
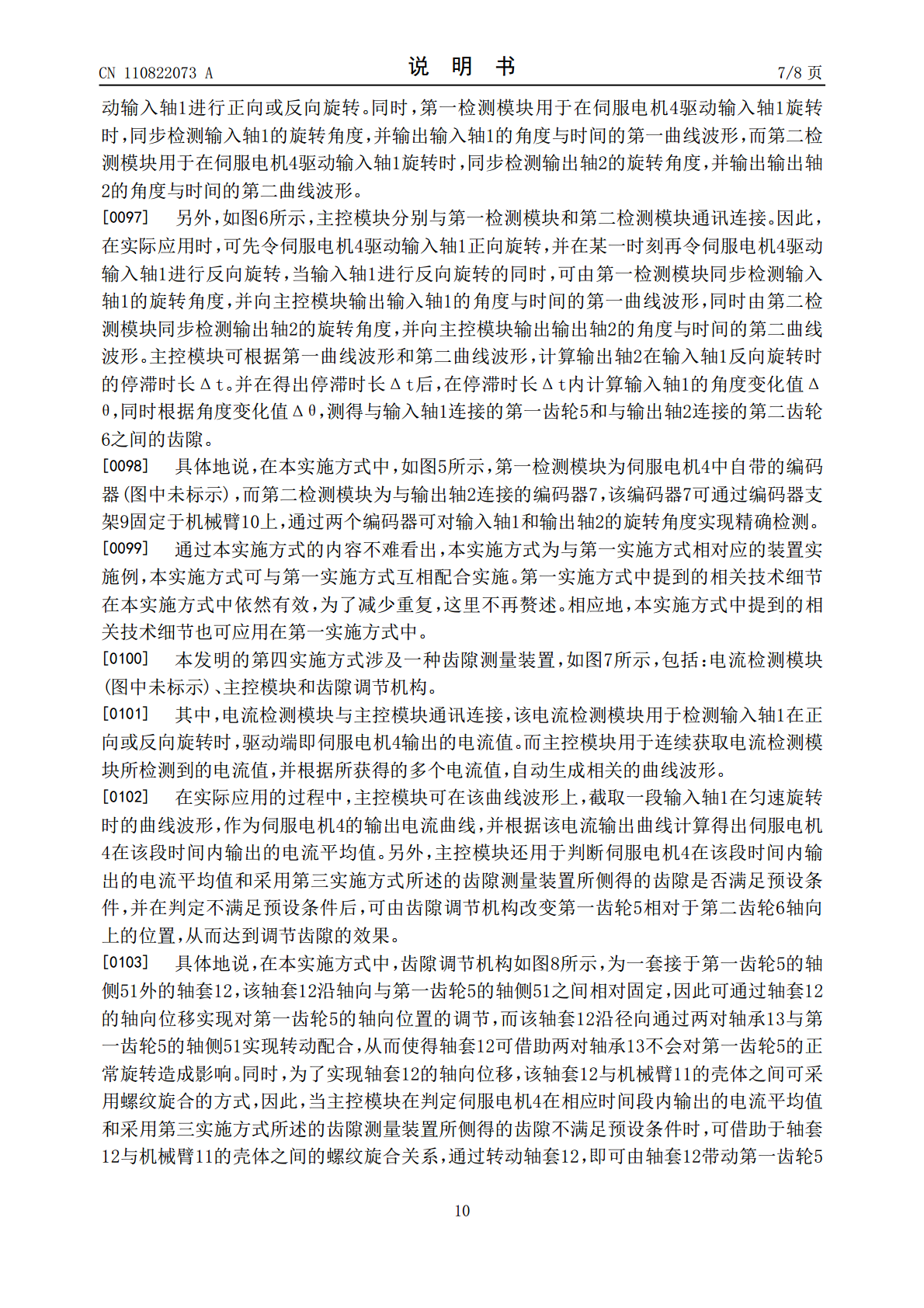
齿隙测量及调节方法、齿隙测量及调节装置.pdf

猫巷****奕声

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

齿隙测量及调节方法、齿隙测量及调节装置.pdf
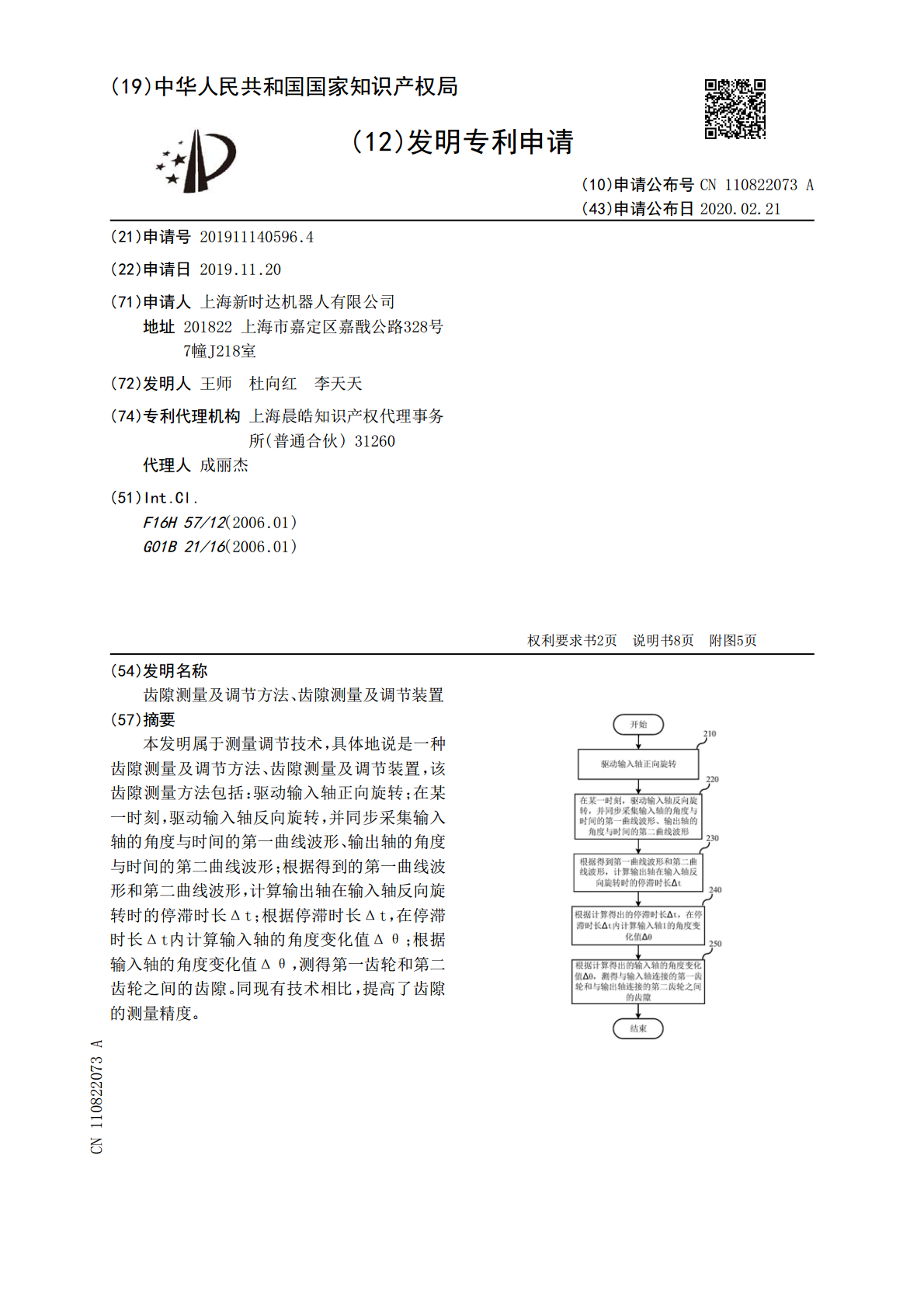
本发明属于测量调节技术,具体地说是一种齿隙测量及调节方法、齿隙测量及调节装置,该齿隙测量方法包括:驱动输入轴正向旋转;在某一时刻,驱动输入轴反向旋转,并同步采集输入轴的角度与时间的第一曲线波形、输出轴的角度与时间的第二曲