
一种磁齿轮电机控制方法及控制电路.pdf

梦影****主a

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种磁齿轮电机控制方法及控制电路.pdf
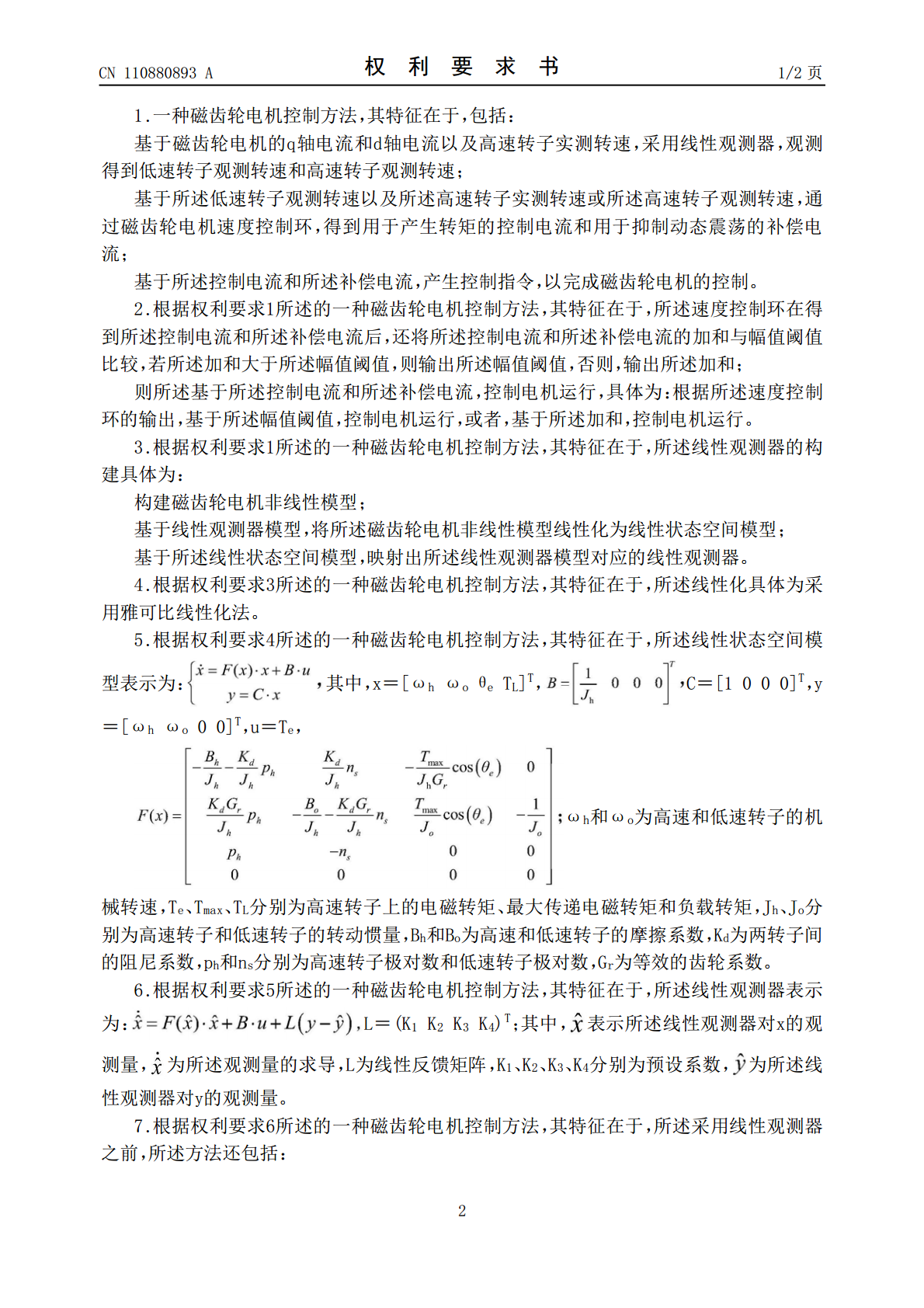
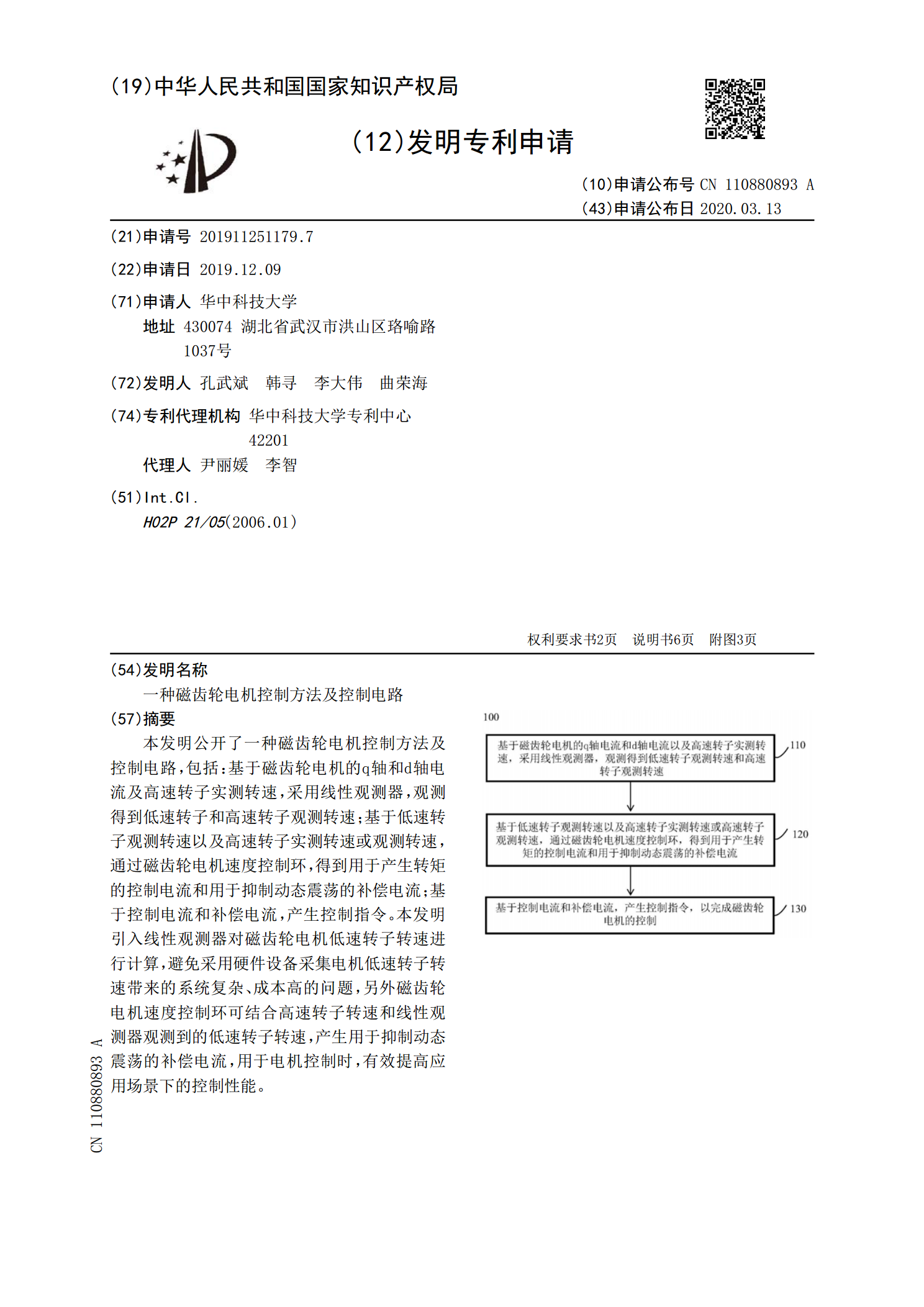
本发明公开了一种磁齿轮电机控制方法及控制电路,包括:基于磁齿轮电机的q轴和d轴电流及高速转子实测