
钢轨轮廓的定位方法及装置.pdf

朋兴****en

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
钢轨轮廓的定位方法及装置.pdf
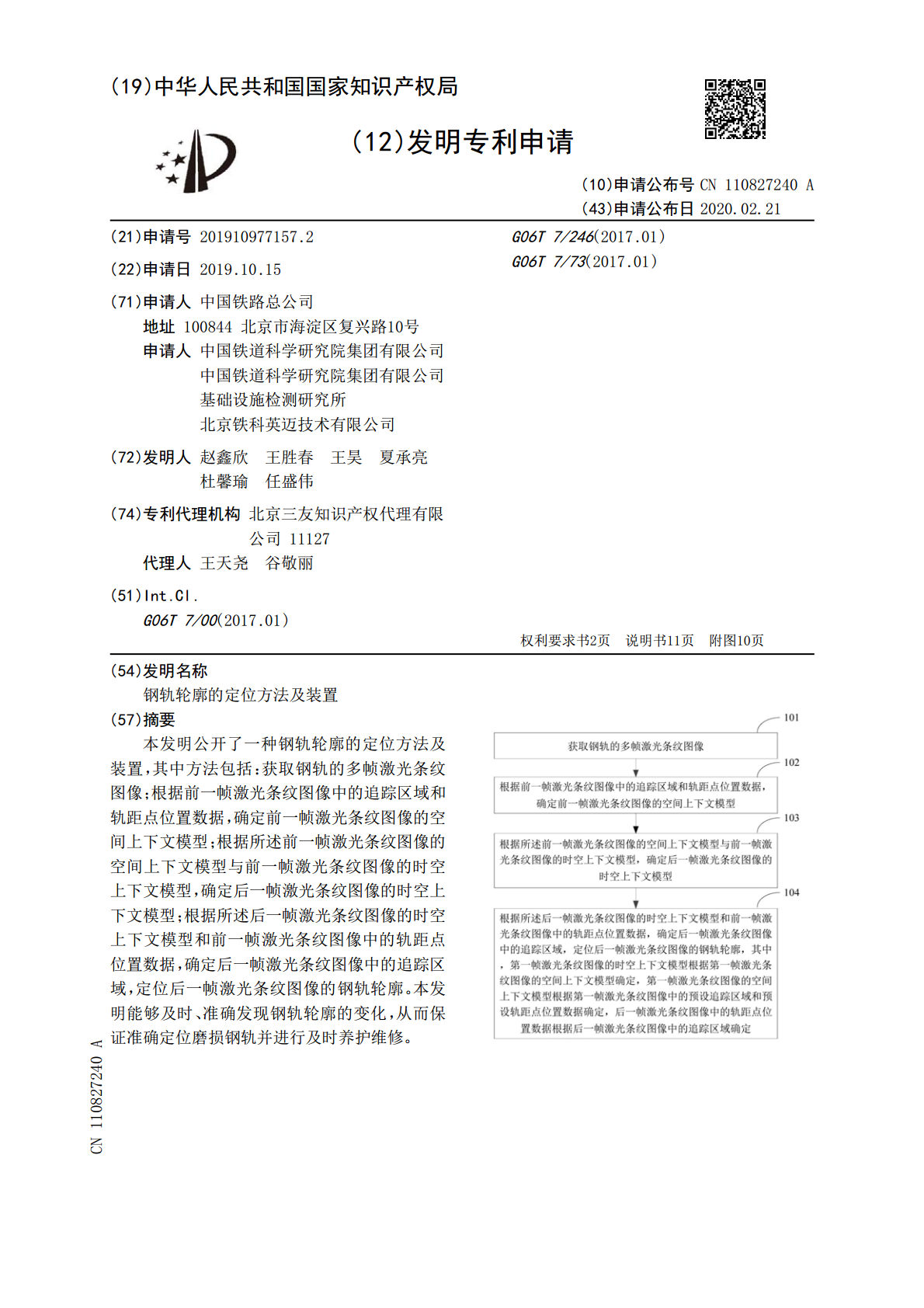
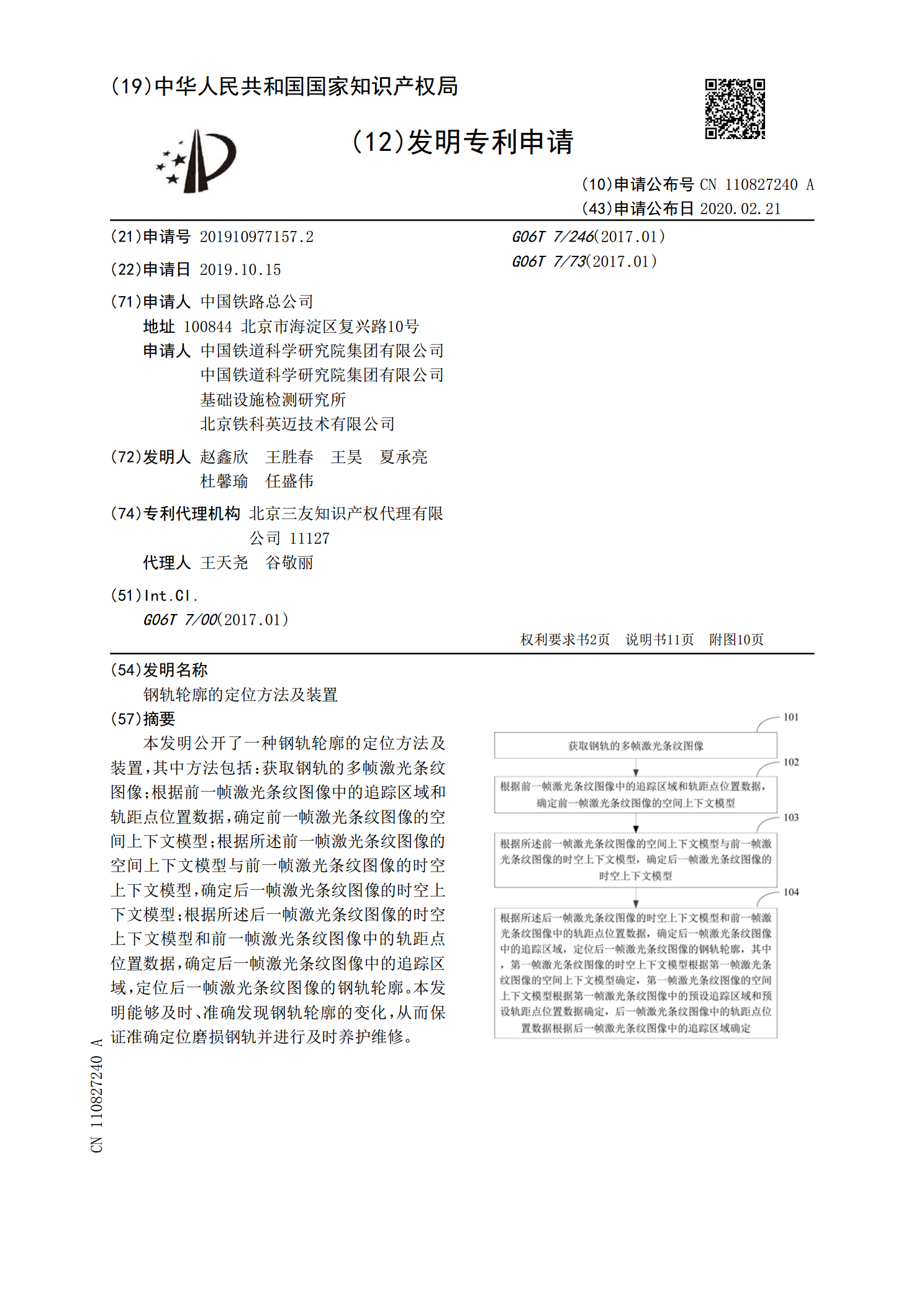
本发明公开了一种钢轨轮廓的定位方法及装置,其中方法包括:获取钢轨的多帧激光条纹图像;根据前一帧激光条纹图像中的追踪区域和轨距点位置数据,确定前一帧激光条纹图像的空间上下文模型;根据所