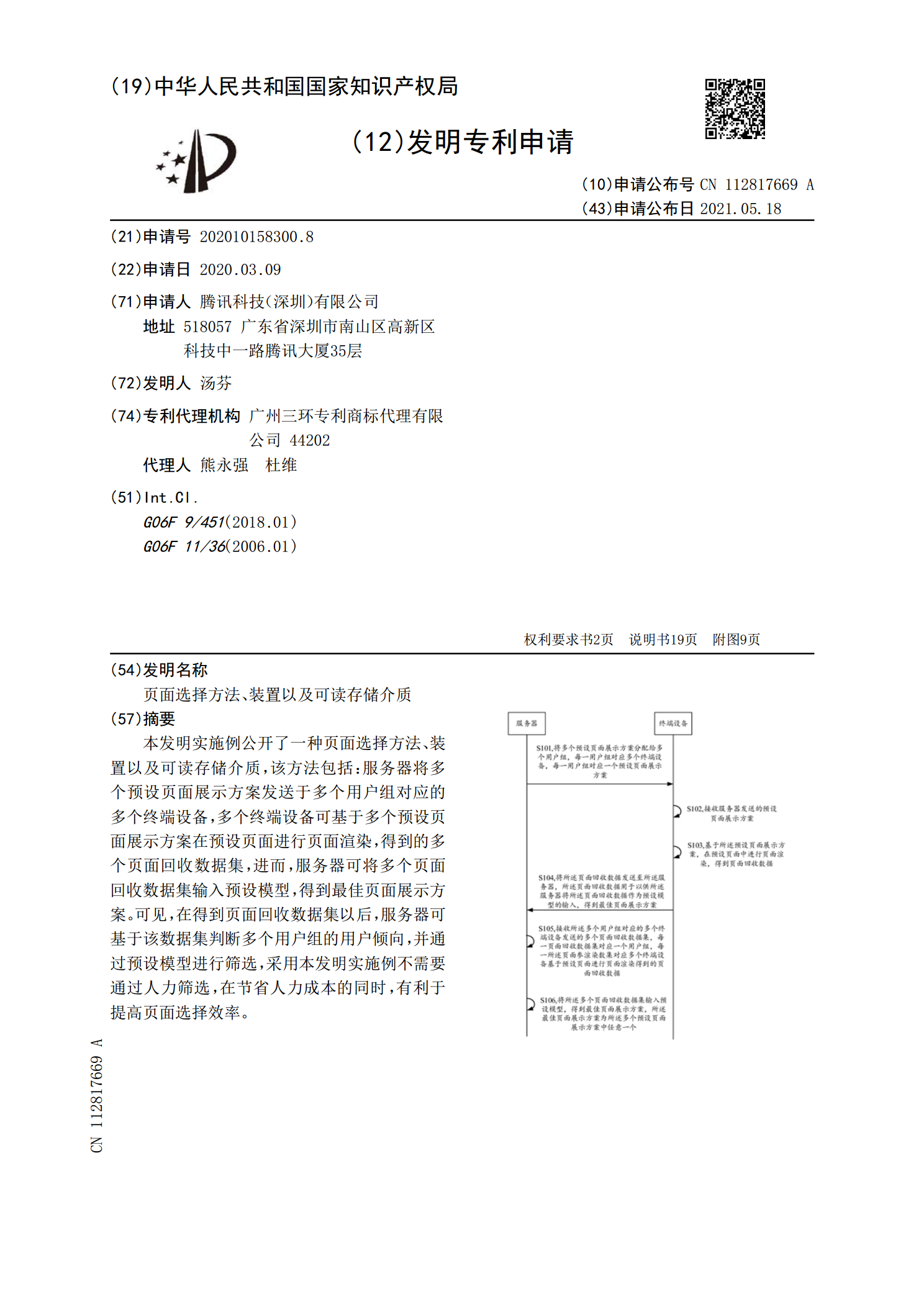
本发明实施例公开了一种页面选择方法、装置以及可读存储介质,该方法包括:服务器将多个预设页面展示方案发送于多个用户组对应的多个终端设备,多个终端设备可基于多个预设页面展示方案在预设页面进行页面渲染,得到的多个页面回收数据集,进而,服务器可将多个页面回收数据集输入预设模型,得到最佳页面展示方案。可见,在得到页面回收数据集以后,服务器可基于该数据集判断多个用户组的用户倾向,并通过预设模型进行筛选,采用本发明实施例不需要通过人力筛选,在节省人力成本的同时,有利于提高页面选择效率。
数据导出方法、装置、终端以及可读存储介质.pdf