转速,采用线性观测器,观测得到低速转子和高速转子观测转速;基于低速转子观测转速以及高速转子实测转速或观测转速,通过磁齿轮电机速度控制环,得到用于产生转矩的控制电流和用于抑制动态震荡的补偿电流;基于控制电流和补偿电流,产生控制指令。本发明引入线性观测器对磁齿轮电机低速转子转速进行计算,避免采用硬件设备采集电机低速转子转速带来的系统复杂、成本高的问题,另外磁齿轮电机速度控制环可结合高速转子转速和线性观测器观测到的低
一种电机控制电路及其控制方法.pdf
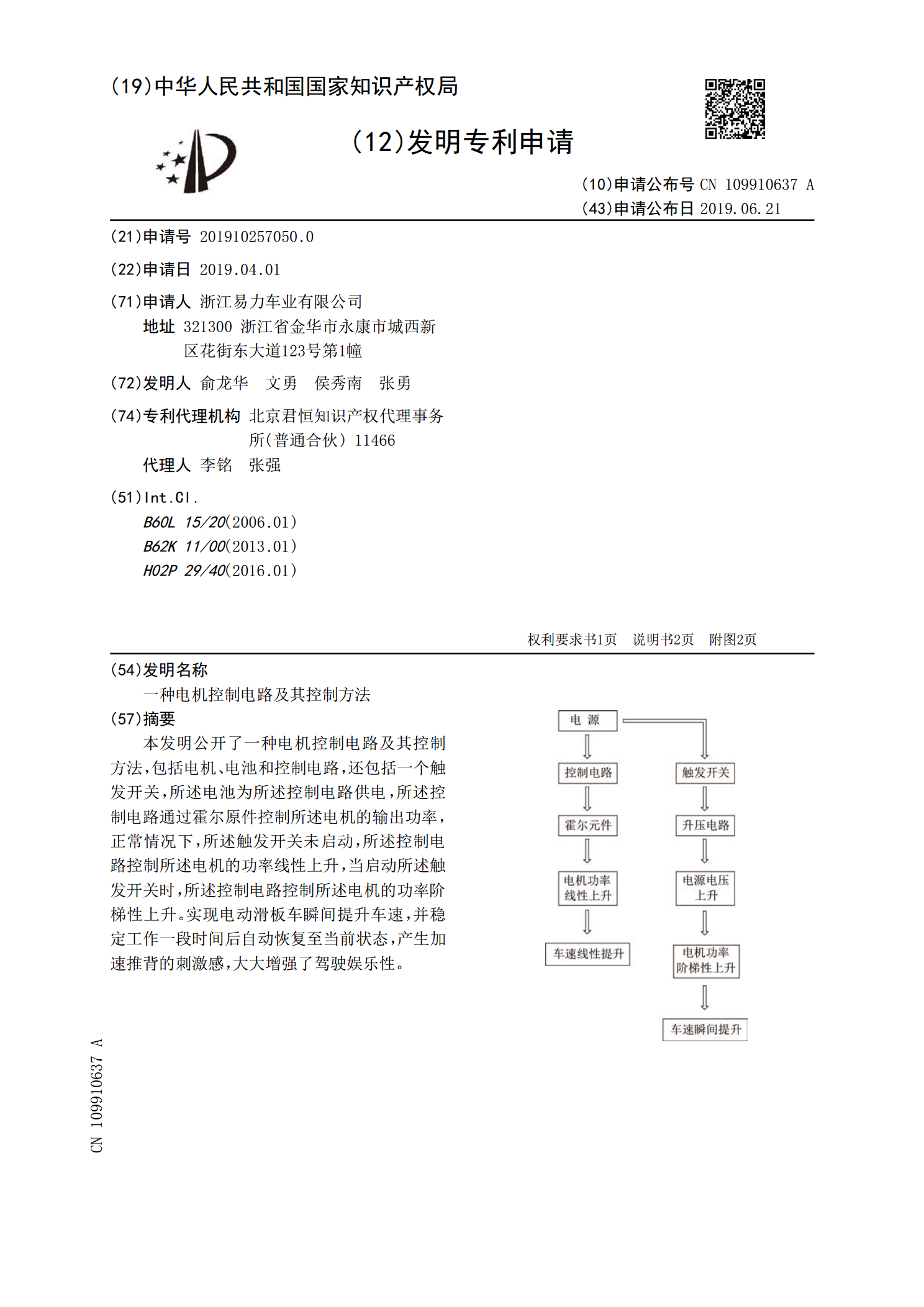
本发明公开了一种电机控制电路及其控制方法,包括电机、电池和控制电路,还包括一个触发开关,所述电池为所述控制电路供电,所述控制电路通过霍尔原件控制所述电机的输出功率,正常情况下,所述触发开关未启动,所述控制电路控制所述电机的功率线性上升,当启动所述触发开关时,所述控制电路控制所述电机的功率阶梯性上升。实现电动滑板车瞬间提升车速,并稳定工作一段时间后自动恢复至当前状态,产生加速推背的刺激感,大大增强了驾驶娱乐性。
