
一种用于折弯机的自动送料结构以及送料方法.pdf

白凡****12


1/9
2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于折弯机的自动送料结构以及送料方法.pdf
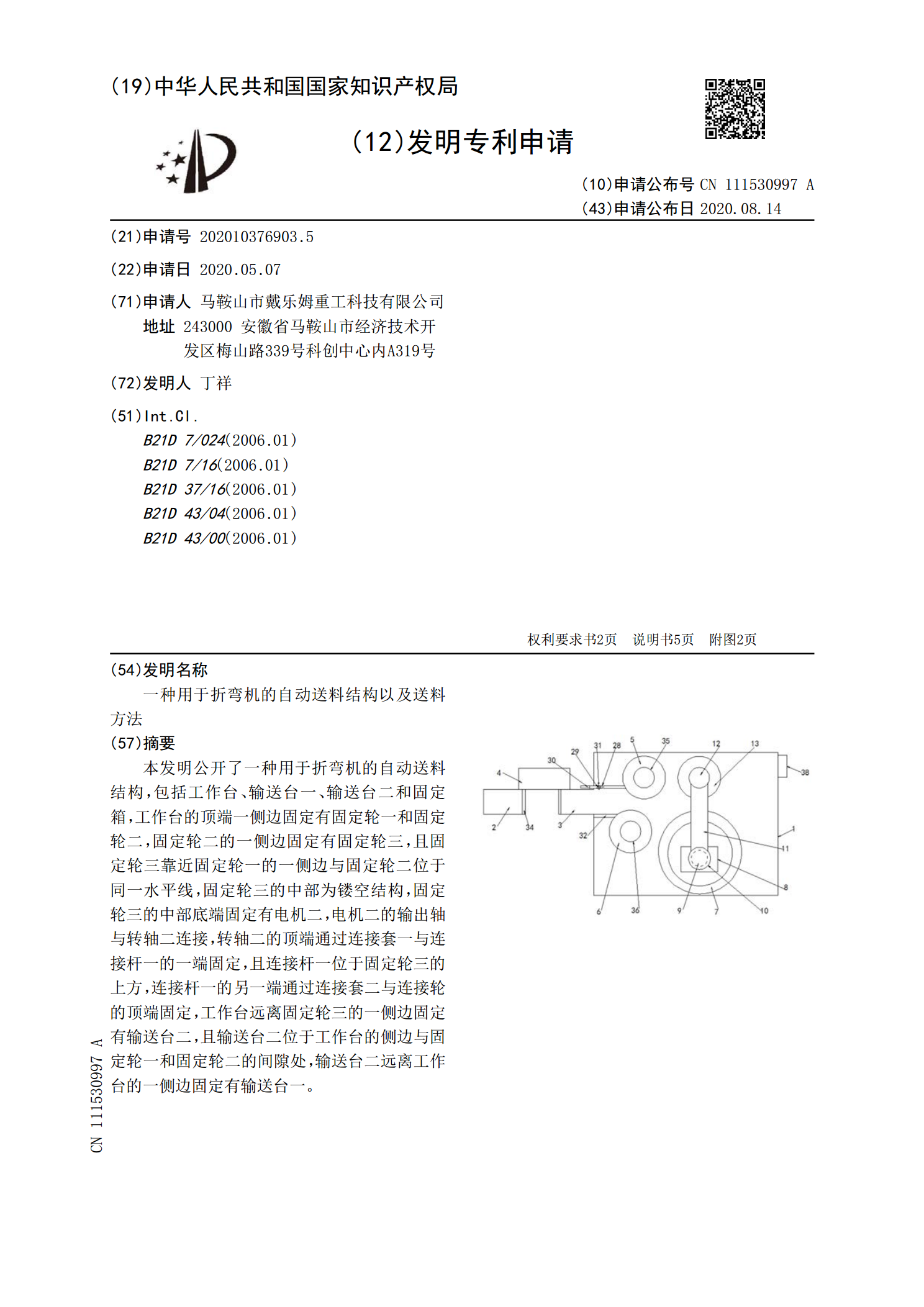
本发明公开了一种用于折弯机的自动送料结构,包括工作台、输送台一、输送台二和固定箱,工作台的顶端一侧边固定有固定轮一和固定轮二,固定轮二的一侧边固定有固定轮三,且固定轮三靠近固定轮一的一侧边与固定轮二位于同一水平线,固定轮三的中部为镂