述前一帧激光条纹图像的空间上下文模型与前一帧激光条纹图像的时空上下文模型,确定后一帧激光条纹图像的时空上下文模型;根据所述后一帧激光条纹图像的时空上下文模型和前一帧激光条纹图像中的轨距点位置数据,确定后一帧激光条纹图像中的追踪区域,定位后一帧激光条纹图像的钢轨轮廓。本发明能够及时、准确发现钢轨轮廓的变化,从而保证准确定位磨损钢
轮廓点定位方法及装置.pdf
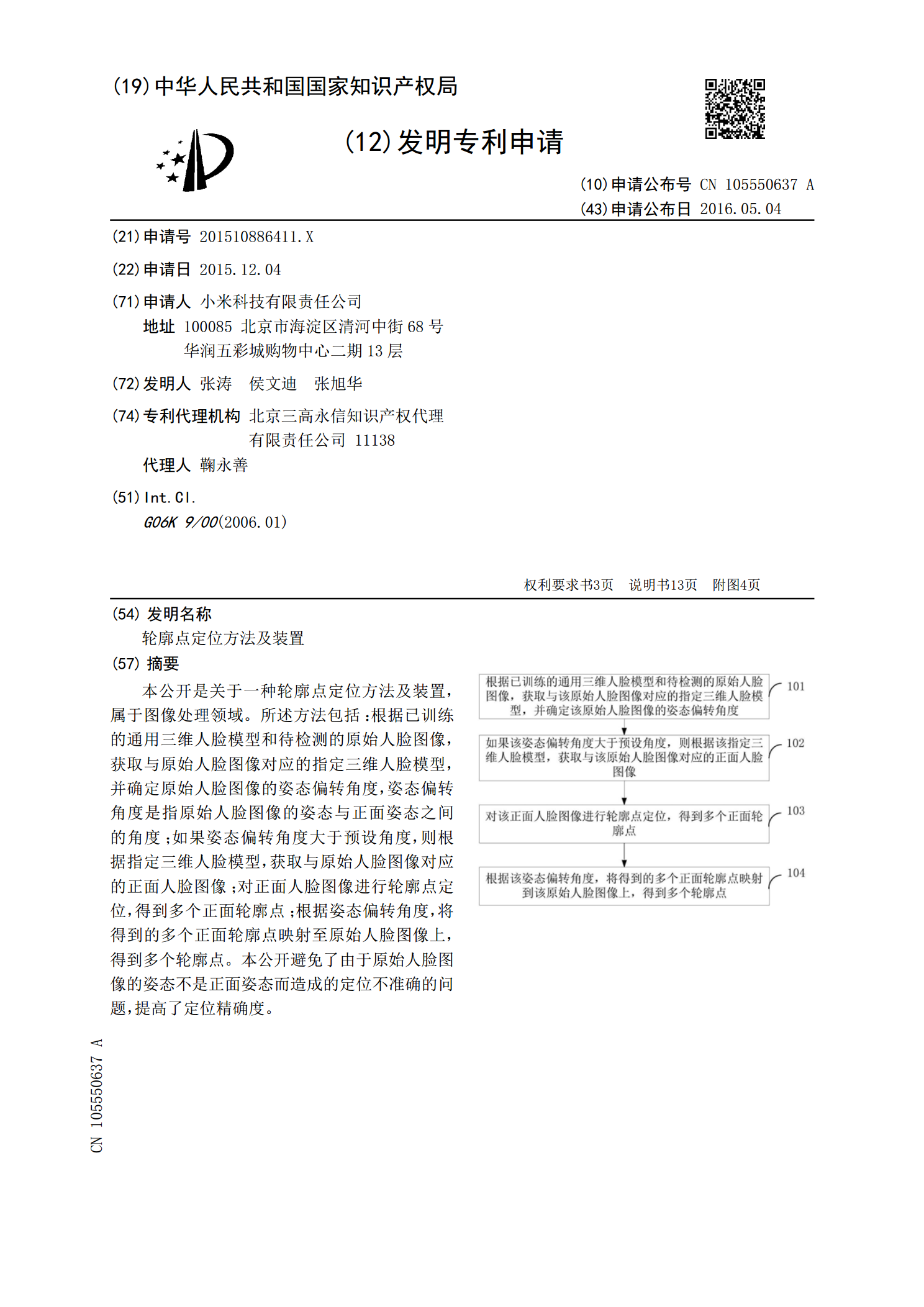
本公开是关于一种轮廓点定位方法及装置,属于图像处理领域。