线波形;根据得到的第一曲线波形和第二曲线波形,计算输出轴在输入轴反向旋转时的停滞时长Δt;根据停滞时长Δt,在停滞时长Δt内计算输入轴的角度变化值Δθ;根据输入轴的角度变化值Δθ,测得第一齿轮和第二齿轮之间的齿隙。同现有技术相比,提高了齿隙的测量精度。

用于调节齿侧隙的方法.pdf
本发明涉及一种用于调节驱动装置(1)中的齿侧隙、特别是转动侧隙(14)的方法,所述齿侧隙处于由第一齿轮(3)和第二齿轮(6)构成的啮合齿轮对的可预定义的区域内部,第一齿轮具有带有第一齿(12)的第一齿部(4),第二齿轮具有带有第二齿(13)的第二齿部(7),所述驱动装置具有第一轴(2)和质量平衡轴(5),第一齿轮设置在第一轴上并且第二齿轮设置在质量平衡轴上,使得第一齿轮的第一齿部与第二齿轮的第二齿部处于啮合嵌接,其特征在于,改变第一齿轮的沿该第一齿轮的周向相继的第一齿的第一基圆直径或第二齿轮的沿该第二齿轮

锥齿轮装配齿隙测量装置.pdf
本发明涉及一种锥齿轮装配齿隙测量装置,包括壳体、测量机构、固定机构,所述的测量机构和固定机构的支架安装在壳体上,支架的中部通过螺纹安装有中空的调整螺套,齿轮轴安装在壳体上并穿过调整螺套中间,所述的测量机构的齿轮轴上还固定有测臂,支架上设置有读数板,固定机构的支架上还设置有固定齿轮轴的机构。本发明通过设计固定及测量两套系统,并在调整螺套两侧设置有弹簧,实现对锥齿轮副的双向变值加力,共同保证实现按装配技术要求施力,满足对齿轮副进行的双向变值加力固定及测齿隙要求。