空结构,固定轮三的中部底端固定有电机二,电机二的输出轴与转轴二连接,转轴二的顶端通过连接套一与连接杆一的一端固定,且连接杆一位于固定轮三的上方,连接杆一的另一端通过连接套二与连接轮的顶端固定,工作台远离固定轮三的一侧边固定有输送台二,且输送台二位于工作台的侧边与固定轮一和固定轮

一种用于折弯机的自动送料结构以及送料方法.pdf
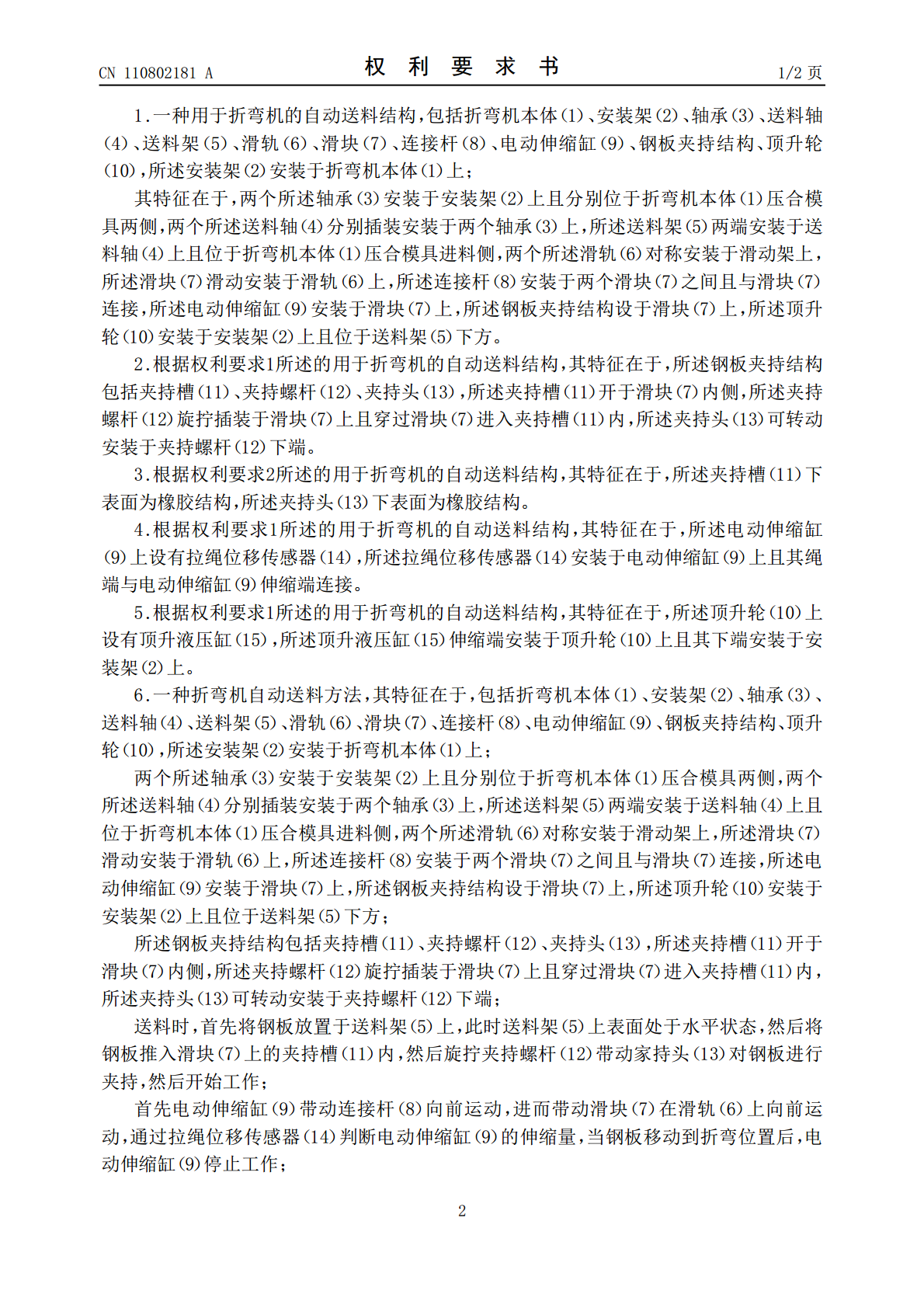
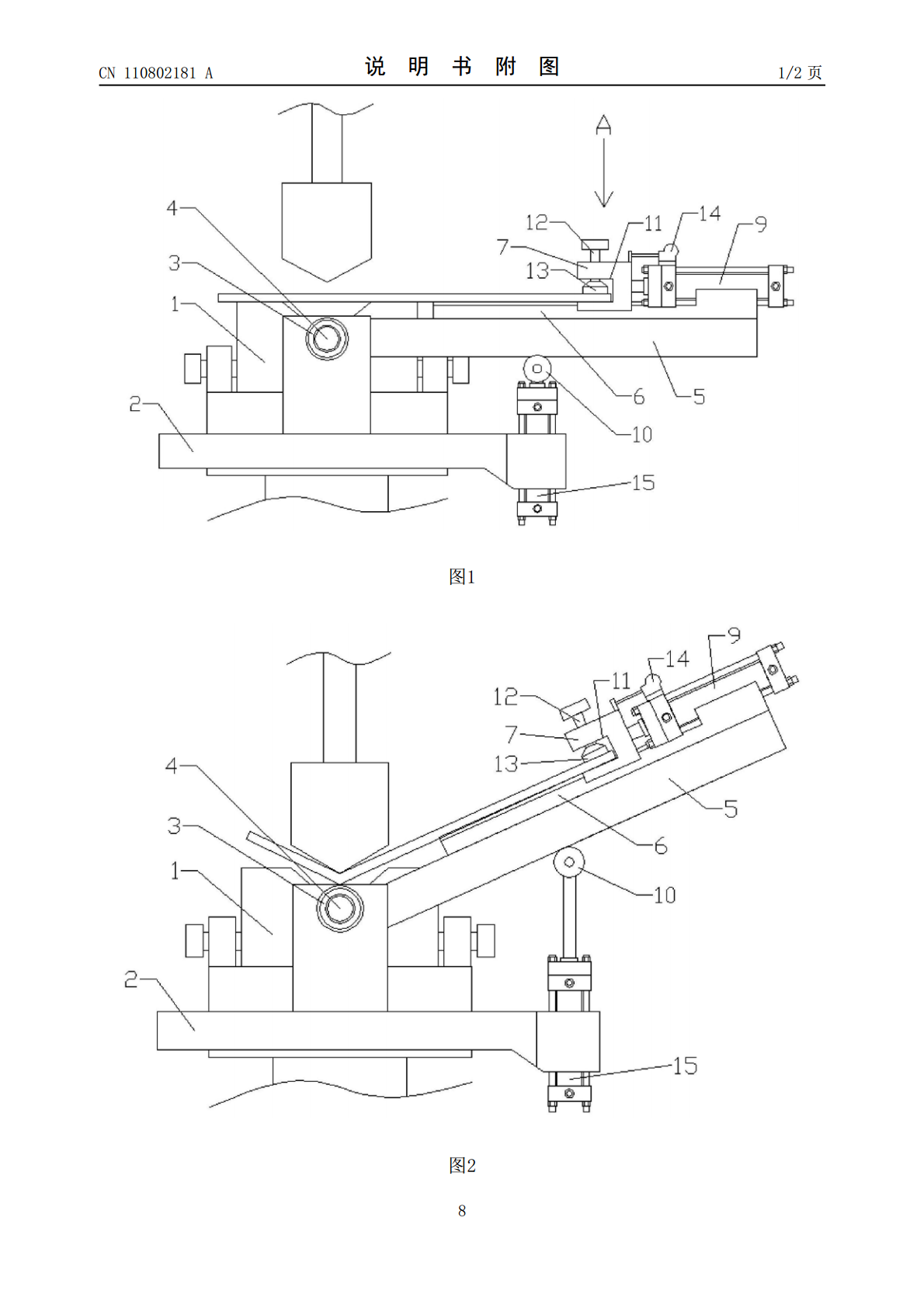