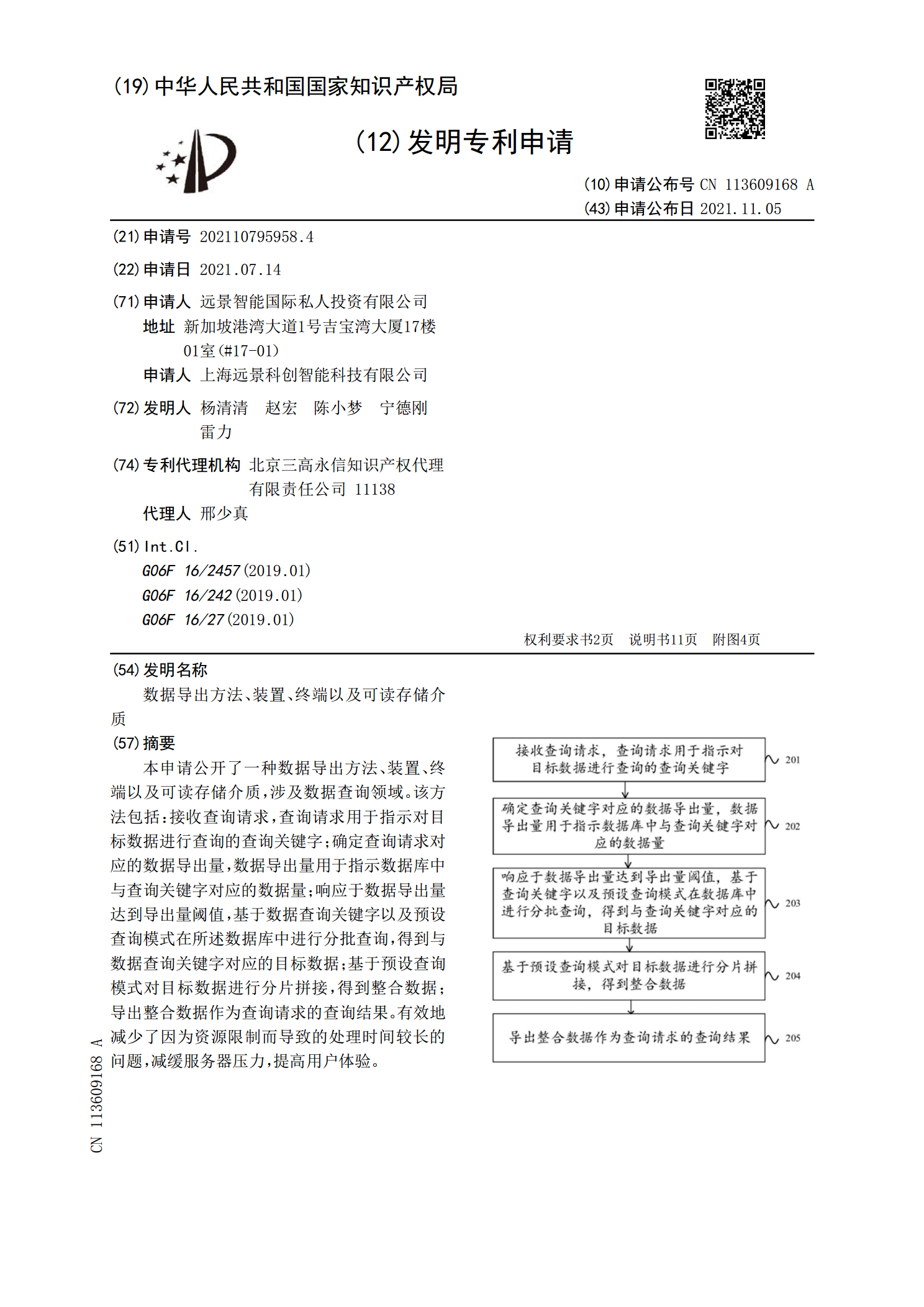
本申请公开了一种数据导出方法、装置、终端以及可读存储介质,涉及数据查询领域。该方法包括:接收查询请求,查询请求用于指示对目标数据进行查询的查询关键字;确定查询请求对应的数据导出量,数据导出量用于指示数据库中与查询关键字对应的数据量;响应于数据导出量达到导出量阈值,基于数据查询关键字以及预设查询模式在所述数据库中进行分批查询,得到与数据查询关键字对应的目标数据;基于预设查询模式对目标数据进行分片拼接,得到整合数据;导出整合数据作为查询请求的查询结果。有效地减少了因为资源限制而导致的处理时间较长的问题,减缓服