一种磁齿轮复合电机.pdf
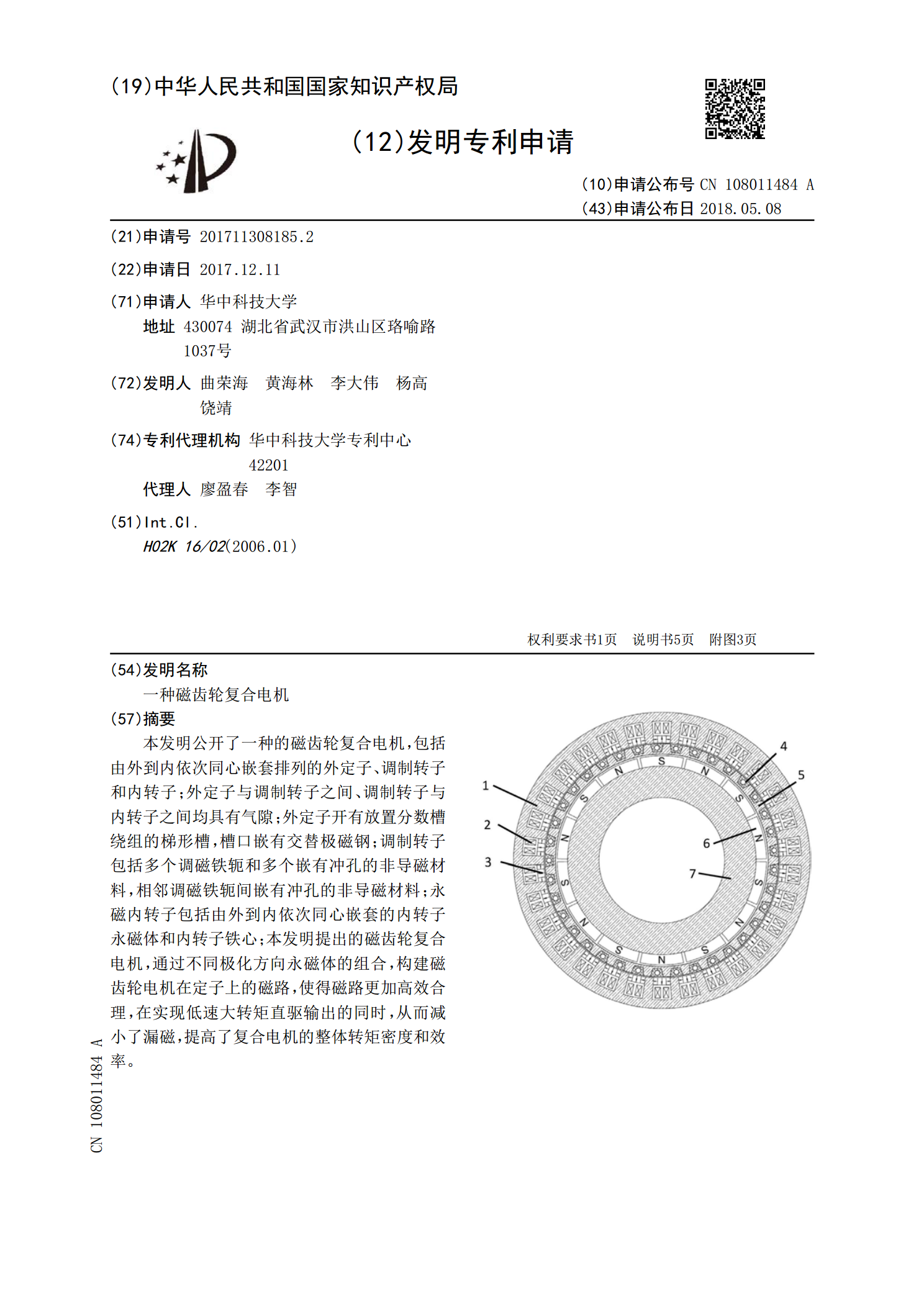
本发明公开了一种的磁齿轮复合电机,包括由外到内依次同心嵌套排列的外定子、调制转子和内转子;外定子与调制转子之间、调制转子与内转子之间均具有气隙;外定子开有放置分数槽绕组的梯形槽,槽口嵌有交替极磁钢;调制转子包括多个调磁铁轭和多个嵌有冲孔的非导磁材料,相邻调磁铁轭间嵌有冲孔的非导磁材料;永磁内转子包括由外到内依次同心嵌套的内转子永磁体和内转子铁心;本发