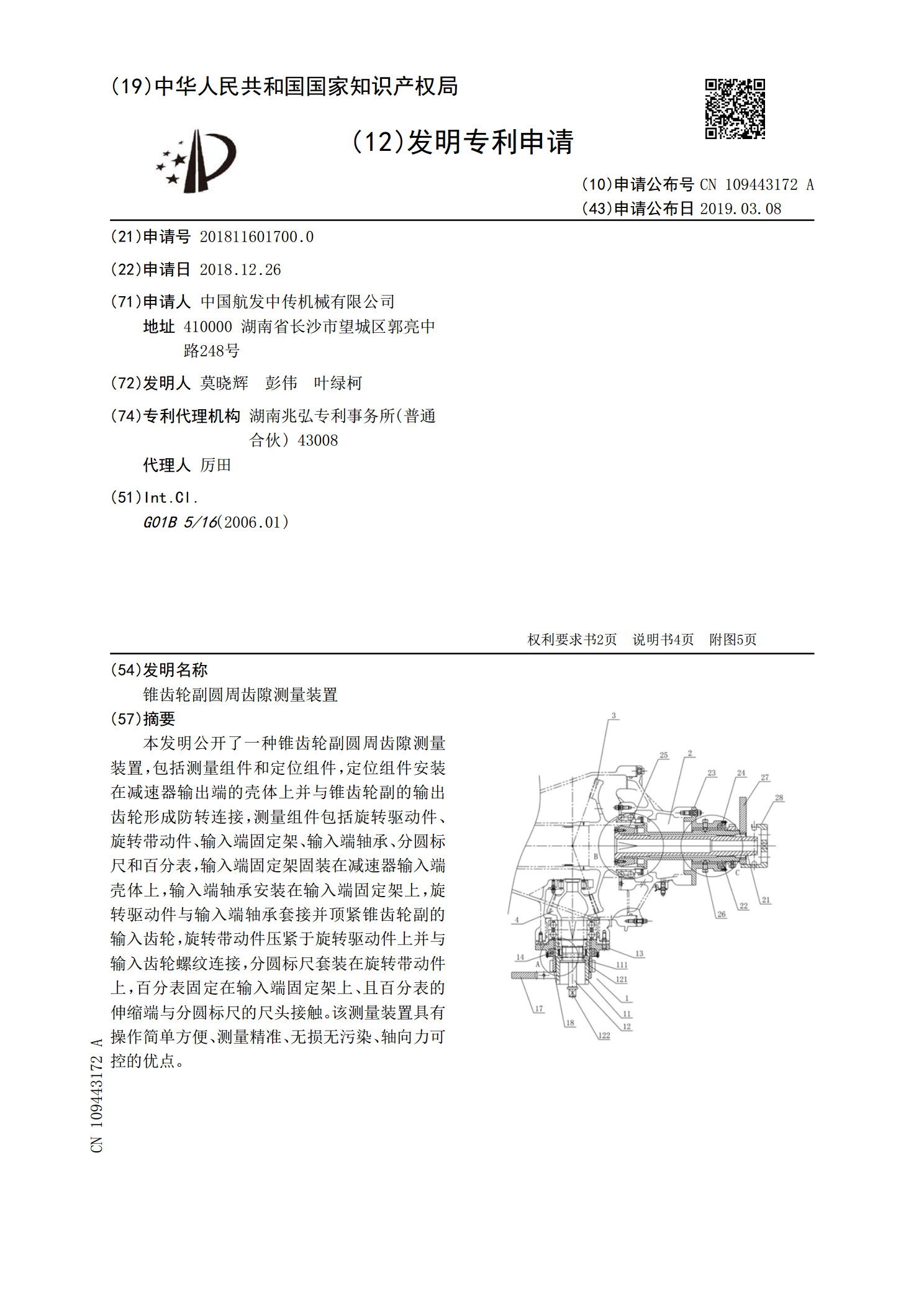
锥齿轮副圆周齿隙测量装置.pdf
本发明公开了一种锥齿轮副圆周齿隙测量装置,包括测量组件和定位组件,定位组件安装在减速器输出端的壳体上并与锥齿轮副的输出齿轮形成防转连接,测量组件包括旋转驱动件、旋转带动件、输入端固定架、输入端轴承、分圆标尺和百分表,输入端固定架固装在减速器输入端壳体上,输入端轴承安装在输入端固定架上,旋转驱动件与输入端轴承套接并顶紧锥齿轮副的输入齿轮,旋转带动件压紧于旋转驱动件上并与输入齿轮螺纹连接,分圆标尺套装在旋转带动件上,百分表固定在输入端固定架上、且百分表的伸缩端与分圆标尺的尺头接触。该测量装置具有操作简单方便、