所述方法包括:根据已训练的通用三维人脸模型和待检测的原始人脸图像,获取与原始人脸图像对应的指定三维人脸模型,并确定原始人脸图像的姿态偏转角度,姿态偏转角度是指原始人脸图像的姿态与正面姿态之间的角度;如果姿态偏转角度大于预设角度,则根据指定三维人脸模型,获取与原始人脸图像对应的正面人脸图像;对正面人脸图像进行轮廓点定位,得到多个正面轮廓点;根据姿态偏转角度,将得到的多个正面轮廓点映射至原始人脸图像上,得到多个轮廓点。本公开避免了由于原始人脸图像的姿态不

自动测量钢轨轮廓的检测装置和检测方法.pdf
本发明提供一种自动测量钢轨轮廓的检测装置和检测方法。所述检测装置包括电源模块、机械传动模块、数据采集存储模块和显示报警模块,机械传动模块包括机架、导轨、同步带和用于控制钢轨运动的光电开关,钢轨在检测期间设置在机架上。检测装置还包括多个可移动激光轮廓传感器和位移传感器,多个可移动激光轮廓传感器环绕钢轨设置以测量钢轨的断面二维坐标数据,位移传感器沿着平行于钢轨的长度方向的方向设置在机架上以测量可移动激光轮廓传感器的位移数据。根据本发明的检测装置和检测方法通过结合可移动激光轮廓传感器和位移传感器能够实现钢轨的断
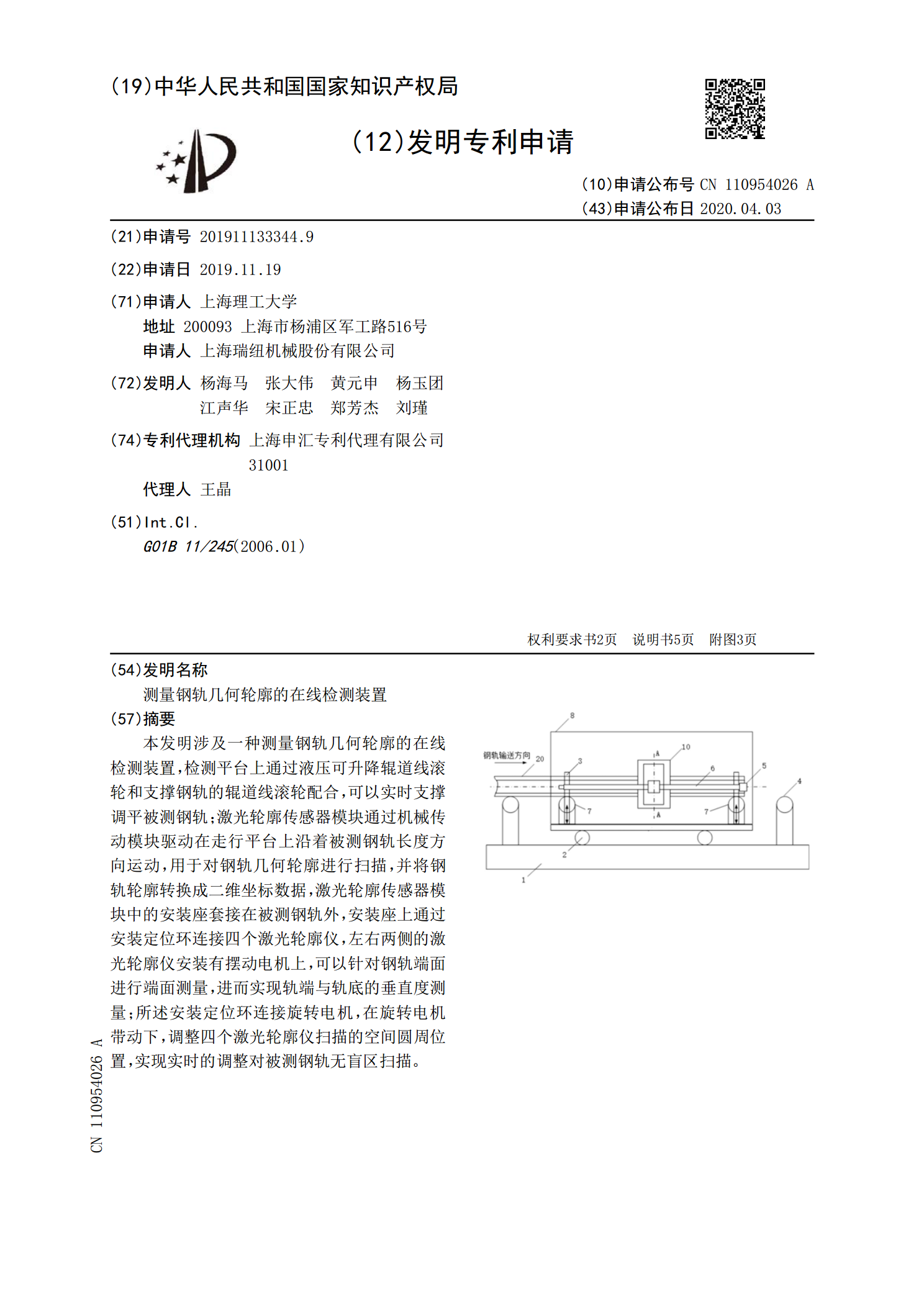
测量钢轨几何轮廓的在线检测装置.pdf