明提出的磁齿轮复合电机,通过不同极化方向永磁体的组合,构建磁齿轮电机在定子上的磁路,使得磁路更加高效合理,在实现低速大转矩直驱输出的同时,从而减小了漏磁,提高
一种磁齿轮容错复合电机.pdf
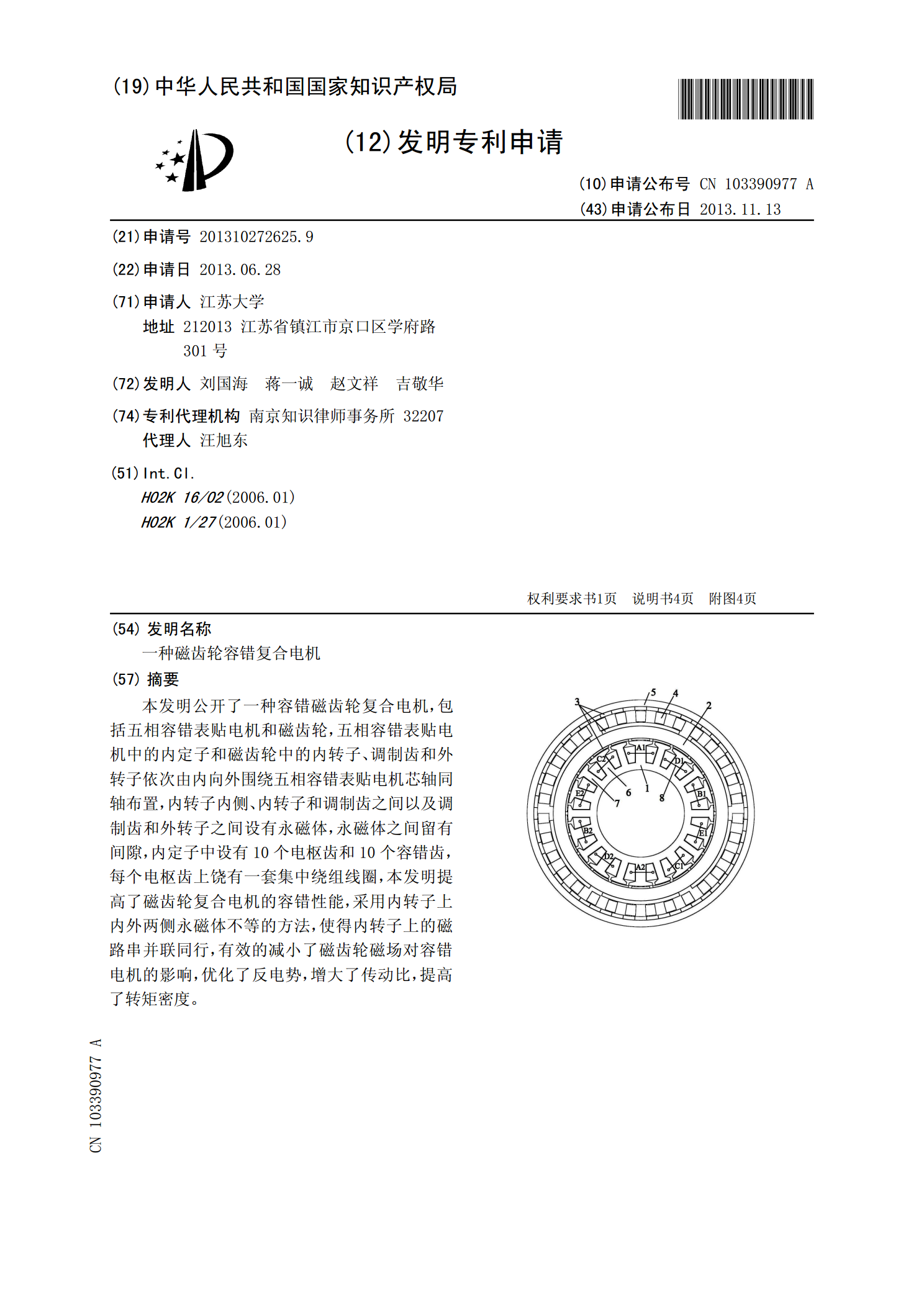
本发明公开了一种容错磁齿轮复合电机,包括五相容错表贴电机和磁齿轮,五相容错表贴电机中的内定子和磁齿轮中的内转子、调制齿和外转子依次由内向外围绕五相容错表贴电机芯轴同轴布置,内转子内侧、内转子和调制齿