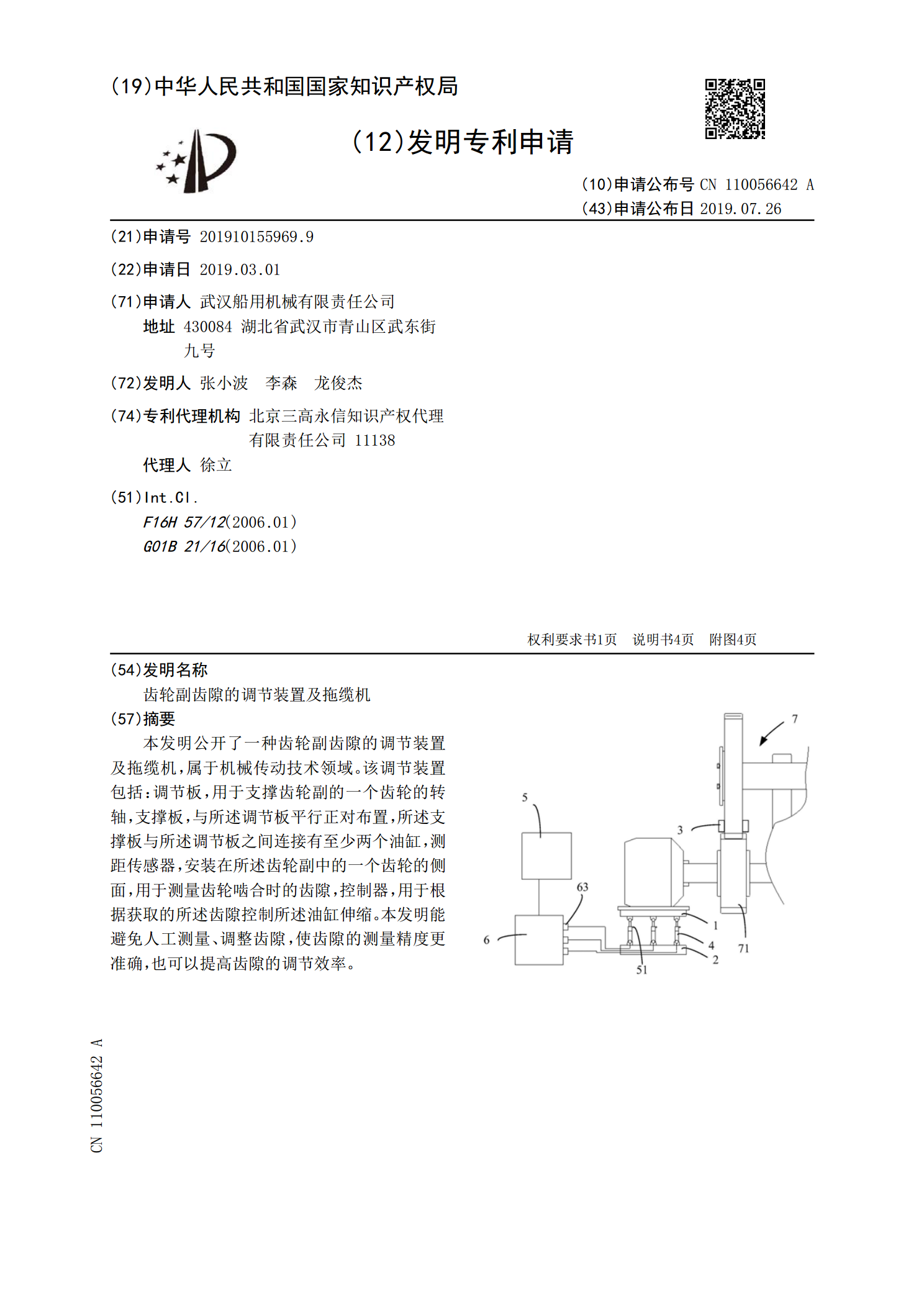
齿轮副齿隙的调节装置及拖缆机.pdf
本发明公开了一种齿轮副齿隙的调节装置及拖缆机,属于机械传动技术领域。该调节装置包括:调节板,用于支撑齿轮副的一个齿轮的转轴,支撑板,与所述调节板平行正对布置,所述支撑板与所述调节板之间连接有至少两个油缸,测距传感器,安装在所述齿轮副中的一个齿轮的侧面,用于测量齿轮啮合时的齿隙,控制器,用于根据获取的所述齿隙控制所述油缸伸缩。本发明能避免人工测量、调整齿隙,使齿隙的测量精度更准确,也可以提高齿隙的调节效率。