本发明涉及一种测量钢轨几何轮廓的在线检测装置,检测平台上通过液压可升降辊道线滚轮和支撑钢轨的辊道线滚轮配合,可以实时支撑调平被测钢轨;激光轮廓传感器模块通过机械传动模块驱动在走行平台上沿着被测钢轨长度方向运动,用于对钢轨几何轮廓进行扫描,并将钢轨轮廓转换成二维坐标数据,激光轮廓传感器模块中的安装座套接在被测钢轨外,安装座上通过安装定位环连接四个激光轮廓仪,左右两侧的激光轮廓仪安装有摆动电机上,可以针对钢轨端面进行端面测量,进而实现轨端与轨底的垂直度测量;所述安装定位环连接旋转电机,在旋转电机带动下,调整四
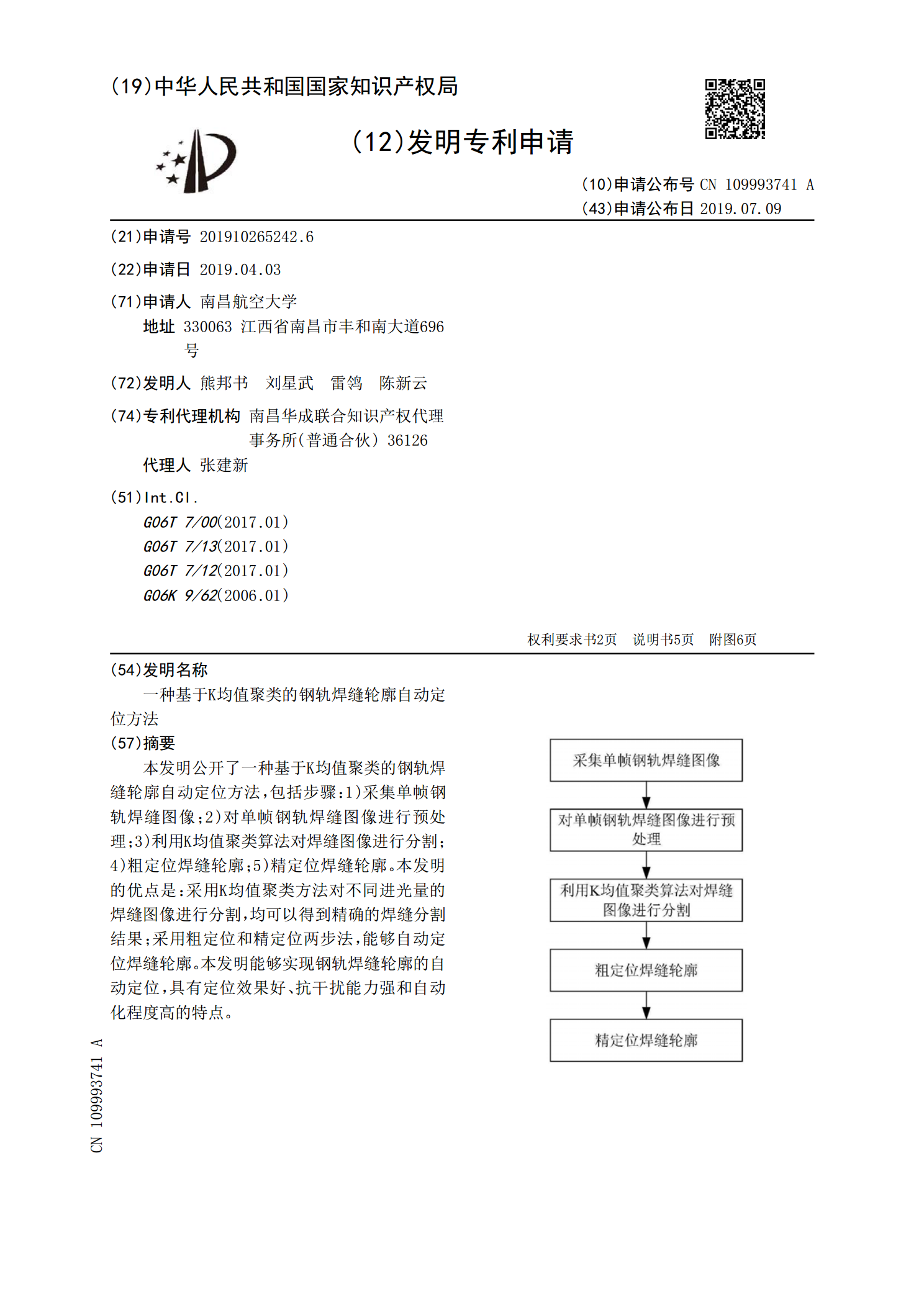
一种基于K均值聚类的钢轨焊缝轮廓自动定位方法.pdf
本发明公开了一种基于K均值聚类的钢轨焊缝轮廓自动定位方法,包括步骤:1)采集单帧钢轨焊缝图像;2)对单帧钢轨焊缝图像进行预处理;3)利用K均值聚类算法对焊缝图像进行分割;4)粗定位焊缝轮廓;5)精定位焊缝轮廓。本发明的优点是:采用K均值聚类方法对不同进光量的焊缝图像进行分割,均可以得到精确的焊缝分割结果;采用粗定位和精定位两步法,能够自动定位焊缝轮廓。本发明能够实现钢轨焊缝轮廓的自动定位,具有定位效果好、抗干扰能力强和自动化程度高的特点。