本发明公开了一种用于折弯机的自动送料结构以及送料方法,属于折弯机配套领域,包括折弯机本体、安装架、轴承、送料轴、送料架、滑轨、滑块、连接杆、电动伸缩缸、钢板夹持结构、顶升轮。发明通过可转动的送料轴,在折弯机本体对钢板就行折弯时,送料架可以随着钢板转动,进而实现利用钢板夹持结构对钢板进行夹持,利用电动伸缩缸可带动滑块向前移动,进而带动钢板向前移动,当移动到折弯位置时停止移动折弯机本体开始折弯,本进料结构可带动钢板进行多次折弯,进而节省了工作人员劳动强度。

一种自动送料的折弯机.pdf
本发明公开了一种自动送料的折弯机,属于机械加工技术领域,包括机架、上折弯件、下折弯件和送料机构,下折弯件固定设置,上折弯件上下滑动设置;下折弯件的上方对应设有压料板,压料板上下滑动设置;上折弯件包括顶块和滑移压板,顶块上下滑动设置,滑移压板位于顶块的下表面,且沿进料方向往复滑动设置,滑移压板配设有滑动驱动装置;滑移压板的靠近下折弯件的一侧转动设置有滚轮,滚轮与下折弯件之间留有折弯间隙;送料机构包括主动滚筒和位于主动滚筒上方的从动滚筒,从动滚筒连接有升降驱动装置。不仅保证了折弯的精度,提高了效率,简单实用,
自动送料系统及其自动送料方法.pdf
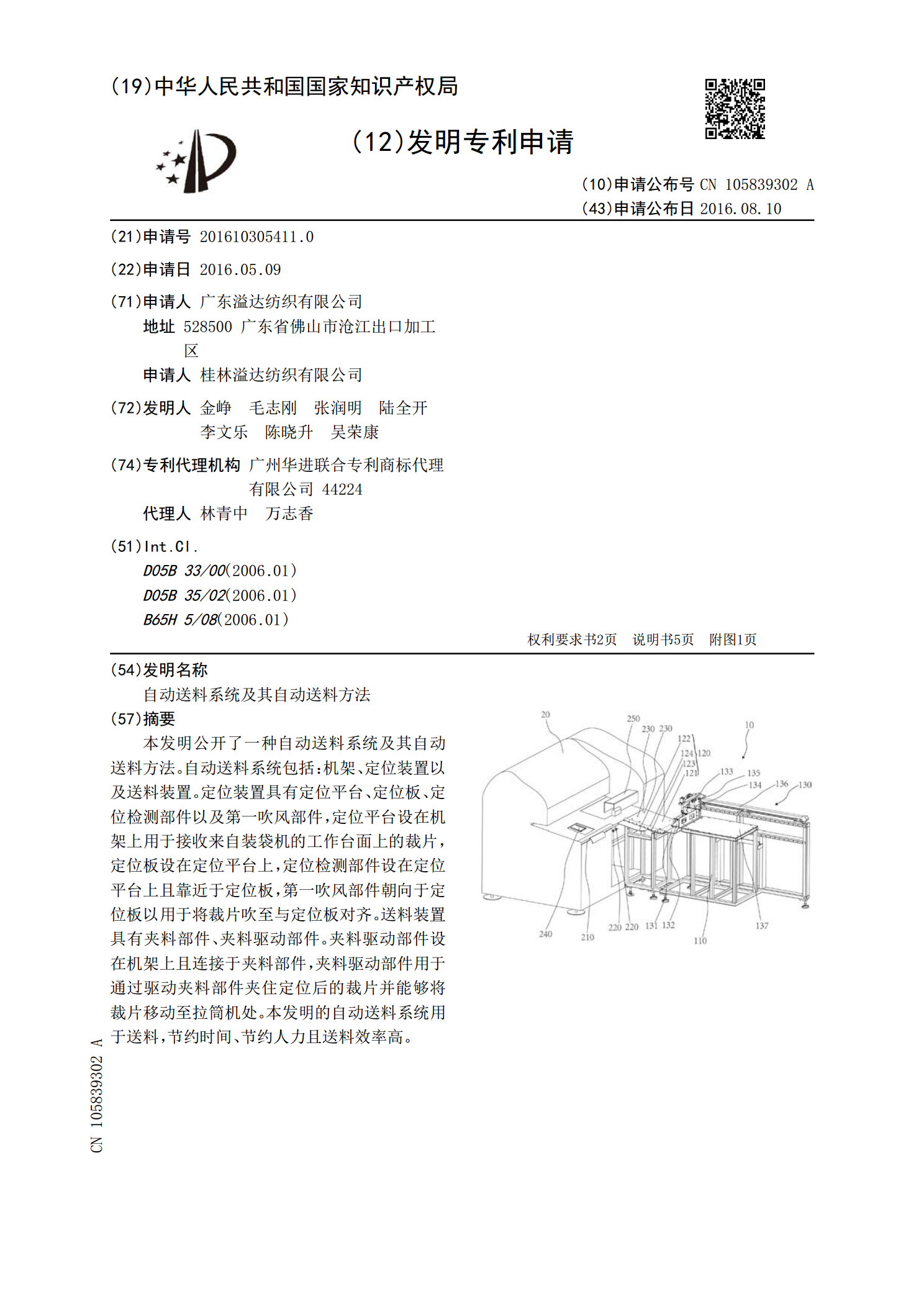