之间以及调制齿和外转子之间设有永磁体,永磁体之间留有间隙,内定子中设有10个电枢齿和10个容错齿,每个电枢齿上饶有一套集中绕组线圈,本发明提高了磁齿轮复合电机的容错性能,采用内转子上内外两侧永磁体不等的方法,使得内转子上的磁路串并联同行,有效的减小了磁齿轮磁场对容错电机的影响,优化了反电势,增大了传动比,提高了
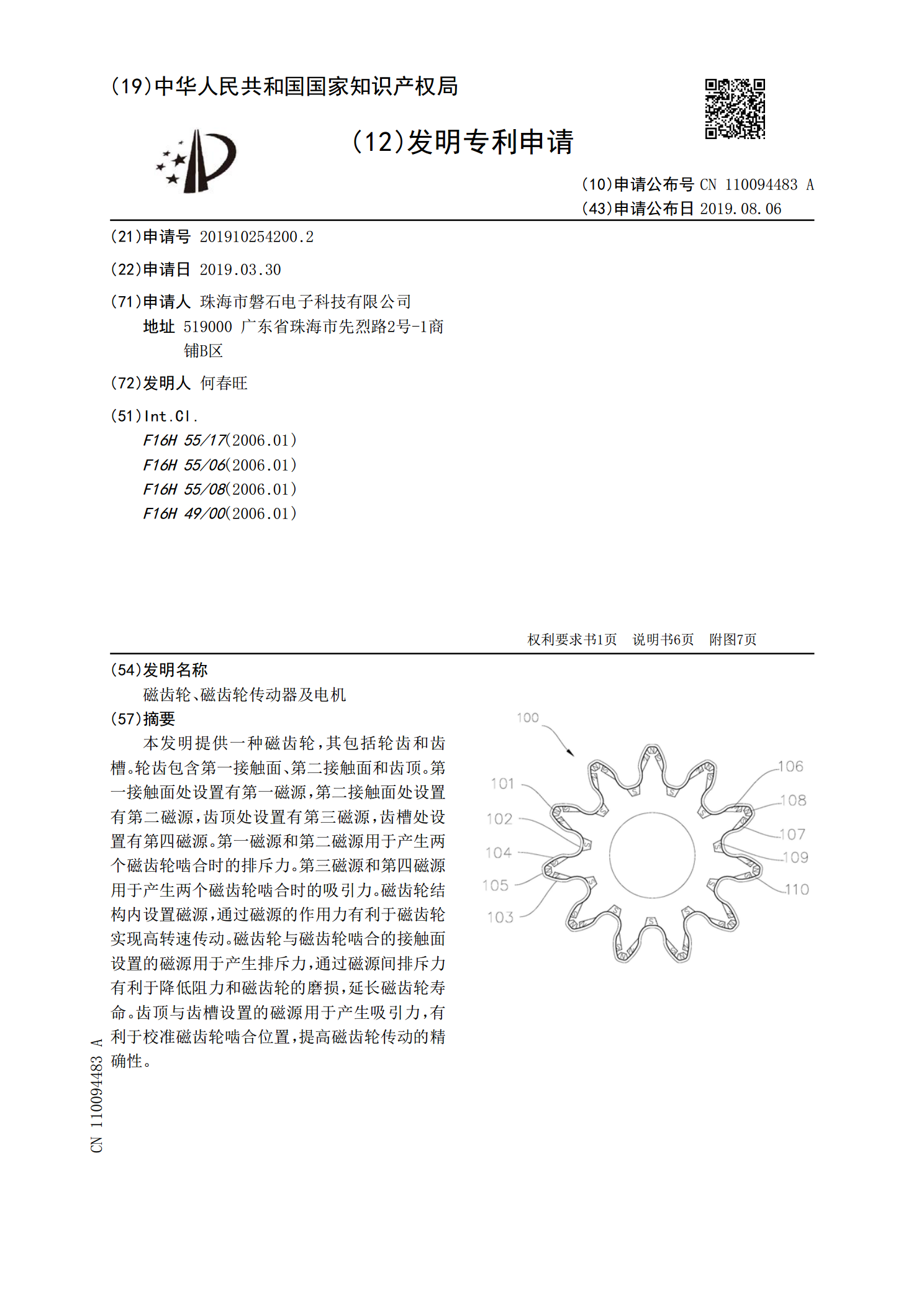
磁齿轮、磁齿轮传动器及电机.pdf
本发明提供一种磁齿轮,其包括轮齿和齿槽。轮齿包含第一接触面、第二接触面和齿顶。第一接触面处设置有第一磁源,第二接触面处设置有第二磁源,齿顶处设置有第三磁源,齿槽处设置有第四磁源。第一磁源和第二磁源用于产生两个磁齿轮啮合时的排斥力。第三磁源和第四磁源用于产生两个磁齿轮啮合时的吸引力。磁齿轮结构内设置磁源,通过磁源的作用力有利于磁齿轮实现高转速传动。磁齿轮与磁齿轮啮合的接触面设置的磁源用于产生排斥力,通过磁源间排斥力有利于降低阻力和磁齿轮的磨损,延长磁齿轮寿命。齿顶与齿槽设置的磁源用于产生吸引力,有利于校准磁