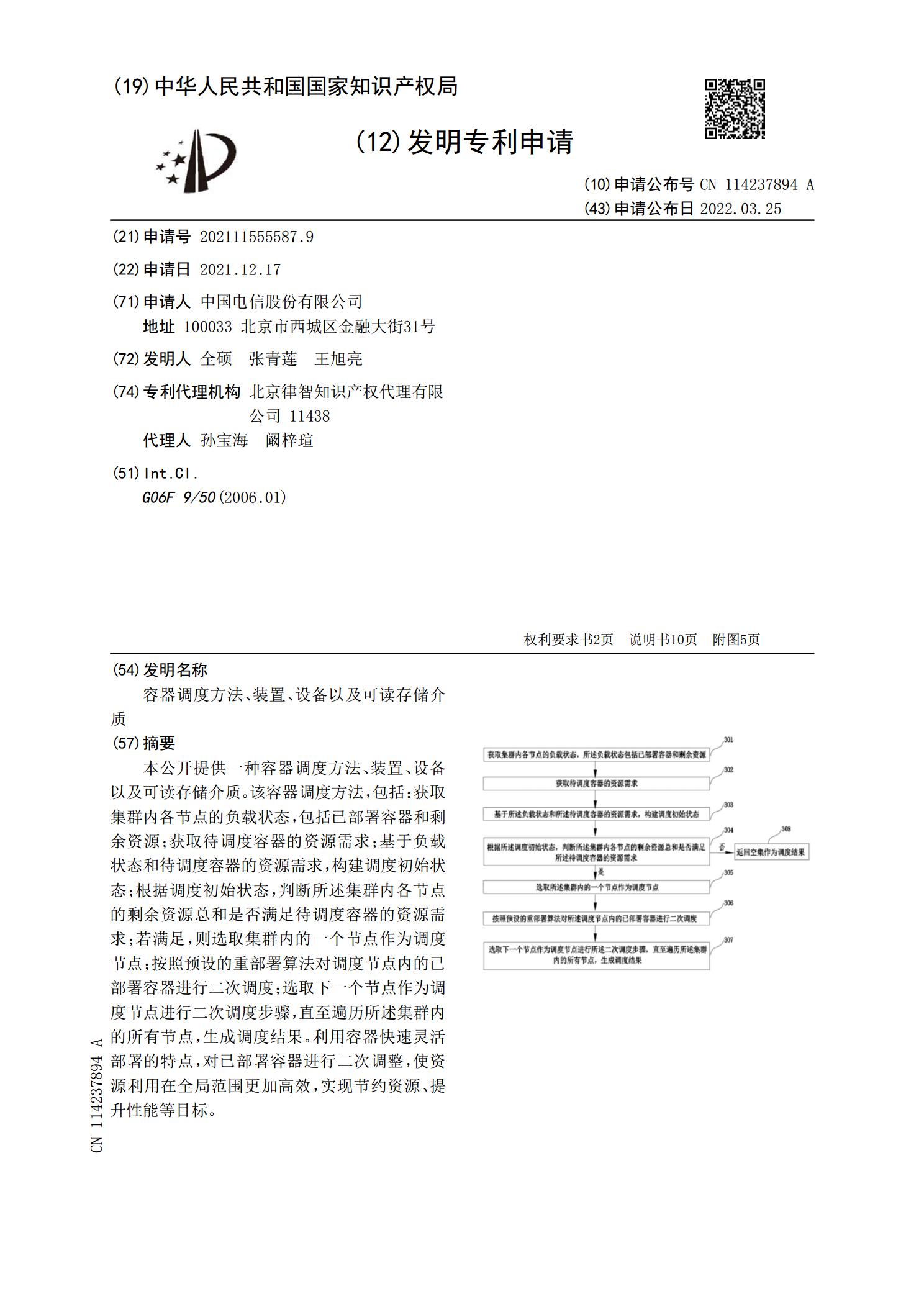
容器调度方法、装置、设备以及可读存储介质.pdf
本公开提供一种容器调度方法、装置、设备以及可读存储介质。该容器调度方法,包括:获取集群内各节点的负载状态,包括已部署容器和剩余资源;获取待调度容器的资源需求;基于负载状态和待调度容器的资源需求,构建调度初始状态;根据调度初始状态,判断所述集群内各节点的剩余资源总和是否满足待调度容器的资源需求;若满足,则选取集群内的一个节点作为调度节点;按照预设的重部署算法对调度节点内的已部署容器进行二次调度;选取下一个节点作为调度节点进行二次调度步骤,直至遍历所述集群内的所有节点,生成调度结果。利用容器快速灵活部署的特点