本发明公开了一种自动送料系统及其自动送料方法。自动送料系统包括:机架、定位装置以及送料装置。定位装置具有定位平台、定位板、定位检测部件以及第一吹风部件,定位平台设在机架上用于接收来自装袋机的工作台面上的裁片,定位板设在定位平台上,定位检测部件设在定位平台上且靠近于定位板,第一吹风部件朝向于定位板以用于将裁片吹至与定位板对齐。送料装置具有夹料部件、夹料驱动部件。夹料驱动部件设在机架上且连接于夹料部件,夹料驱动部件用于通过驱动夹料部件夹住定位后的裁片并能够将裁片移动至拉筒机处。本发明的自动送料系统用于送料,节
一种折弯机自动送料装置.pdf
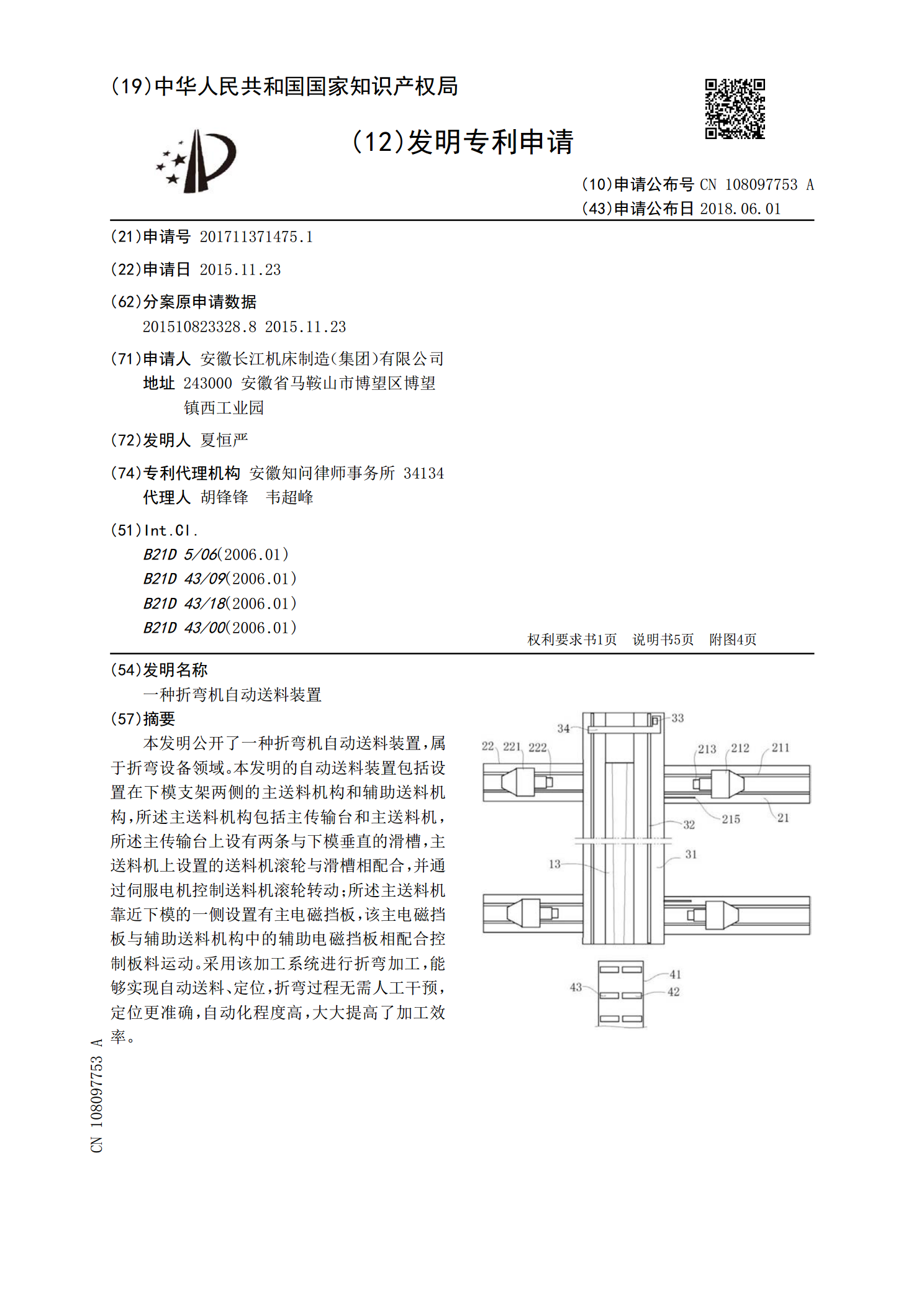
本发明公开了一种折弯机自动送料装置,属于折弯设备领域。本发明的自动送料装置包括设置在下模支架两侧的主送料机构和辅助送料机构,所述主送料机构包括主传输台和主送料机,所述主传输台上设有两条与下模垂直的滑槽,主送料机上设置的送料机滚轮与滑槽相配合,并通过伺服电机控制送料机滚轮转动;所述主送料机靠近下模的一侧设置有主电磁挡板,该主电磁挡板与辅助送料机构中的辅助电磁挡板相配合控制板料运动。采用该加工系统进行折弯加工,能够实现自动送料、定位,折弯过程无需人工干预,定位更准确,自动化程度高,大大提高了加工效率。